
Современный автомобиль очень сильно отличается от тех машин, которые можно было встретить на дорогах еще 10 лет назад. Появление электромобилей и гибридов, современный дизайн и эргономика делают поездки еще более комфортабельными и интересными. Вот о том, каков он, современный автомобиль, мы и поговорим в этой статье.

- Поведение автомобиля
- Кузов автомобиля
- Подвеска колес автомобиля
- Шины автомобиля
- Основные термины, относящиеся к кузову автомобиля
- Поступательное (равномерное) движение кузова
- Поступательные скорости и ускорения кузова
- Угол дрейфа автомобиля
- Центростремительное и тангенциальное ускорение
- Рыскание, продольная качка и поперечная качка
- Вращательные скорости и ускорения
- Момент рыскания, момент продольной качки и момент поперечной качки
- Измеряемые переменные кузова
- Основные термины, относящиеся к подвеске колес
- Угол поворота рулевого колеса и момент поворота рулевого колеса
- Угол поворота колес
- Угол поворота управляемых колес
- Передаточное отношение рулевого механизма
- Схождение и расхождение передних колес
- Угол развала колес
- Ось поворота колес
- Угол поперечного наклона оси поворота колеса
- Полюс поперечных перемещений, полюс крена, ось крена
- Полюс продольных перемещений, полюс продольной качки, ось продольной качки
- Измеряемые переменные подвески
- Колеса, основные термины
Поведение автомобиля
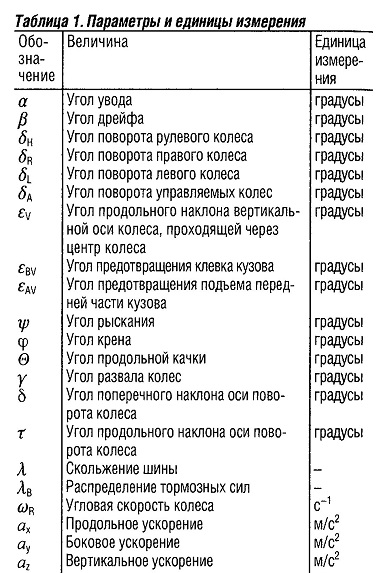
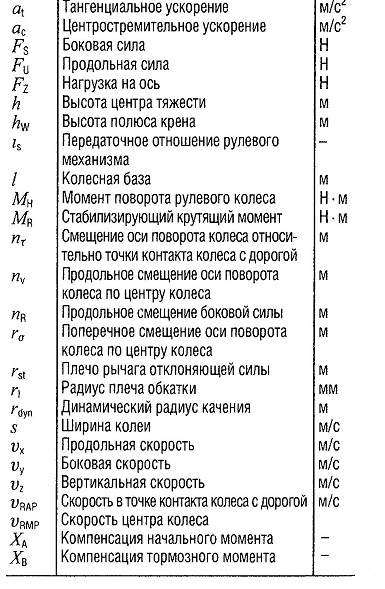
Понятие «поведение автомобиля» охватывает динамику его поперечных, прямолинейных и вертикальных перемещений. Так, динамика поперечных перемещений рассматривает поведение автомобиля под действием рулевого управления, динамика прямолинейного движений — разгона и торможения, а динамика вертикальных перемещений — перемещения частей автомобиля, вызываемого неровностями дороги. Объясняемые далее основные термины (величины и единицы измерения см. в табл. «Параметры и еденицы измерения») описывают поведение автомобиля в диапазоне частот приблизительно до 8 Гц. Многие из этих величин определены в немецком стандарте DIN 70000 и международном стандарте ISO 8855. Используемые величины можно разделить на три группы.
 |
 |
Кузов автомобиля
Движение кузова в общем случае можно описать как движение твердого тела. Даже для кузовов кабриолетов отклонения от законов движения твердого тела имеют место только при частотах свыше 10-15 Гц.
Подвеска колес автомобиля
Передние колеса имеют две степени свободы — в вертикальном направлении и в направлении поворота. Задние колеса, как правило имеют, только одну степень свободы в вертикальном направлении. На автомобилях с четырьмя управляемыми колесами задние колеса также имеют степень свободы в направлении поворота. Эти степени свободы определяются кинематикой и эластокинематикой осей. Кинематика оси описывает движение отдельных рычагов подвески как движения абсолютно твердых тел, в то время как эластокинематика описывает реакции осей автомобиля на воздействие различных сил и моментов.
Шины автомобиля
Шины являются важнейшими компонентами, обеспечивающими контакт автомобиля с дорогой, генерирующими силы, необходимые для движения, торможения и рулевого управления во взаимодействии с дорогой.
Основные термины, относящиеся к кузову автомобиля
Поступательное (равномерное) движение
 Поведение кузова описывается тремя поступательными и тремя вращательными степенями свободы (см. рис. «Поступательные и вращательные степени свободы кузова» ). В общем случае система координат (прямоугольная, правовинтовая система координат) имеет начало в центре тяжести автомобиля. Ось х направлена вперед, т.е. в направлении движения. Она расположена в плоскости, перпендикулярной к поверхности дороги. Эта плоскость называется центральной плоскостью автомобиля. Перпендикулярно к центральной плоскости автомобиля располагается ось у, направленная влево, глядя в направлении движения. Ось z направлена вверх. Поступательные движения имеют следующие наименования:
Поведение кузова описывается тремя поступательными и тремя вращательными степенями свободы (см. рис. «Поступательные и вращательные степени свободы кузова» ). В общем случае система координат (прямоугольная, правовинтовая система координат) имеет начало в центре тяжести автомобиля. Ось х направлена вперед, т.е. в направлении движения. Она расположена в плоскости, перпендикулярной к поверхности дороги. Эта плоскость называется центральной плоскостью автомобиля. Перпендикулярно к центральной плоскости автомобиля располагается ось у, направленная влево, глядя в направлении движения. Ось z направлена вверх. Поступательные движения имеют следующие наименования:
- В направлении оси х: прямолинейное движение;
- В направлении оси y: поперечное движение;
- В направлении оси z: подъем.
Поступательные скорости и ускорения
Производные поступательных перемещений по времени первого порядка определяют прямолинейную, поперечную и вертикальную составляющие скорости (νx, νy, νz). Производные перемещений по времени второго порядка дают прямолинейное ускорение ax, поперечное ускорение ау и вертикальное ускорение az.
Угол дрейфа автомобиля
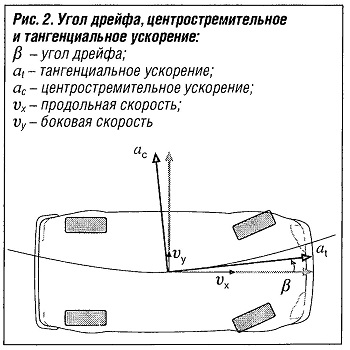 В динамике центр тяжести кузова не всегда движется вдоль оси х, происходит и поперечное движение. Угол между центральной плоскостью автомобиля и траекторией движения называется углом дрейфа β (см. рис. «Угол дрейфа, центростримительное и тангенциальное ускорение» ). Он отсчитывается от центральной плоскости автомобиля в направлении траектории. Угол дрейфа вычисляется, исходя из скорости прямолинейного движения vx и скорости поперечного движения vу
В динамике центр тяжести кузова не всегда движется вдоль оси х, происходит и поперечное движение. Угол между центральной плоскостью автомобиля и траекторией движения называется углом дрейфа β (см. рис. «Угол дрейфа, центростримительное и тангенциальное ускорение» ). Он отсчитывается от центральной плоскости автомобиля в направлении траектории. Угол дрейфа вычисляется, исходя из скорости прямолинейного движения vx и скорости поперечного движения vу
Р = arctan vу/vx
Поскольку скорость прямолинейного движения во время движения в прямом направлении по определению положительна, знак скорости поперечного движения определяет знак угла дрейфа.
Центростремительное и тангенциальное ускорение
Ускорение в горизонтальной плоскости, направленное вдоль мгновенной траектории движения автомобиля, раскладывается на центростремительное ускорение ас и тангенциальное ускорение аt. Центростремительное ускорение представляет собой составляющую, перпендикулярную к траектории, движения, в то время как тангенциальное ускорение является составляющей, направленной по касательной к траектории.
Рыскание, продольная качка и поперечная качка
Для описания вращательных движений введены следующие термины:
- Поворот вокруг оси z называется рысканием и описывается углом ψ
- Поворот вокруг оси у называется продольной качкой и описывается углом θ,
- Поворот вокруг оси х называется поперечной качкой или креном и описывается углом φ.
Знаки этих углов соответствуют знакам в правовинтовой прямоугольной системе координат. Направления отсчета показаны на рис. «Поступательные и вращательные степени свободы кузова». Часто во время маневрирования кузов одновременно движется вокруг более чем одной оси. Поскольку с математической точки зрения эти три направления поворота не являются коммутативными, в стандарте DIN 70000 определен следующий порядок:
- Рыскание.
- Продольная качка.
- Поперечная качка (крен).
Вращательные скорости и ускорения
Производные вращательных перемещений по времени первого порядка определяют скорости рыскания, продольной и поперечной качки. Производные вращательных перемещений по времени второго порядка определяют ускорения рыскания, продольной и поперечной качки.
Момент рыскания, момент продольной качки и момент поперечной качки
Внешние силы, действующие на автомобиль, могут создавать момент относительно центра тяжести. Этот момент можно разбить на три составляющие. Составляющая, действующая вокруг оси z, называется моментом рыскания, вокруг оси у — моментом продольной качки и вокруг оси х — моментом поперечной качки.
Измеряемые переменные кузова
При разработке конструкции автомобиля необходимо с высокой точностью измерять значения параметров, описывающих его поведение. В динамике поперечного движения поступательные ускорения и углы положения часто измеряются при помощи гиростабилизированных платформ. Абсолютные положения регистрируются измерительными системами GPS. Прямолинейные и поперечные ускорения и угол дрейфа измеряются при помощи бесконтактных датчиков скорости.
В динамике вертикального движения поступательные ускорения измеряются в различных точках кузова в каждом из трех направлений в пространстве. Используя эти данные, можно определить наиболее важные ускорения кузова, т.е. ускорения подъема, продольной и поперечной качки.
Основные термины, относящиеся к подвеске колес
Угол поворота рулевого колеса и момент поворота рулевого колеса
Угол поворота рулевого колеса δН — это угол поворота, измеряемый относительно положения прямолинейного движения. Угол считается положительным в левом направлении вращения.
Для изменения угла поворота рулевого колеса водитель должен приложить к нему вращающий момент. Этот момент называется моментом поворота рулевого колеса Мн и также является положительным в левом направлении вращения.
Угол поворота колес
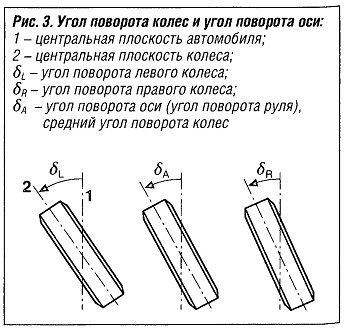 Перемещение рулевого колеса вызывает поворот передних колес в одном направлении. При этом изменяются углы поворота правого и левого колес δR и δL, соответственно. Угол поворота представляет собой угол между центральной плоскостью автомобиля и центральной плоскостью колеса, спроектированный на поверхность дороги (см. рис. «Угол поворота колес и угол поворота оси» ). В случае поворота в положительном направлении, т.е. против часовой стрелки, вокруг оси z угол схождения также является положительным. На автомобилях с четырьмя управляемыми колесами поворачиваются также и задние колеса.
Перемещение рулевого колеса вызывает поворот передних колес в одном направлении. При этом изменяются углы поворота правого и левого колес δR и δL, соответственно. Угол поворота представляет собой угол между центральной плоскостью автомобиля и центральной плоскостью колеса, спроектированный на поверхность дороги (см. рис. «Угол поворота колес и угол поворота оси» ). В случае поворота в положительном направлении, т.е. против часовой стрелки, вокруг оси z угол схождения также является положительным. На автомобилях с четырьмя управляемыми колесами поворачиваются также и задние колеса.
Угол поворота управляемых колес
При повороте рулевого колеса передние колеса поворачиваются на различные углы. Разница углов поворота колес при повороте рулевого колеса в крайнее положение может достигать нескольких градусов. При это угол поворота внутреннего колеса больше угла поворота наружного колеса. Средний угол поворота называется углом поворота δA (см. рис. «Угол поворота колес и угол поворота оси» ).
Передаточное отношение рулевого механизма
За счет рулевого механизма, а также кинематики передней оси угол поворота колес всегда значительно меньше угла поворота рулевого колеса. При отсутствии внешних сил или моментов и при незначительной нагрузке автомобиля передаточное отношение рулевого механизма is определяется следующим уравнением:
is = 2δH / (δR+δL)
Схождение и расхождение передних колес
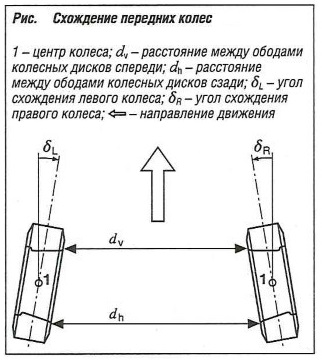 Когда рулевое колесо находится в положении прямолинейного движения, углы поворота передних колес находятся в динамически благоприятном диапазоне от 0,1° до 0,3°. Когда расстояние между ободами колесных дисков перед центрами колес меньше этого же расстояния позади центров колес, имеет место схождение колес (см. рис. «Схождение передних колес» ). Если ситуация противоположна, имеет место расхождение колес. Как схождение, так и расхождение указываются в градусах (°).
Когда рулевое колесо находится в положении прямолинейного движения, углы поворота передних колес находятся в динамически благоприятном диапазоне от 0,1° до 0,3°. Когда расстояние между ободами колесных дисков перед центрами колес меньше этого же расстояния позади центров колес, имеет место схождение колес (см. рис. «Схождение передних колес» ). Если ситуация противоположна, имеет место расхождение колес. Как схождение, так и расхождение указываются в градусах (°).
Термины схождение и расхождение применимы также к отдельно взятому колесу. В этом случае схождение означает, что колесо повернуто к центральной плоскости автомобиля, а расхождение — от центральной плоскости.
Угол развала колес
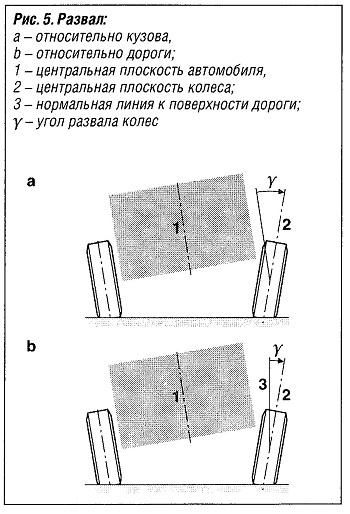 Угол развала колес γ — это угол между центральной плоскостью автомобиля и центральной плоскостью колеса, спроектированный на плоскость z-y. Угол развала является положительным, если расстояние между колесами и центральной плоскостью автомобиля вверху больше чем внизу (см. рис. а, «Развал» ). В связи с кинематикой оси угол развала колес относительно кузова зависит от хода пружин подвески.
Угол развала колес γ — это угол между центральной плоскостью автомобиля и центральной плоскостью колеса, спроектированный на плоскость z-y. Угол развала является положительным, если расстояние между колесами и центральной плоскостью автомобиля вверху больше чем внизу (см. рис. а, «Развал» ). В связи с кинематикой оси угол развала колес относительно кузова зависит от хода пружин подвески.
В дополнение к этому определению также важной характеристикой является угол развала колес относительно дороги. Это угол между центральной плоскостью автомобиля и нормалью к поверхности дороги (см. рис. b, «Развал» ). Знак угла развала определяется в соответствии с правовинтовой прямоугольной системой координат. Если центральная плоскость автомобиля перпендикулярна к поверхности дороги, оба определения угла развала в отношении его величины равнозначны. В противном случае необходимо соблюдать точное определение.
Ось поворота колес
При повороте рулевого колеса колеса поворачиваются не вокруг оси z, а вокруг собственной оси поворота колеса. Положение оси поворота колеса в основном определяется кинематикой оси (см. рис. «Положение оси поворота колеса в проекции на центральную плоскость автомобиля» и «Положение оси поворота колеса в проекции на поперечную плоскость автомобиля» ).
 |
 |
Угол продольного наклона оси поворота колеса, смещение оси по центру колеса и расстояние между точкой пересечения оси поворота колеса с дорожной поверхностью и центром контакта колеса с дорогой
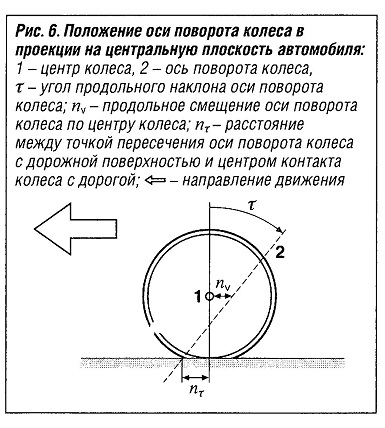
Если спроектировать колесо и ось поворота колеса на центральную плоскость автомобиля, ось поворота колеса будет наклонена на угол τ. Этот угол считается положительным, если верхний конец оси поворота колеса наклонен назад (см. рис. «Положение оси поворота колеса в проекции на центральную плоскость автомобиля» ). В этой проекции ось поворота колеса обычно не проходит через центр колеса. На самом деле она смещена назад на расстояние nv, называемое продольным смещением оси поворота колеса относительно центра колеса.
Расстояние между точкой контакта колеса с поверхностью дороги и точкой, в которой ось поворота колеса пересекает поверхность дороги, называется смещением оси поворота колеса. Если эта точка пересечения расположена перед центром колеса (рис. «Положение оси поворота колеса в проекции на центральную плоскость автомобиля» ), смещение оси поворота колеса является положительным. Обычно величина этого смещения составляет от 15 до 30 мм.
Угол поперечного наклона оси поворота колеса, поперечное смещение оси поворота колеса по центру колеса, плечо рычага отклоняющей силы и радиус плеча обкатки
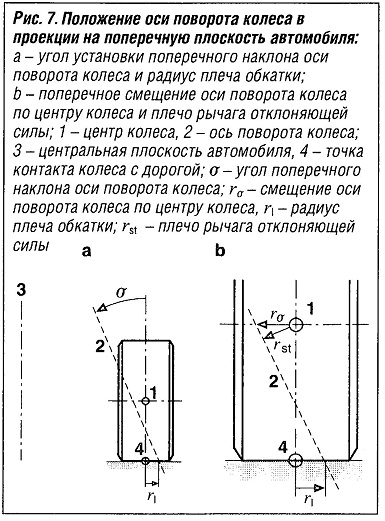
Если спроектировать колесо и ось поворота колеса на поперечную плоскость автомобиля, ось поворота колеса будет наклонена на угол σ (см. рис. а, «Положение оси поворота колеса в проекции на поперечную плоскость автомобиля» ). Угол поперечного наклона оси поворота колеса является положительным, когда ось наклонена к центру автомобиля. Углы установки поперечного наклона оси поворота колеса обычно являются положительными.
Расстояние между центром колеса и осью поворота колеса в направлении, параллельном дороге, называется поперечным смещением оси поворота колеса по центру колеса rσ. Смещение является положительным, когда центр колеса находится дальше от центральной плоскости автомобиля, чем ось поворота колеса (см. рис. b, «Положение оси поворота колеса в проекции на поперечную плоскость автомобиля» ). Кратчайшее расстояние между центром колеса и осью поворота колеса rst называется плечом рычага отклоняющей силы. Плечо рычага отклоняющей силы является положительным, если центр колеса находится дальше от центральной плоскости автомобиля, чем ось поворота колеса.
Оси расположены таким образом, что смещение оси поворота колеса по центру колеса и плечо рычага отклоняющей силы минимальны. Такая компоновка предотвращает возникновение отклоняющих сил в рулевом механизме.
Расстояние между точкой контакта колеса с поверхностью дороги и точкой, в которой ось поворота колеса пересекает поверхность дороги называется радиусом плеча обкатки rI (рис. а, «Положение оси поворота колеса в проекции на поперечную плоскость автомобиля» ). Радиус плеча обкатки является положительным, если точка контакта колеса с дорогой находится дальше от центральной плоскости автомобиля, чем ось поворота колеса. Если радиус плеча обкатки положительный, под действием сил торможения колесо поворачивается в сторону расхождения. Такое поведение особенно благоприятно во время «торможения на кривой». Если радиус плеча обкатки отрицательный, под действием сил торможения колесо поворачивается в сторону схождения. Во время торможения в условиях различного сцепления колес с дорогой справа и слева такое поведение оси создает условия для более стабильной управляемости автомобиля. В связи с этими различными эффектами радиус плеча обкатки делается как можно меньшим.
Полюс поперечных перемещений, полюс крена, ось крена
Во время сжатия и обратной отдачи компонентов подвески положение колес определяется в основном кинематикой и эласто- кинематикой оси. Колесо перемещается в поперечном к направлению движения направлении вокруг полюса поперечных перемещений (см. рис. «Полюс поперечных перемещений и полюс крена» ). Скорости перемещения точки контакта колеса с дорогой (νRAP) и центра колеса (νRMP) во время сжатия и обратной отдачи направлены перпендикулярно к линиям, соединяющим эти точки с полюсом поперечных перемещений. Во время сжатия и обратной отдачи положение полюса поперечных перемещений изменяется.
В случае малых поперечных ускорений кузов автомобиля перемещается вокруг полюса крена соответствующей оси (см. рис. «Полюс поперечных перемещений и полюс крена» ). Полюс крена лежит в центральной плоскости автомобиля, на линии, соединяющей точку контакта колеса с дорогой, с полюсом поперечных перемещений, т.е. посередине ширины колеи (s/2). Высота полюса крена hW может быть легко вычислена по формуле:
hW = νRAPy/νRAPx · s/2
Высота полюса крена, как правило, составляет менее 120 мм. Чтобы избежать эффекта подпора (поддомкрачивания) в случае высоких поперечных ускорений, высота полюса крена уменьшается при сжатии. Полюс крена известен также под названием центра крена или мгновенного центра.
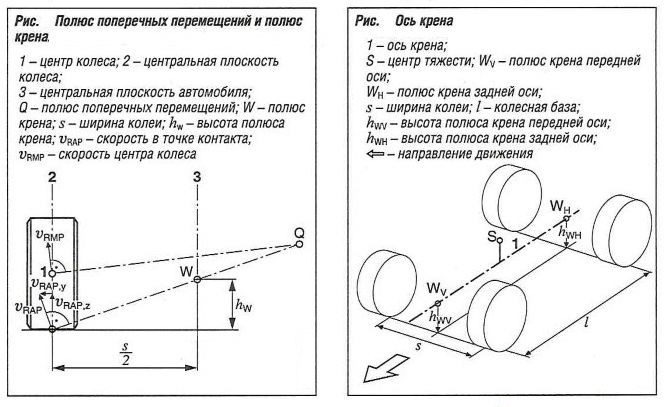
Линия, соединяющая полюс крена передней оси с полюсом крена задней оси, называется осью крена (см. рис. «Ось крена» ). Центр тяжести кузова обычно располагается выше оси крена. (Высота центра тяжести кузова для седанов составляет от 550 до 650 мм.) Это положение оси крена имеет место при малых поперечных ускорениях. В случае более высоких поперечных ускорений следует учитывать как регулировку подвески, так и поведение осей колес. В этом случае ось крена не обязательно лежит в центральной плоскости автомобиля.
Полюс продольных перемещений, полюс продольной качки, ось продольной качки, компенсация тормозного момента и компенсация начального момента
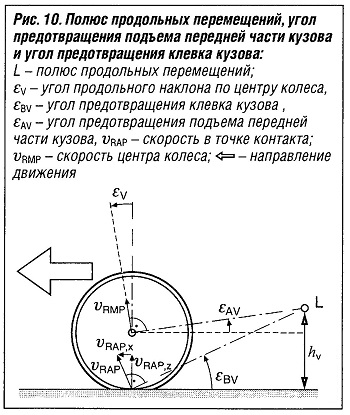 В проекции упругого перемещения оси на центральную плоскость автомобиля колесо перемещается вокруг полюса продольных перемещений (см. рис. «Полюс продольных перемещений, угол предотвращения передней части кузова и угол предотвращения клева кузова» ). Во время сжатия центр колеса перемещается вверх под углом продольного наклона вертикальной оси, проходящей через центр колеса εv. Скорости в точке контакта колеса с дорогой (vRAP) и центра колеса (vRMP) во время сжатия и обратной отдачи направлены перпендикулярно к линиям, соединяющим их с полюсом продольных перемещений. Положение полюса продольных перемещений во время сжатия и обратной отдачи может изменяться. Угол между линией, соединяющей точку контакта колеса с дорогой с полюсом продольных перемещений, и дорогой называется углом предотвращения клевка кузова εBV. Угол между линией, соединяющей центр колеса с полюсом продольных перемещений и линией, параллельной дороге, называется углом предотвращения подъема передней части кузова εAV.
В проекции упругого перемещения оси на центральную плоскость автомобиля колесо перемещается вокруг полюса продольных перемещений (см. рис. «Полюс продольных перемещений, угол предотвращения передней части кузова и угол предотвращения клева кузова» ). Во время сжатия центр колеса перемещается вверх под углом продольного наклона вертикальной оси, проходящей через центр колеса εv. Скорости в точке контакта колеса с дорогой (vRAP) и центра колеса (vRMP) во время сжатия и обратной отдачи направлены перпендикулярно к линиям, соединяющим их с полюсом продольных перемещений. Положение полюса продольных перемещений во время сжатия и обратной отдачи может изменяться. Угол между линией, соединяющей точку контакта колеса с дорогой с полюсом продольных перемещений, и дорогой называется углом предотвращения клевка кузова εBV. Угол между линией, соединяющей центр колеса с полюсом продольных перемещений и линией, параллельной дороге, называется углом предотвращения подъема передней части кузова εAV.
Полюс продольных перемещений передней оси находится позади передних колес, а полюс продольных перемещений задних колес находится перед задними колесами (см. рис. «Полюс продольной качки» ).
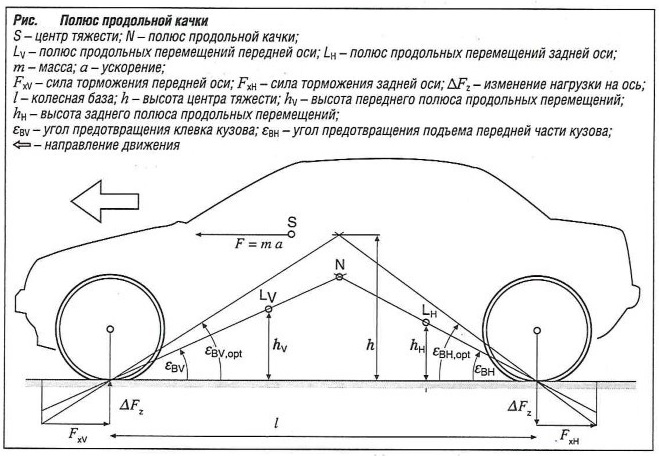
Во время торможения автомобиля нагрузка на переднюю ось увеличивается на ΔFz, а нагрузка на заднюю ось уменьшается на ΔFz. При этом к центру тяжести автомобиля прилагается сила F = ma. При коэффициенте распределения сил торможения λв к передней и задней осям прилагаются силы торможения FxV = λвFx и Fxh = (1 -λв)FX, соответственно. В оптимальном случае, когда результирующая сила FxV и ΔFz, действующая на переднюю ось, проходит точно через полюс продольных перемещений и аналогично для задней оси, движений пружинных элементов подвески и, соответственно, кузова не происходит. Оптимальные значения углов предотвращения клевка кузова и предотвращения подъема передней части кузова равны:
tan(εBV,opt) = 1/λв ⋅ h/l
tan(εBH,opt) = 1/(1-λв) ⋅ h/l
при колесной базе l и высоте центра тяжести h.
Две линии, соединяющие точки контакта колес с дорогой с полюсами продольных перемещений, соединяются в точке полюса продольной качки N (рис. «Полюс продольной качки» ). Полюс продольной качки N всегда находится ниже центра тяжести, что позволяет во время торможения всегда обеспечить ожидаемое движение продольной качки автомобиля, направленное назад. Ось продольной качки проходит через полюс продольной качки и перпендикулярна центральной плоскости автомобиля. Компенсация тормозного момента XBV и ХBH представляет собой меру оптимизации процесса торможения. При этом применимо следующее:
XBV = tan(εBV) / tan(εBV,opt) ⋅ 100%
ХBH = tan(εBH) / tan(εBH,opt) ⋅ 100%
To же самое относится к ускорению. При этом необходимо учитывать тип привода (полный, передний или задний привод), а также тот Факт, что сила тяги прилагается к центру колеса. В общем случае полного привода значения компенсации начального момента XAV и ХAH составляют:
XAV = tan(εAV) / tan(εAV,opt) ⋅ 100%
ХAH = tan(εAH) / tan(εAH,opt) ⋅ 100%
Измеряемые переменные
Угол и момент поворота рулевого колеса измеряются при помощи специальных мерных роликов. Если точность измерений достаточна, можно использовать датчик угла поворота рулевого колеса, устанавливаемый на многих автомобилях в качестве стандартного оборудования.
Для измерения углов схождения и развала колес могут использоваться как мобильные, так и стационарные специальные измерительные устройства. Как правило, эти углы измеряются на специальных испытательных стендах.
Специальные стенды также используются для измерения угла поворота оси рулевой колонки и передаточного отношения рулевого механизма.
Переменные величины, характеризующие положение оси поворота колеса, непосредственно не измеряются. Часто посредством геометрических измерений вычисляются следующие переменные: угол продольного наклона оси поворота колеса, продольное смещение оси поворота колеса по центру колеса, смещение оси поворота колеса относительно точки контакта колеса с дорогой, угол установки продольного наклона оси поворота колеса, плечо рычага отклоняющей силы и радиус плеча обкатки. Положение полюса крена можно определить посредством измерения изменения ширины колеи во время возвратно-поступательных перемещений при сжатии и обратной отдаче оси колес. Положение оси крена определяется по положениям полюсов крена передней и задней осей.
Положения полюсов продольной качки и степени компенсации начального и тормозного моментов непосредственно не измеряются; они определяются по измеренным положениям кинематических точек осей. То же самое относится к продольному наклону по центру колеса и углам предотвращения клевка кузова и подъема передней части кузова.
Колеса, основные термины
Наиболее важные внешние силы и моменты, воздействующие на автомобиль, возникают во время передачи сил между колесами и поверхностью дороги. К ним следует добавить силу ветра, которая также может воздействовать на автомобиль.
Область контакта колеса
Передача сил между колесом и поверхностью дороги за счет трения происходит в области контакта колеса. Двумя наиболее важными видами трения являются трение сцепления (за счет сил межмолекулярного сцепления) и гистерезисное трение (за счет сил механического сцепления).
Боковая сила, продольная сила действующие на колесо
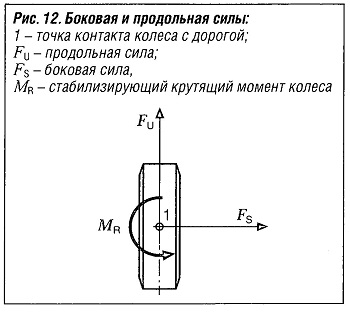 Силы могут генерироваться в плоскости дороги за счет трения. Боковая сила Fs — это сила, перпендикулярная к центральной плоскости колеса; продольная сила Fu лежит в центральной плоскости колеса (рис. «Боковая сила и продольная сила» ). В общем случае точной точкой приложения сил не является точка контакта колеса с дорогой, поэтому имеют место моменты, действующие относительно точки контакта (см. «Стабилизирующий крутящий момент»).
Силы могут генерироваться в плоскости дороги за счет трения. Боковая сила Fs — это сила, перпендикулярная к центральной плоскости колеса; продольная сила Fu лежит в центральной плоскости колеса (рис. «Боковая сила и продольная сила» ). В общем случае точной точкой приложения сил не является точка контакта колеса с дорогой, поэтому имеют место моменты, действующие относительно точки контакта (см. «Стабилизирующий крутящий момент»).
Нагрузка на колесо и угол увода
Когда боковая и продольная силы возникают одновременно, они могут оказывать взаимное влияние друг на друга. Ситуация, когда боковая и продольная силы возникают, но не комбинируются, рассмотрена ниже. Генерируемая боковая сила Fs зависит от нагрузки на колесо и угла увода а. Зависимость боковой силы Fs от скорости в общем случае можно проигнорировать. Нагрузка на колесо — это сила, с которой центр колеса прижимается к плоскости дорожной поверхности. Угол увода а — это угол между направлением движения точки контакта колеса с поверхностью дороги и центральной плоскостью колеса (рис. «Угол увода» ).
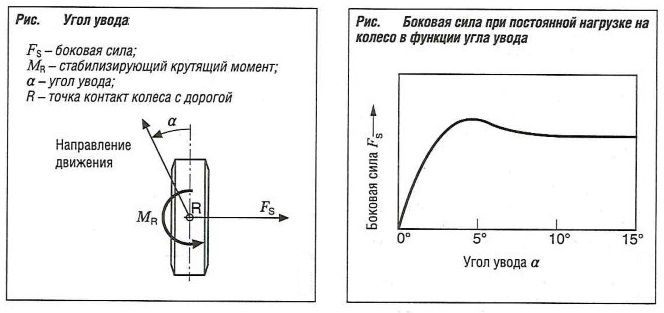
Когда нагрузка на колесо остается постоянной, а угол увода а увеличивается, боковая сила сначала линейно возрастает. Боковая сила достигает максимального значения при угле увода приблизительно 5°, а затем несколько снижается (рис. «Боковая сила при постоянной нагрузке на колесо в функции угла увода» ).
Стабилизирующий крутящий момент и продольное смещение боковой силы
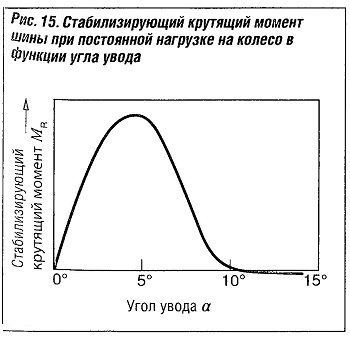 При малых углах увода точка приложения боковой силы находится позади точки контакта колеса с поверхностью. При увеличении угла увода точка приложения боковой силы последовательно сдвигается в направлении точки контакта и может оказаться даже впереди нее. Расстояние между точкой приложения боковой силы и точкой контакта колеса с дорогой называется продольным смещением боковой силы. Следовательно, боковая сила создает момент вокруг вертикальной оси колеса — стабилизирующий крутящий момент MR:
При малых углах увода точка приложения боковой силы находится позади точки контакта колеса с поверхностью. При увеличении угла увода точка приложения боковой силы последовательно сдвигается в направлении точки контакта и может оказаться даже впереди нее. Расстояние между точкой приложения боковой силы и точкой контакта колеса с дорогой называется продольным смещением боковой силы. Следовательно, боковая сила создает момент вокруг вертикальной оси колеса — стабилизирующий крутящий момент MR:
MR = Fs nR
При постоянной нагрузке на колесо это дает зависимость стабилизирующего крутящего момента от угла увода, показанную на рис. «Стабилизирующий крутящий момент шины при постоянной нагрузке на колесо в функции угла увода».
Когда стабилизирующий крутящий момент положительный, это помогает уменьшить величину угла увода. Это способствует возврату повернутых колес в положение, соответствующее прямолинейному движению автомобиля при отпускании рулевого колеса.
Скольжение и радиус качения
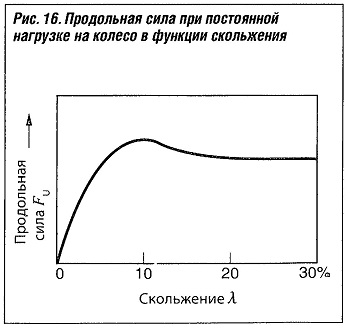 Аналогично углу увода а для боковой силы Fs, скольжение λ является переменной, которая при постоянной нагрузке на колесо определяет величину продольной силы Fu. Скольжение возникает, когда скорость vxR, с которой центр колеса движется в продольном направлении, отличается от окружной скорости vu. Окружная скорость вычисляется по угловой скорости колеса ωR и динамическому радиусу качения rdyn:
Аналогично углу увода а для боковой силы Fs, скольжение λ является переменной, которая при постоянной нагрузке на колесо определяет величину продольной силы Fu. Скольжение возникает, когда скорость vxR, с которой центр колеса движется в продольном направлении, отличается от окружной скорости vu. Окружная скорость вычисляется по угловой скорости колеса ωR и динамическому радиусу качения rdyn:
vu = ωR • rdyn
Необходимо различать статические и динамические радиусы качения. Статический радиус качения — это кратчайшее расстояние между центром колеса и точкой контакта колеса с дорогой. Динамический радиус качения rdyn вычисляется, исходя из длины окружности U как:
rdyn = U/2π
Скольжение λА для сил тяги определяется как:
λА = (ωR rdyn — vxR) / ωR rdyn
Аналогично скольжение λв для сил торможения определяется как:
λА = (ωR rdyn — vxR) / vxR
В соответствии с этим определением, скольжение при разгоне (тяговое скольжение) всегда положительное, а при торможении — отрицательное. Эти два определения скольжения означают, что когда колесо заблокировано (ωR=0, λв=-1), имеет место скольжение -100 %, а когда оно пробуксовывает (vxR=0, λА=1) величина скольжения составляет 100 %.
Если тяговое проскальзывание увеличивается при постоянной нагрузке на колесо, сила тяги (продольная сила) линейно возрастает. При тяговом проскальзывании, равном приблизительно 10%, продольная сила достигает максимального значения, а затем снижается (см. рис. «Продольная сила при постоянной нагрузке на колесо в функции скольжения»). То же самое относится к скольжению при торможении. Здесь максимальная тормозная сила создается при скольжении приблизительно —10%.
Измеряемые переменные
Угол увода а измеряется вдоль линий, аналогичных линиям угла дрейфа, при помощи двух бесконтактных датчиков скорости.
Скорость вращения колеса и продольная скорость измеряются для определения скольжения λ.
Динамический радиус качения rdyn определяется на испытательных стендах.
Стабилизирующий крутящий момент MR, боковая сила Fs и продольная сила Fu могут быть измерены во время движения при помощи многокомпонентных измерительных роликов. Поскольку это очень дорогостоящая операция, силы и моменты, воздействующие на колеса, обычно измеряются на стационарных испытательных стендах или определяются на специальных автомобилях непосредственно на дороге. До настоящего времени точное измерение сил и моментов, воздействующих на колеса, сопровождалось большим количеством сбоев измерительных систем.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: