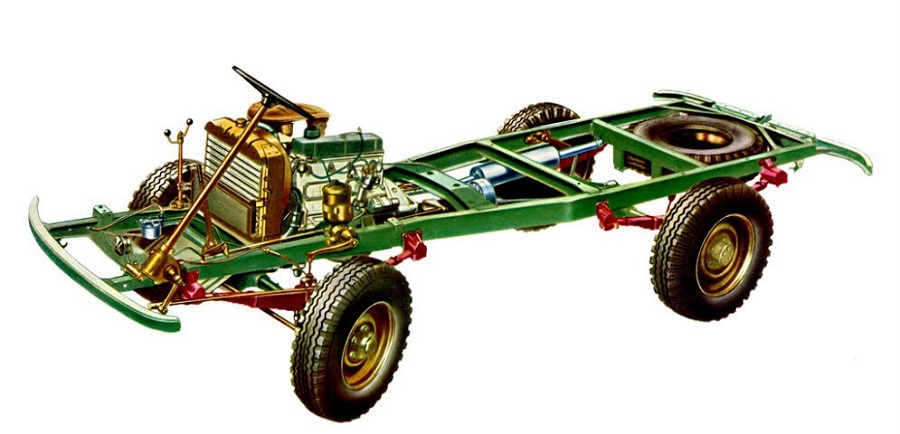
Системы шасси автомобиля — это системы, состоящие из собранных воедино узлов ходовой части, трансмиссии и механизма управления. Системы шасси является одной из самых важных частей автомобиля и предназначена обеспечить восприятие и передачу всех сил, которые действуют на него во время движения.

Базовые принципы
Дороги, обычно используемые автомобилями, имеют неровности в диапазоне частот приблизительно до 30 Гц и являются наиболее интенсивным источником возбуждения в автомобиле. Возбуждения приводят к вертикальным перемещениям (вертикальному ускорению) автомобиля и пассажиров. Промежуточным звеном между поверхностью дороги и автомобилем является система шасси, главная задача которой — передача энергии между окружающей средой и кузовом. Это означает, что и на динамические характеристики автомобиля, и на безопасность дорожного движения, а также на комфорт, сильно влияет выбор системы шасси.
Однако динамика реакции автомобиля определяется не только компонентами системы шасси, она скорее является результатом сочетания различных общих параметров автомобиля. Как правило, повлиять на динамику автомобиля за счет работы над шасси оказывается весьма сложной задачей, в частности из-за того, что эффект изменений параметров должен преобладать среди конфликтующих приоритетов — безопасности движения и комфортабельности езды.
Безопасность движения в решающей мере зависит от контактных взаимодействий между шинами и поверхностью дороги, и стало быть от передаваемых продольных и поперечных сил. Поэтому фундаментальной целью при конфигурировании системы шасси в плане безопасности движения всегда является минимизация динамический колебаний нагрузки на колёса, вызывающих снижение величину передаваемой силы.
С другой стороны, комфортабельность езды зависит от перемещений и ускорений, воздействующих на пассажиров (прежде всего, в вертикальном направлении). В зависимости от области применения комфорт имеет большую важность и ни в коем случае не должен рассматриваться как сопутствующий элемент развития системы. В частности, в случае с профессиональными водителями, достаточно высокий уровень комфорта им необходим для предотвращения вреда здоровью. В этом контексте хорошим параметром оценки зарекомендовала себя эффективная величина ускорения кузова.
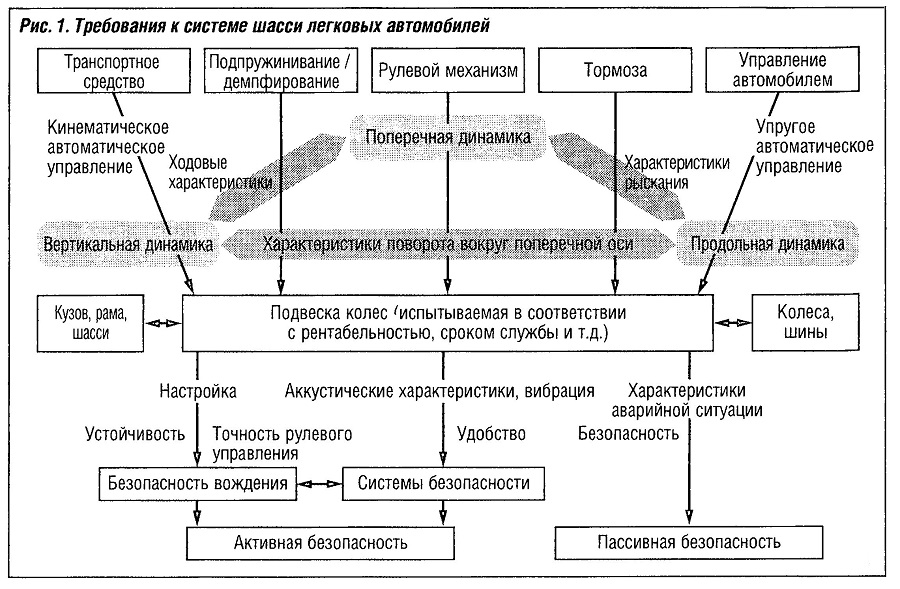
Однако эти ключевые параметры изначально лишь описывают потенциал системы шасси для соблюдения соответствующих требований. Фактическая динамика автомобиля, безопасность движения и комфорт также сильно зависят от выбора параметров дорожного покрытия (среды) и внутренних регулируемых переменных (например, угла поворота рулевого колеса или положения педали акселератора), задаваемых водителем. Фундаментальные требования к системе шасси показаны на рис. «Требования к системе шасси легковых автомобилей». Шасси как система (без электроники) традиционно подразделяется на следующие подсистемы:
- Подвеска автомобиля;
- Амортизаторы;
- Подвеска колес и рычаги подвески;
- Шины;
- Рулевое управление;
- Тормозная система.
Возбуждение, вызываемое дорогой
Прежде, чем изложить основные принципы отдельных компонентов «шасси» как системы, сначала обсудим понятие возбуждения, вызываемого дорогой, и затем — эффект возбуждения на вибрацию системы «автомобиль» в целом. Наряду с адаптацией системы колебаний к внешним возбуждениям, вызываемым дорогой, для автомобилей также требуется свести к минимуму влияние внутренних источников возбуждения на характеристики вибрации (ДВС, колеса и шины).
Знание и описание в виде оптимизируемых параметров возбуждения, являющегося причиной вибраций, требуется для изучения характеристик вибрации и настройки системы подвески и амортизаторов в системе шасси. В то время как небольшие неровности можно скомпенсировать смягчающими характеристиками шин, для уменьшения более значительных перемещений кузова между кузовом и колесами необходим элемент, изменяющий свою длину. Здесь наиболее часто используются стальные пружины, обеспечивающие возвращающую силу, зависящую от изменения длины. Результат — с учетом массы колес и кузова — система, способная вибрировать и требующая дополнительных элементов для гашения колебаний.
Виды неровностей
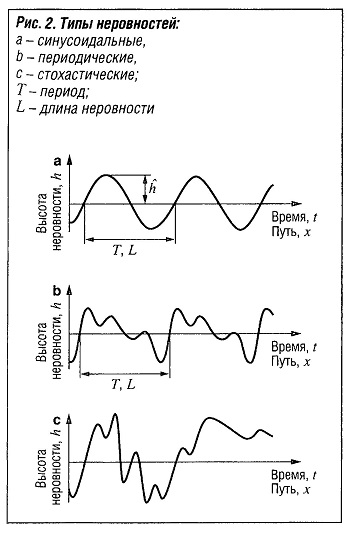 Описывая неровности на дороге в зависимости от пути или времени, мы различаем гармонические (синусоидальные), периодические и стохастические неровности (рис. «Типы неровностей»).
Описывая неровности на дороге в зависимости от пути или времени, мы различаем гармонические (синусоидальные), периодические и стохастические неровности (рис. «Типы неровностей»).
В этом случае (рис. «Типы неровностей, а»), высота неровности h в зависимости от пройденного пути х или момента времени t будет равна:
h(x) = h sin(Ωx + ԑ) , а h(t) = h sin(ωt + ԑ)
где:
h- амплитуда;
L- длина неровности;
v- скорость;
ԑ- сдвиг фазы;
Ω = 2π/L — дорожная частота;
ω = vΩ = 2πv/L- угловая частота.
Периодические неровности
На следующем этапе предполагаются не только чисто синусоидальные, но также и периодические неровности (рис. «Типы неровностей, b»). Это означает, что выражение зависимости в виде ряда Фурье (периодические функции можно описать как бесконечный ряд синусоидальных колебаний) будет иметь вид:
h(х) = h0 + Σ∞k-1 hk sin(Ωx + ԑk)
h(t) = h0 + Σ∞k-1 hk sin(ωt + ԑk)
где:
h0 — базовая амплитуда;
hk— амплитуда;
ԑk — сдвиг фазы;
ω = 2π/L — дорожная частота;
L-длина неровности.
Стохастические участки неровности
Для поверхностей реальных дорог, т.е. не только для периодических, но и случайных (стохастических) неровностей (рис. с, «Типы неровностей» ), высота неровности определяется через интеграл, соответственно перемещаясь из дискретного в непрерывный спектр:
h(x) = ∫∞-∞ h(Ω) ejΩxdΩ
с непрерывным амплитудным спектром:
h(Ω) = 1/2π ∫∞-∞ h(x) e-jΩxdx
или в диапазоне времени:
h(t) = ∫∞-∞ h(ω) ejΩtdω
где h(ω) = 1/v h(Ω)
Спектральная плотность мощности неровностей дороги
Но как правило, неровность в зависимости от пути или времени меньше подходит для теоретических исследований возбуждения, вызываемого дорогой. Значительно более интересным представляется знание среднестатистического возбуждения, возникающего при езде по определенному дорожному покрытию, в частности, в сравнении с разными покрытиями. Вот почему для оценки возбуждения в основном используется спектральная плотность мощности Фh(Ω) в зависимости от дорожной частоты и спектральная плотность мощности в зависимости от угловой частоты Фh(ω). Математическое определение и подробное обсуждение этих переменных я здесь не привожу. Для следующего исследования достаточно описательного значения спектральной плотности мощности, существующей в «энергии в бесконечно малом диапазоне частот» (относительно пути или времени) или «выхода мощности в диапазоне собственной частоты».
Учитывая, что L = vT, Фh(Ω) и Фh(ω) могут быть преобразованы друг в друга. Это можно описать уравнением:
Фh(ω) = 1/v Фh(Ω)
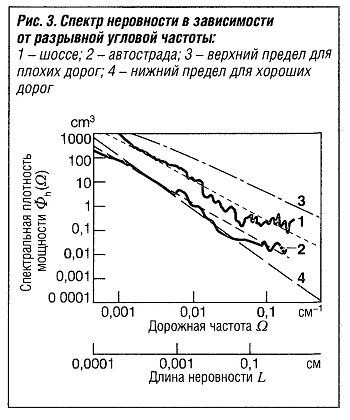 Спектральная плотность мощности определяет распределение мощности спектра возбуждения по всему спектру неровностей. Обычно это представляют на двойной логарифмической шкале (рис. «Спектр неровности в зависимости от разрывной угловой частоты»). Приближение участков спектральной плотности мощности на реальных дорожных покрытиях возможно здесь с прямыми линиями, как это видно в следующем уравнении:
Спектральная плотность мощности определяет распределение мощности спектра возбуждения по всему спектру неровностей. Обычно это представляют на двойной логарифмической шкале (рис. «Спектр неровности в зависимости от разрывной угловой частоты»). Приближение участков спектральной плотности мощности на реальных дорожных покрытиях возможно здесь с прямыми линиями, как это видно в следующем уравнении:
Фh(Ω) = Фh(Ω0) (Ω/Ω0)-w
где:
Фh(Ω0) — спектральная плотность мощности с опорной угловой частотой Ω0 (как правило, Ω0 = 1 м-1, что соответствует опорной длине волны неровности L0 = 2π/Ω0 = 6,28 м);
w — волнистость поверхности дороги (от 1,7 до 3,3; для стандартных дорог w = 2).
Если степень неровности и волнистость поверхности дороги известны, то все параметры в приведенном выше линейном уравнении заданы, и тогда его можно использовать для характеристики различных типов поверхности дороги. Степень неровности определяется как спектральная плотность мощности при опорной угловой частоте, т.е. Фh(Ω0).
Основные принципы вибрационных характеристик автомобилей
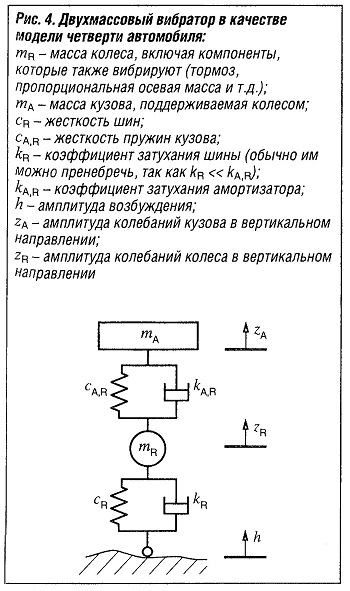 Создаваемые дорогой возбуждения воздействуют на кузов автомобиля через шины, подвеску колес и систему подвески / амортизаторов. Для теоретического анализа можно использовать вибрационные модели различной сложности. С ростом сложности модели повышается количество степеней свободы и связанных дифференциальных уравнений. Для большей ясности фундаментальные взаимосвязи в автомобильных вибрационных системах будут разъяснены на примере двухмассового вибратора (рис. «Двухмассовый вибратор в качестве четверти автомобиля»).
Создаваемые дорогой возбуждения воздействуют на кузов автомобиля через шины, подвеску колес и систему подвески / амортизаторов. Для теоретического анализа можно использовать вибрационные модели различной сложности. С ростом сложности модели повышается количество степеней свободы и связанных дифференциальных уравнений. Для большей ясности фундаментальные взаимосвязи в автомобильных вибрационных системах будут разъяснены на примере двухмассового вибратора (рис. «Двухмассовый вибратор в качестве четверти автомобиля»).
С указанием значений массы, коэффициентов упругости и коэффициентов затухания все параметры в двухмассовой модели для технического анализа вибраций заданы, и с переменными, обозначенными на рис. «Двухмассовый вибратор в качестве четверти автомобиля», можно составить два дифференциальных уравнения:
mAzA + кА,R (zA — zR) + cA,R (zA — zR) = О,
mRzR — кА,R (zA — zR) — cA,R (zA — zR) + cRzR + kR zR = cRh + kRh
Деление этих уравнений на массу в каждом случае приводит к обычному виду дифференциального уравнения 2-го порядка и дает угловую частоту свободных затухающих колебаний ωg и угловую частоту свободных незатухающих колебаний ωu, а также коэффициенты затухания для колеса DR и кузова DA.
Нижеследующее уравнение применимо к угловой частоте независимых незатухающих колебаний колеса:
ωR=√ (cR+cA,R)/ mR ≈ √ (cR / mR),при (cR ≈ 10 cA)
Нижеследующее уравнение применимо, соответственно, к кузову:
ωA=√ (cA,R / mA )
Вообще, угловая частота свободных затухающих колебаний ωg вычисляется по формуле:
ωg = ωu√ (1 — D2)
где в качестве приближения предполагается следующее: ωg≈0,9 ωu.
Нижеследующее уравнение применимо к коэффициенту затухания DR на колесе:
DR = кА,R / 2mR ωR = кА,R /2√(cR+cA,R)mR = (mAωA/mR ωR)DA
где опыт показал, что нужно ориентироваться на DR ≈ 0,4.
То же самое применимо к кузову:
DA = кА,R / 2mA ωA = кА,R /2√(cA,RmR)
В этом случае эффективность доказало значение DA≈ 0,3.
Колебания динамической нагрузки на колесо ΔG приводят к равенству:
ΔG = mRzR + mAzA = cR(h — zR) + kR (h — zR)
Вместе эти переменные образуют основу для грубой конфигурации системы подвески / амортизаторов автомобиля.
Если известны собственная частота кузова (обычно fА ≈ 1 Гц) и масса кузова (или удельная масса кузова на колесо), то можно определить жесткость пружин кузова относительно колес:
cA,R = mA ωA2
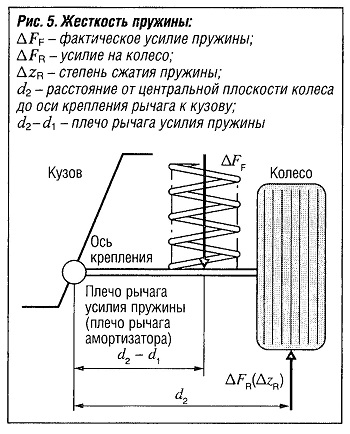 Преобразование в фактическую жесткость пружин кузова имеет место с учетом соотношения i между перемещениями колеса и пружины, (см. рис. «Жесткость пружины»). Прежде всего, фактическое усилие пружины
Преобразование в фактическую жесткость пружин кузова имеет место с учетом соотношения i между перемещениями колеса и пружины, (см. рис. «Жесткость пружины»). Прежде всего, фактическое усилие пружины
Δ FF = сА ΔzF
и усилие колеса ΔFR формулируются со сжатием пружины ΔzR . Нижеследующее уравнение применимо Δ FR:
Δ FR = cA,R ΔzR
Равновесие крутящего момента, действующего вокруг крепления рычага подвески к кузову оси, показанного на рис. «Жесткость пружины» приводит к:
cA,R ΔzR d2 = сА ΔzF ( d2 — d1)
Это уравнение можно использовать для преобразования фактической жесткости пружины сА в соответствии с геометрическими взаимосвязями с жесткостью колеса cA,R:
cA,R = сА i2
с жесткостью пружины i:
i = ( d2 — d1)/d2 = ΔzF /ΔzR
To же самое справедливо для гасителя вибраций. Для расчета коэффициента затухания вибраций кузова (его эффект на колесо), в отношении колеса применимо следующее выражение:
cA,R = 2DA√(cA,RmR)
При DA = 0,3 (см. выше) и mА, как известной переменной изучаемого автомобиля, коэффициент затухания вибраций кузова можно определить c помощью уравнения
DR = (mAωA/mR ωR)DA
оценка оптимальных соотношений между массами колеса и кузова с помощью коэффициентов затухания DR = 0,4 и DA = 0,3 (ориентиры) дает следующее соотношение:
mA/mR = 0,4ωR / 0,3ωA=0,4 fR/0,3 fA
где fR= ωR 2π и fA= ωA 2π.
При fR = 12 Гц и fA = 1 Гц результат будет следующий:
mR = 1/16 mA
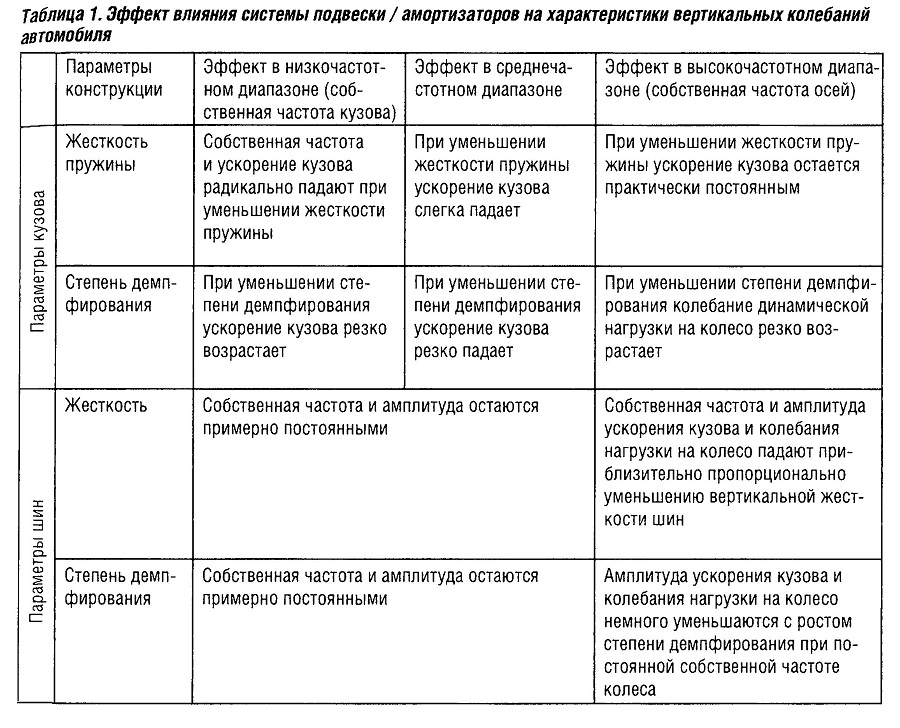
Влияние различных параметров подвески/амортизаторов на разные диапазоны частоты показано в таблице «Эффект влияния системы подвески / амортизаторов на характеристики вертикальных колебаний автомобиля».
Передаточная функция и спектральная плотность мощности ускорения кузова и колебаний нагрузки на колесо
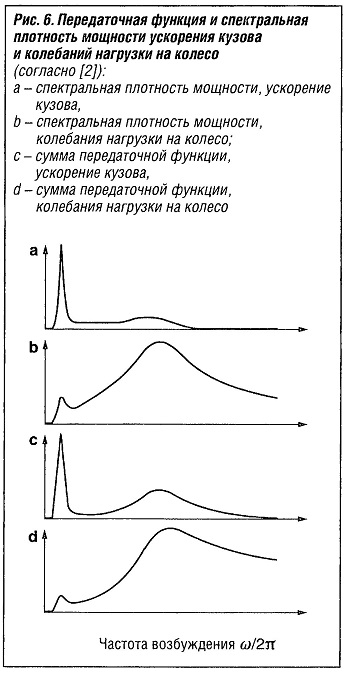 Сумма передаточной функции — это отношение амплитуды выходных переменных (ускорения кузова или колебаний нагрузки на колесо) и амплитуды входной переменной (вертикальное возбуждение, см. рис. 4). Принцип прогрессии показан на рис. с и d «Передаточная функция и спектральная плотность мощности ускорения кузова и колебаний нагрузки на колесо».
Сумма передаточной функции — это отношение амплитуды выходных переменных (ускорения кузова или колебаний нагрузки на колесо) и амплитуды входной переменной (вертикальное возбуждение, см. рис. 4). Принцип прогрессии показан на рис. с и d «Передаточная функция и спектральная плотность мощности ускорения кузова и колебаний нагрузки на колесо».
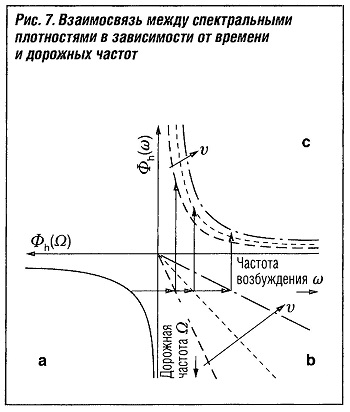
Теперь эти передаточные функции нужно привязать к неровностям дороги. Для этого предположим, что распределение неровностей дороги является функцией дорожной частоты (рис. а «Взаимосвязь между спектральными плотностями в зависимости от времени и дорожных частот»), и дорожная частота на основе скорости движения v (рис. 7b) преобразуется в угловую частоту, зависящую от времени (рис. 7с). На рис. 7с видно, что амплитуды возбуждения на низких частотах значительно больше, чем на высоких. Передаточные функции для ускорения кузова (рис. 6с) и колебаний нагрузки на колесо (рис. 6d) возводятся в квадрат и умножаются на этот спектр возбуждения. В результате получаем спектральную плотность мощности для ускорения кузова (рис. 6а) и колебаний нагрузки на колесо (рис. 6b).
Более высокие амплитуды возбуждения поверхности дороги при низких частотах увеличивают амплитуду вибрации в диапазоне частоты собственных колебаний кузова (1-2 Гц). Однако в диапазоне частоты собственных колебаний колеса (10-14 Гц) низкие амплитуды неровностей приводят к падению спектральных плотностей мощности по сравнению с передаточными функциями, а это значит, что движения кузова становятся более доминирующими, чем движения осей.
Квантификация вибраций автомобиля
 Почти сразу после появления автомобиля, в начале 20-го века были разработаны подходы к квантификации комфортабельности езды. Очень быстро было обнаружено влияние комфорта — в частности, в случае с профессиональными водителями — на хорошее физическое и психическое состояние, а также на здоровье водителя и, стало быть, на общую безопасность дорожного движения. Соответственно, были предприняты попытки вывести переменные, описывающие комфорт, и сравнить их в виде объективных коэффициентов комфорта для различных типов автомобилей и дорог. С тех пор был определен целый ряд различных методов оценки, основанных почти исключительно на сигналах ускорения в районе сиденья водителя и вокруг него. Здесь учитывается частотно-зависимая чувствительность людей к вибрациям и колебаниям, возникающим в различных положениях, имеющим различный характер и направленность (поступательная или вращательная; направления х,у,z) посредством соответствующих взвешивающих частотных фильтров.
Почти сразу после появления автомобиля, в начале 20-го века были разработаны подходы к квантификации комфортабельности езды. Очень быстро было обнаружено влияние комфорта — в частности, в случае с профессиональными водителями — на хорошее физическое и психическое состояние, а также на здоровье водителя и, стало быть, на общую безопасность дорожного движения. Соответственно, были предприняты попытки вывести переменные, описывающие комфорт, и сравнить их в виде объективных коэффициентов комфорта для различных типов автомобилей и дорог. С тех пор был определен целый ряд различных методов оценки, основанных почти исключительно на сигналах ускорения в районе сиденья водителя и вокруг него. Здесь учитывается частотно-зависимая чувствительность людей к вибрациям и колебаниям, возникающим в различных положениях, имеющим различный характер и направленность (поступательная или вращательная; направления х,у,z) посредством соответствующих взвешивающих частотных фильтров.
Широко используются два подхода-Директива VDI 2057 и стандарт ISO 2631. Эти методы анализа, несмотря на относительно низкие затраты по сравнению с другими, имеют большое информативное значение. В то же время, они образуют основу для многих других подходов к оценке комфорта, разработанных в 90-е годы и позднее. В используемых до сих пор методах ускорения, вызываемые возбуждением в различных точках измерения (положениях инициации), обычно служат для определения коэффициента общего комфорта (например, на основе нескольких частичных коэффициентов комфорта в различных точках измерения), т.е. измерения нагрузки на пассажиров. Ускорения являются прежде всего частотно- взвешиваемыми (т.е. амплитуды различных частот привязаны к частотно-зависимым коэффициентам) и впоследствии приводятся к какому-то значению, например, по методу среднеквадратических значений RMS в соответствии со следующим уравнением:
aRMS= √ (1/T ∫T0 aw2(t) dt )
или по методу среднеквадратических значений RMQ (корень четвертой степени, в соответствии со следующим уравнением:
aRMQ= 4√ (1/T ∫T0 aw4(t) dt )
В зависимости от количества оцениваемых точек измерения в последующей операции должен формироваться общий коэффициент. Для Директивы VDI 2057 имеет отношение только оценка точки измерения с наибольшей нагрузкой. Все поступательные ускорения этого положения инициации (рука, сиденье или нога) в одинаковой мере учитываются в расчете коэффициента. Однако для взвешивания отдельных положений инициации пока не разработано никаких единых спецификаций. Причина этого кроется в том, что многие общие условия предметных испытаний определяли правило суммирования для общего коэффициента комфорта, образуемого из частичных коэффициентов комфорта, сильно отличавшихся друг от друга.
Для обеспечения сопоставимости коэффициентов отдельных методов расчета общий коэффициент комфорта часто стандартизируется по стандартной шкале VDI. В то же время, объективным коэффициентам присваиваются вербализованные уровни интенсивности нагрузки (в помощь оценке предметов испытаний).
Разница между отдельными методами оценки комфорта кроется в основном в количестве оцениваемых точек измерения, в спецификации расчета для образования частичного коэффициента комфорта из сигнала временного ускорения (метод RMS и RMQ) и, наконец, в рассеянном взвешивании различных сигналов ускорения при слиянии для образования общего коэффициента комфорта. К тому же еще окончательно не прояснён вопрос касательно частотного взвешивающего фильтра, используемого в зависимости от точки измерения. Функции взвешивания частоты, большинство из которых определены эмпирическим путем, сильно отличаются друг от друга, особенно в низкочастотных диапазонах (ниже 1 Гц).
Эксперты также критикуют тот факт, что при группировании различных типов ускорения и направлений для образования отдельного коэффициента комфорта происходит потеря информации. Это означает, что при определенных обстоятельствах такие эффекты, как рост одного частичного коэффициента с одновременным уменьшением других частичных коэффициентов в одной и той же точке измерения (например, другого направления) и результирующее компенсаторное влияние на общий показатель комфорта останутся не выявленными. Этого можно избежать путем оценки временных прогрессий частотно- оцениваемых ускорений непосредственно перед образованием частичного показателя комфорта.
Меры по минимизации вибрации
Создаваемые дорогой возбуждения приводят к вибрации осей и кузова автомобиля. Ее следует избегать путем минимизации колебаний динамической нагрузки на колесо (безопасность движения) и ускорений кузова (комфортабельность езды). Они уменьшаются с помощью соответствующих компонентов в подвеске колеса, при этом в зависимости от области применения свою эффективность доказали различные системы подвески, амортизации и рычагов.
Для решения этих задач традиционно используются пружины и амортизаторы кузова. В сочетании с кинематикой и эластокинематикой в подвеске колес, настраиваемыми в соответствии с потребностями, они призваны обеспечить оптимальную передачу сил между шинами и дорожным покрытием и, одновременно, высокий уровень комфорта.
Однако с распространением актюаторов в системах шасси (например, рулевое управление с наложением или векторизация крутящего момента) возрастает важность затрат на оптимизацию подсистем. Одной из наиболее важных причин этого является рост добавочной стоимости продукта из-за низкой стоимости интеграции функций со стороны программного обеспечения (т.е. полной реализации различных функций различных подсистем в программной среде без необходимости увеличения технологических затрат). Кроме того, можно значительно увеличить техникоэкономический синергетический потенциал в системе автомобиля в целом и улучшить потенциал дифференцирования различных производных с помощью одних и тех же электронных и программных модулей. Это означает, что электроника и программное обеспечение приобретают всё большую важность в области систем шасси, требуя междисциплинарного взаимодействия между аппаратной частью, электроникой и разработчиками ПО на очень ранних стадиях разработки для обеспечения эффективной и не затратной разработки мехатронных систем, особенно там, где безопасность движения является критичной.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: