
В конце 1970-х годов были разработаны международные стандартизованные методики динамических испытаний автомобилей. С одной стороны, они имеют целью как можно более объективно и последовательно описать поведение автомобиля; с другой стороны, они служат для определения характерных переменных величин, которые хорошо коррелируют с субъективными впечатлениями водителя. Кроме того, стандартизованные методики испытаний могут быть использованы для сравнения результатов испытаний с результатами моделирования при идентичных граничных условиях.

Обзор методик динамических испытаний
 При изучении поведения автомобиля, обычно исследуют систему «водитель — автомобиль — дорога» (см. рис. «Комплексная система «водитель-автомобиль-дорога» как замкнутая система управления» ). Водитель оценивает управляемость автомобиля, исходя из собственных субъективных впечатлений. Большинство стандартизованных методик испытаний выполняется в режиме разомкнутого контура, т.е. при определенном ступенчатом входном воздействии со стороны рулевого управления без вмешательства водителя. При этом поведение автомобиля определяется без влияния стиля вождения различных водителей. Только некоторые методики выполняются в режиме замкнутого контура, т.е., когда входные воздействия осуществляются индивидуальным образом водителем.
При изучении поведения автомобиля, обычно исследуют систему «водитель — автомобиль — дорога» (см. рис. «Комплексная система «водитель-автомобиль-дорога» как замкнутая система управления» ). Водитель оценивает управляемость автомобиля, исходя из собственных субъективных впечатлений. Большинство стандартизованных методик испытаний выполняется в режиме разомкнутого контура, т.е. при определенном ступенчатом входном воздействии со стороны рулевого управления без вмешательства водителя. При этом поведение автомобиля определяется без влияния стиля вождения различных водителей. Только некоторые методики выполняются в режиме замкнутого контура, т.е., когда входные воздействия осуществляются индивидуальным образом водителем.
В настоящее время существует около 20 стандартов ISO на методики динамических испытаний, из которых я опишу следующие, наиболее часто используемые методики:
- Установившееся криволинейное движение;
- Методики испытаний в переходном режиме;
- Испытания в режиме малых колебаний и в переходном режиме;
- Торможение на кривой или в повороте.
Дополнительные методики испытаний, которые я не буду описывать:
- Двойное перестроение из ряда в ряд (в режиме замкнутого контура);
- Комбинации боковой устойчивости автомобиля;
- Устойчивость под действием бокового ветра;
- Изменения нагрузки при прохождении поворотов.
Эти методики испытаний первоначально были разработаны для легковых автомобилей. В дальнейшем на основе этих стандартов были созданы методы испытаний для тяжелых коммерческих автомобилей с их большой массой и инерцией с целью определения их уникальных характеристик поведения.
Общие граничные условия, которые должны быть в равной степени соблюдены для всех методик динамических испытаний, такие как, например, состояние дорожной поверхности, окружающие условия и состояние шин, определены в отдельном стандарте ISO, который дополнительно определяет требования к средствам измерения динамических параметров.
Количественные оценки поведения автомобиля
Для оценки поведения автомобиля в основном используются следующие измеряемые количественные параметры (рис. «Количественные динамические параметры автомобиля» ):
- Угол поворота рулевого колеса и момент, прилагаемый к рулевому колесу;
- Поперечное ускорение;
- Скорость рыскания;
- Угол крена;
- Угол дрейфа.
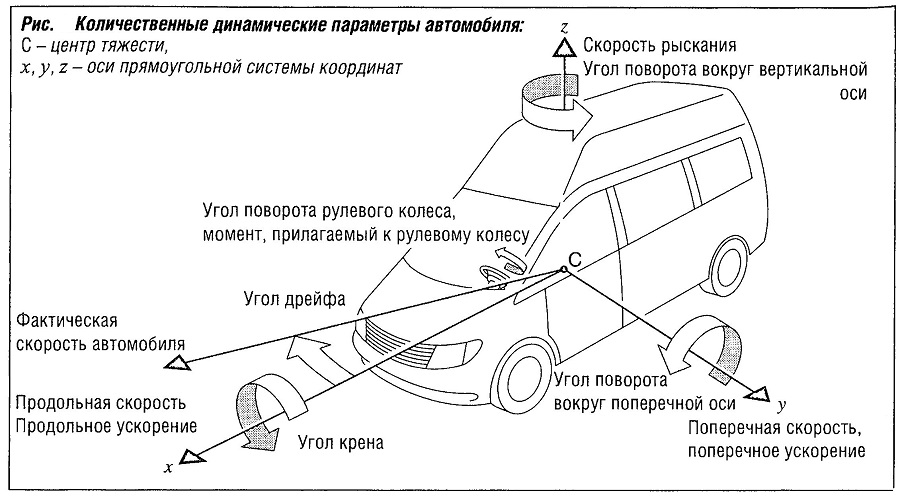
В зависимости от методики испытаний, из этих и иных количественных параметров определяются характеристические значения, служащие для описания и оценки поведения автомобиля. Эти измеряемые величины и характеристические значения определены в отдельном стандарте ISO.
Установившееся криволинейное движение
Методика испытаний «Установившееся криволинейное движение» обычно выполняется следующим образом: автомобиль разгоняется на круговой трассе с постоянным радиусом начиная с очень низкой стартовой скорости, и заканчивая максимально достижимым для данного автомобиля поперечным ускорением. Обычно для легковых автомобилей выбирается радиус 40 м, а для грузовых автомобилей — 80 м. Чтобы поведение автомобиля можно было считать установившимся, продольное ускорение не должно превышать (приблизительно) 1 м/с.
Используемыми в основном критериями оценки являются данные угла поворота рулевого колеса, угла крена и угла дрейфа, построенные в зависимости от поперечного ускорения, которые показаны на рис. «Установившееся криволинейное движение» для легкового автомобиля и грузового автомобиля с полуприцепом.
Из кривой зависимости угла поворота рулевого колеса от поперечного ускорения, используя одноколейную модель (см. главу «Динамика поперечного движения») можно определить эффект самовыравнивания. Конструкция современных автомобилей, как легковых, так и грузовых, как правило, предусматривает недостаточную поворачиваемость. Другими словами, при возрастании скорости во время движения по кривой с постоянным радиусом они требуют значительного увеличения угла поворота рулевого колеса. Предельный уровень недостаточной поворачиваемости автомобиля определяется максимальным направляющим усилием при повороте, вызывающим резкое увеличение угла поворота рулевого колеса при высоком поперечном ускорении.
Кривая зависимости угла крена от поперечного ускорения описывает боковой наклон автомобиля, который может ощущаться водителем. Угол крена также сильно зависит от нагрузки автомобиля, в особенности в случае коммерческих автомобилей. Из этого можно сделать вывод, что для коммерческих автомобилей с высоко расположенным центром тяжести, при полной загрузке, максимальное достижимое поперечное ускорение определяется не направляющими усилиями шин при повороте, а предельным моментом опрокидывания автомобиля.
В случае грузовых автомобилей угол крена дополнительно определяется не только в области центра тяжести автомобиля, но также, в связи с наличием слабой в торсионном отношении рамы и отдельного крепления водительской кабины, в нескольких фиксированных точках измерения (рис. «Установившееся криволинейное движение» ).
Кривая зависимости угла дрейфа от поперечного ускорения является показателем поперечной устойчивости автомобиля, которая может ощущаться водителем и определяется прежде всего свойствами шин.
Кроме свойств шин значительное влияние на поведение автомобиля в установившемся режиме могут оказывать следующие параметры:
- Нагрузка и распределение нагрузки между осями;
- Жесткость пружин и амортизаторов;
- Кинематические и эластокинематические перемещения компонентов подвески колес.
Переходные режимы
Методики испытаний в переходных режимах служат для определения реакций автомобиля на быстрые, динамические возмущения со стороны рулевого управления, например, во время выполнения быстрых маневров уклонения. Часто используемыми методиками испытаний и моделирования являются «Ступенчатое воздействие» и «Синусоидальное воздействие со стороны рулевого управления (частотная характеристика)».
Ступенчатое воздействие
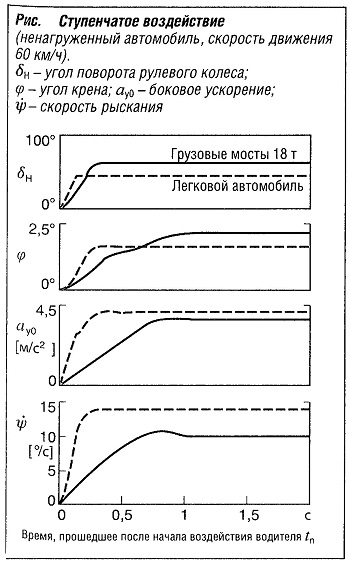 Методика испытаний «Ступенчатое воздействие» заключается в том, что автомобиль начинает двигаться в прямом направлении с постоянной скоростью, а затем рулевое колесо резко поворачивается на определенный угол и остается в этом положении. Это приводит к движению по кругу с определенным постоянным поперечным ускорением. Для легковых автомобилей скорость изменения угла поворота рулевого колеса составляет приблизительно 360о/с, а поперечное ускорение -4 м/ с2 при скорости движения 80 км/ч.
Методика испытаний «Ступенчатое воздействие» заключается в том, что автомобиль начинает двигаться в прямом направлении с постоянной скоростью, а затем рулевое колесо резко поворачивается на определенный угол и остается в этом положении. Это приводит к движению по кругу с определенным постоянным поперечным ускорением. Для легковых автомобилей скорость изменения угла поворота рулевого колеса составляет приблизительно 360о/с, а поперечное ускорение -4 м/ с2 при скорости движения 80 км/ч.
Во время этого маневра определяются временные задержки и значения перерегулирования скорости рыскания, поперечного ускорения, угла крена и угла дрейфа, при ступенчатом воздействии со стороны рулевого управления (рис. «Ступенчатое воздействие» ). С одной стороны, реакция автомобиля на это ступенчатое воздействие не должна быть слишком медленной, с другой стороны, не должно иметь место чрезмерное перерегулирование.
Синусоидальное воздействие со стороны рулевого управления (частотная характеристика)
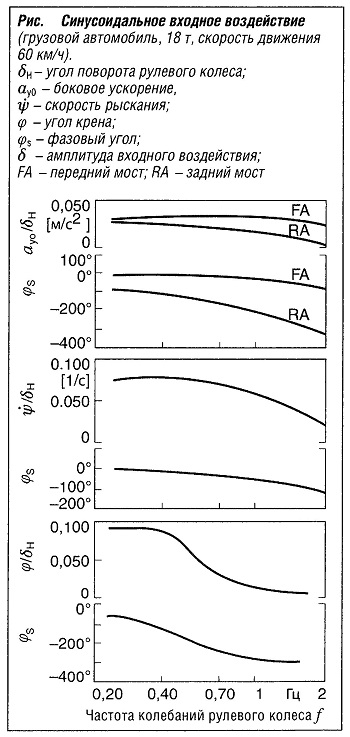 Методика испытаний «Синусоидальное воздействие со стороны рулевого управления (частотная характеристика)» заключается в том, что во время движения с постоянной скоростью автомобиль подвергается синусоидальному воздействию со стороны рулевого управления. Угол поворота рулевого колеса изменяется в соответствии с синусоидальным законом. Амплитуда сигнала остается постоянной, а частота увеличивается, начиная с медленных перемещений рулевого колеса с частотой 0,2 Гц, и заканчивая быстрыми перемещениями с частотой 2,0 Гц. Амплитуда угла поворота рулевого колеса, как правило, выбирается таким образом, чтобы автомобиль оставался в линейном диапазоне движения. Например, в случае легковых автомобилей, это должно делаться таким образом, чтобы при минимальной частоте колебаний рулевого колеса и скорости движения 80 км/ч поперечное ускорение составило не более 4 м/с2. Это дает возможность оценить поведение автомобиля во всем диапазоне частот.
Методика испытаний «Синусоидальное воздействие со стороны рулевого управления (частотная характеристика)» заключается в том, что во время движения с постоянной скоростью автомобиль подвергается синусоидальному воздействию со стороны рулевого управления. Угол поворота рулевого колеса изменяется в соответствии с синусоидальным законом. Амплитуда сигнала остается постоянной, а частота увеличивается, начиная с медленных перемещений рулевого колеса с частотой 0,2 Гц, и заканчивая быстрыми перемещениями с частотой 2,0 Гц. Амплитуда угла поворота рулевого колеса, как правило, выбирается таким образом, чтобы автомобиль оставался в линейном диапазоне движения. Например, в случае легковых автомобилей, это должно делаться таким образом, чтобы при минимальной частоте колебаний рулевого колеса и скорости движения 80 км/ч поперечное ускорение составило не более 4 м/с2. Это дает возможность оценить поведение автомобиля во всем диапазоне частот.
Для оценки поведения автомобиля определяются такие параметры, как фазовый угол, момент, прилагаемый к рулевому колесу, скорость рыскания, поперечное ускорение, угол крена и угол дрейфа и строятся графики их зависимости от частоты колебаний рулевого колеса. Значения собственных частот, угла возникающего наклона и фазовых углов могут быть использованы в качестве критериев оценки подвижности и устойчивости автомобиля под действием динамических возмущений со стороны рулевого управления. Такая оценка для грузового автомобиля массой 18 т показана на рис. «Синусоидальное входное воздействие».
Кроме параметров, влияющих на поведение автомобиля в стационарных режимах, в случае динамичных маневров основное влияние оказывают демпфирующие свойства и моменты инерции автомобиля, а также динамические свойства шин, системы рулевого управления и подвески колес.
Испытания в режиме малых колебаний и в переходном режиме
Методики «Испытания в режиме малых колебаний» и «Испытания в переходном режиме», были разработаны для определения реакций автомобиля на небольшие, медленные перемещения рулевого колеса относительно положения прямолинейного движения. Поведение автомобиля и системы рулевого управления при этом хорошо согласуется с субъективными впечатлениями водителя о контролируемости автомобиля в процессе повседневной эксплуатации.
Испытания в переходном режиме
В ходе испытаний в переходном режиме автомобиль начинает движение в прямом направлении с постоянной скоростью движения, после чего рулевое колесо медленно поворачивается в сторону (например, при скорости 80 км/ч скорость поворота рулевого колеса составляет 5°/с) до перехода в режим движения по кругу с низким поперечным ускорением от 1 до 2 м/с2. На практике это соответствует входу в поворот с низкой скоростью на второстепенной дороге.
Прежде всего выполняется оценка временных характеристик скорости рыскания и поперечного ускорения. Удобной количественной оценкой также может быть время реакции автомобиля на воздействие со стороны рулевого управления в форме рыскания, которое может ощущаться водителем.
Испытания в режиме малых колебаний
 В ходе испытаний в режиме малых колебаний автомобиль во время движения с постоянной скоростью (например, 80 км/ч) подвергается синусоидальному воздействию со стороны рулевого управления с низкой частотой от 0,1 до 0,2 Гц. При этом максимальное поперечное ускорение составляет от 2 м/с2 (для грузовых автомобилей) до 4 м/с2 (для легковых автомобилей), т.е. автомобиль постоянно находится в линейном диапазоне движения.
В ходе испытаний в режиме малых колебаний автомобиль во время движения с постоянной скоростью (например, 80 км/ч) подвергается синусоидальному воздействию со стороны рулевого управления с низкой частотой от 0,1 до 0,2 Гц. При этом максимальное поперечное ускорение составляет от 2 м/с2 (для грузовых автомобилей) до 4 м/с2 (для легковых автомобилей), т.е. автомобиль постоянно находится в линейном диапазоне движения.
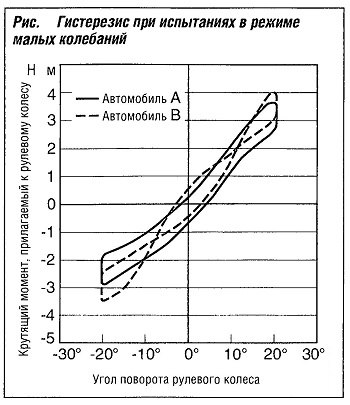
Для оценки поведения автомобиля и влияния рулевого управления используются кривые зависимости момента, прилагаемого к рулевому колесу, поперечного ускорения, скорости рыскания и угла дрейфа от угла поворота рулевого колеса. Нелинейность (среди прочего, трение) в системе рулевого управления, шинах и подвеске колес вызывает образование гистерезисных петель, которые схематично показаны на рис. 6. Амплитуды гистерезиса и градиенты наклона кривых являются удобными критериями оценки. Например, поведение автомобиля, демонстрирующего переплетающуюся петлю гистерезиса, как автомобиль «В» на рис. «Гистерезис при испытаниях в режиме малых колебаний», воспринимается водителем, как «индифферентность относительно центрального положения» и «плохая стабильность при прямолинейном движении».
Торможение на кривой или в повороте
Методика испытаний «Торможение на кривой или в повороте» также моделирует ситуацию, часто возникающую в ходе повседневного дорожного движения. Во время стационарного движения по кривой с поперечным ускорением от 3 м/с (обычное значение для грузовых автомобилей) до 5 м/с2 (обычное значение для легковых автомобилей) автомобиль тормозит с определенным замедлением, определяемым ходом педали тормоза, требуемым для его создания. 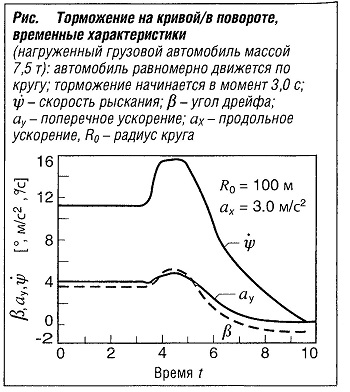 Выполняются несколько испытаний с различными значениями замедления — от легкого до максимально возможного торможения.
Выполняются несколько испытаний с различными значениями замедления — от легкого до максимально возможного торможения.
На рис. «Торможение на прямой или в повороте, временные характеристики» представлены временные характеристики скорости рыскания, бокового ускорения и угла дрейфа для грузового автомобиля массой 7,5 т вовремя торможения с замедлением 3 м/с2. После начала торможения (отметка времени 3,0 с) на графиках можно видеть резкий скачок значений динамических параметров. Графики демонстрируют, что во время торможения при постоянном угле поворота рулевого колеса, установленном до начала торможения, автомобиль имеет тенденцию к повороту внутрь кривой движения.
В качестве критерия оценки устойчивости автомобиля используется степень изменения динамических количественных параметров в зависимости от переменного продольного замедления.
Так же как параметры автомобиля, описанные выше, на поведение автомобиля во время этого маневра значительное влияние оказывает распределение тормозных сил между передней и задней осями и конструкция антиблокировочной тормозной системы ABS и системы курсовой устойчивости ESP. Большое значение также имеет настройка этих систем.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: