Рулевое управление автомобиля, это система управления направлением движения с помощью рулевого колеса. Рулевое управление представляет собой совокупность узлов и механизмов, предназначенных для синхронизации положения рулевого колеса и угла поворота управляемых колес. Вот о том, из каких узлов состоит современное рулевое управление автомобиля, мы и поговорим в этой статье.

- Классификация системы рулевого управления
- Требования к системе рулевого управления
- Типы рулевых механизмов автомобиля
- Рулевое управление с усилителем для легковых автомобилей
- Рулевое управление с усилителем для грузовых автомобилей
Классификация системы рулевого управления
Системы рулевого управления можно классифицировать следующим образом:
Мускульная система рулевого управления
Необходимые усилия рулевого управления генерируются исключительно мускульной энергией водителя. Эти системы рулевого управления в настоящее время используются в самых маленьких легковых автомобилях.
Система рулевого управления с усилителем
Усилия рулевого управления генерируются мускульной энергией водителя и вспомогательной силой, реализуемой гидравлически и в последнее время все чаще электрически. Эта система рулевого управления в настоящее время используется в легковых и грузовых автомобилях.
Система автоматизированного рулевого управления
Усилия рулевого управления генерируются исключительно не мускульной (внешней) энергией (например, в машинах).
Фрикционная система рулевого управления
Усилия рулевого управления создаются силами, воздействующими на контактное пятно шины. Примером такой системы могут служить поддерживающие мосты в грузовиках. Передача рулевых и вспомогательных сил происходит механически, гидравлически или электрически либо сочетаниями этих трех компонентов.
Требования к системе рулевого управления
Система рулевого управления преобразует создаваемые водителем вращательные движения рулевого колеса в изменение угла поворота управляемых колес автомобиля. Конструкция и схема системы призваны обеспечить удобное и безопасное рулевое управление автомобиля во всех ситуациях и на всех скоростях. Вся система рулевого управления, от рулевого колеса и до управляемых колес, должна в этих целях обладать следующими свойствами.
Передача инициируемых водителем рулящих движений на рулевом колесе без люфта особенно важна при движении по прямой. Это гарантирует безопасное, неутомительное для водителя управление автомобилем, прежде всего на средних и высоких скоростях.
Поэтому рулевой механизм должен быть очень жестким. Это необходимо для обеспечения точной управляемости и преодоления отклонения от заданного угла поворота рулевого колеса под действием изменяющихся возвратных сил, возникающих, например, при изменении бокового ускорения.
Слабое трение в рулевом механизме позволяет водителю получать через реактивные силы тактильную обратную связь, дающую информацию о коэффициенте сцепления между дорогой и шинами. Слабое трение также помогает колесам выровняться для движения по прямой. В системах рулевого управления с мускульной энергией слабое трение обеспечивает небольшие движущие силы. В системах рулевого управления с усилителем оно повышает эффективность управления.
Кинематические параметры рулевого управления и конструкция управляемой оси автомобиля должны быть такими, чтобы водитель мог чувствовать величину сцепления между шинами и дорогой.
Требования к рулевому управлению
Требованиями к функционированию системы рулевого управления являются:
Легкое, безопасное рулевое управление автомобилем. Сюда, к примеру, относится тенденция рулевого управления автоматически возвращаться в положение прямолинейного движения при отпускании руля.
Максимально возможное демпфирование колебаний, передаваемых от колес автомобиля на рулевое колесо при движении по неровным дорогам. Но этот процесс не должен приводить к потере обратной связи в рулевом управлении.
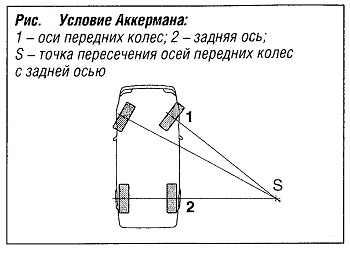 Для обеспечения чистого качения колес и, соответственно, предотвращения их избыточного износа вся рулевая кинематика должна удовлетворять условию Аккермана. Это означает, что оси управляемых колес должны пересекаться в одной точке с осью задних колес (рис. «Условие Аккермана» ).
Для обеспечения чистого качения колес и, соответственно, предотвращения их избыточного износа вся рулевая кинематика должна удовлетворять условию Аккермана. Это означает, что оси управляемых колес должны пересекаться в одной точке с осью задних колес (рис. «Условие Аккермана» ).
Достаточно жесткая схема всех компонентов рулевого механизма означает, что даже малые инициируемые водителем рулевые движения преобразуются в изменение направления управляемых колес, обеспечивая безопасную и точную управляемость автомобиля.
Угол поворота рулевого колеса от упора до упора по соображениям комфорта должен быть как можно меньше при парковке и движении с небольшой скоростью. Однако на средних и высоких скоростях рулевое управление не должно быть столь чувствительным.
Требования законодательства, предъявляемые к системам рулевого управления автомобилей
Требования законодательства, предъявляемые к системам рулевого управления автомобилей, описаны в международных правилах ECE-R79. К этим требованиям, наряду с базовыми функциональными требованиями, относятся максимально допустимые управляющие силы для исправной и неисправной систем рулевого управления. Эти требования регламентируют прежде всего поведение автомобиля и рулевого управления при въезде на круг и выезде с круга. Для автомобилей всех категорий: после отпускания рулевого колеса при движении автомобиля по окружности на скорости 10 км/ч, радиус поворота автомобиля должен увеличиться или как минимум остаться тем же.
Для автомобилей категории М1 (легковые автомобили с числом посадочных мест до 8): когда автомобиль в тангенциальном направлении выезжает из круга с радиусом 50 м на скорости 50 км/ч, в системе рулевого управления не должно возникать никаких необычных вибраций. В автомобилях категорий М2, М3, N1, N2 и N3 это поведение должно демонстрироваться на скорости 40 км/ч или, если это значение не достигается, то на максимальной скорости.
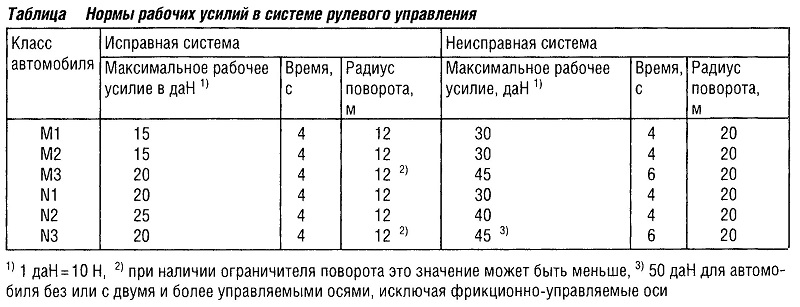
Это поведение также предписывается в случае неисправности у автомобилей с гидро- или электроусилителем рулевого управления. У автомобилей категории М1 это должно быть возможно в случае отказа сервопривода рулевого управления для въезда со скоростью 10 км/ч в течение 4 секунд в круг радиусом 20 м. Управляющее усилие на рулевом колесе не должно превышать 30 даН (табл. «Нормы рабочих усилий в системе рулевого управления» ).
Типы рулевых механизмов автомобиля
Требования к системе рулевого управления дали развитие прежде всего двум фундаментальным типам рулевых механизмов. Оба типа можно использовать в системах с чисто мускульной энергией или (в сочетании с соответствующими сервосистемами) в системах с усилителем рулевого управления.
Реечный рулевой механизм
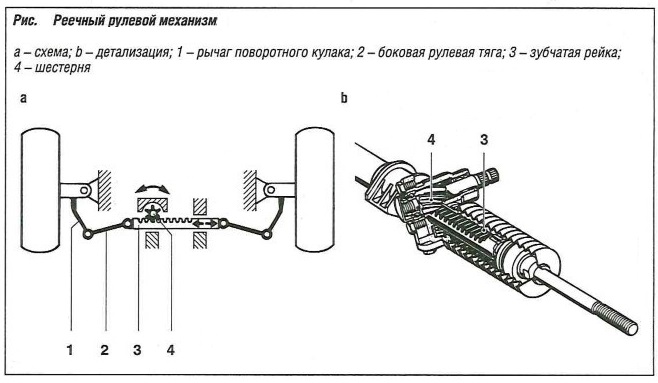
В принципе, как следует из названия, реечный рулевой механизм состоит из шестерни и зубчатой рейки (рис. «Реечный рулевой механизм» ). Передаточное отношение механизма определяется отношением числа оборотов шестерни, равного числу оборотов рулевого колеса, к перемещению рейки.
В качестве альтернативы постоянному передаточному числу рейки на рейке за счет соответствующей нарезке зубьев имеется возможность изменять это число в зависимости от длины хода. Таким образом, устойчивость при движении автомобиля по прямой можно улучшить посредством непрямого передаточного числа вокруг центра рулевого управления. В то же время, это возможно с реализацией прямого передаточного числа в диапазоне средних и больших углов поворота (например, при парковке) для уменьшения необходимого угла поворота при повороте рулевого колеса от упора до упора.
Рулевой механизм типа «винт-шариковая гайка-сектор»
 Усилия, возникающие между винтом и гайкой рулевой передачи, передаются через ряд рециркулирующих шариков, снижающих трение (рис. «Рулевой механизм с шариковой гайкой» ). Гайка воздействует на вал сошки через зубчатый сектор. Этот рулевой механизм также позволяет получать переменное передаточное отношение.
Усилия, возникающие между винтом и гайкой рулевой передачи, передаются через ряд рециркулирующих шариков, снижающих трение (рис. «Рулевой механизм с шариковой гайкой» ). Гайка воздействует на вал сошки через зубчатый сектор. Этот рулевой механизм также позволяет получать переменное передаточное отношение.
Повышение эффективности рулевого управления с зубчатой рейкой означает, что рулевой механизм с шариковой гайкой практически больше не используется в легковых автомобилях.
Рулевое управление с усилителем для легковых автомобилей
Увеличение размеров и массы автомобилей и повышение требований к комфорту и безопасности в последние годы привело к тому, что рулевое управление с усилителем появилось на всех категориях легковых автомобилей, вплоть до компактных. Эти системы, за редким исключением, устанавливаются в базовой комплектации. Усилия водителя по рулению поддерживаются гидравлической или электрической сервосистемой. Эта сервосистема должна быть такой, чтобы водитель постоянно получал четкую обратную связь о сцеплении шин с дорогой, и чтобы эффективно гасились негативные воздействия, вызываемые неровностями дороги.
Системы рулевого управления с гидравлическим усилителем
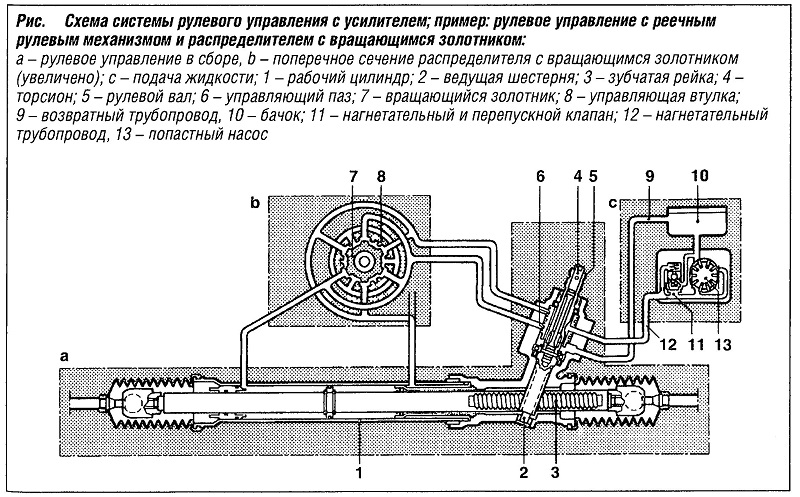
Сочетание механической конструкции рулевого механизма с гидравлической сервосистемой привело к созданию реечного рулевого механизма с усилителем (рис. «Схема системы рулевого управления с усилителем» ) и рулевой механизм с шариковой гайкой с усилителем.
Распределительный клапан рулевой системы
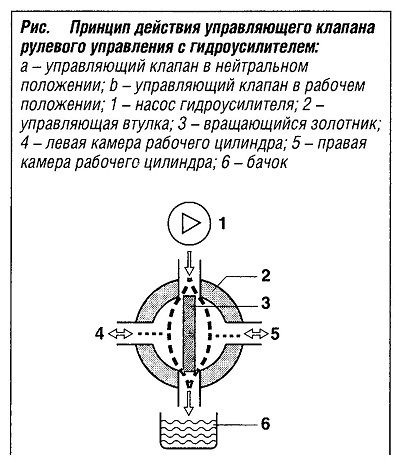
Служит для нагнетания в силовой цилиндр гидравлической жидкости под таким давлением, которое соответствует углу поворота рулевого колеса (рис. «Принцип действия управляющего клапана рулевого управления с гидроусилителем» ). Упругий датчик крутящего момента, обычно торсион («Схема системы рулевого управления с усилителем» ) обеспечивает преобразование момента на рулевом колесе при отсутствии люфта в пропорциональное этому моменту прецизионное управляющее перемещение золотника. Перемещение золотника вызывается поворотным скольжением относительно управляющей втулки. Каналы золотника, которые выполнены в форме паза, в результате управляющего перемещения образуют отверстия соответствующего поперечного сечения для пропуска жидкости.
 |
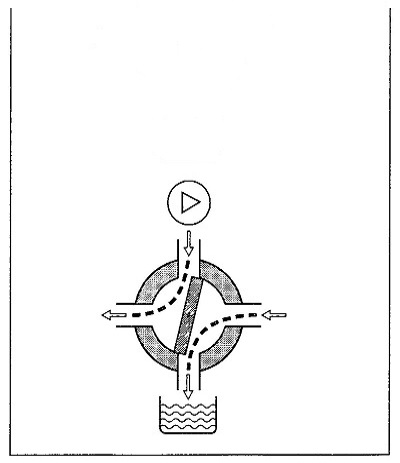 |
Распределительные клапаны обычно работают в соответствии с так называемым принципом «открытого центра», т.е. когда распределительный клапан не действует, жидкость, подаваемая насосом, перепускается обратно в бачок при нулевом давлении.
Характеристики рулевого управления с усилителем
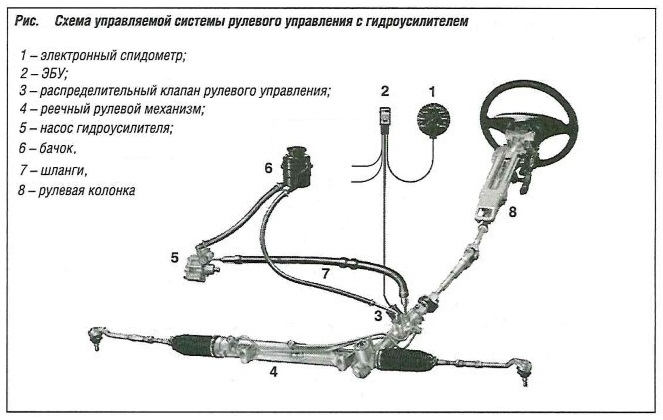
Растущие требования к удобству и безопасности привели к появлению управляемых систем рулевого управления с усилителем.  Одним из примеров является управляемая электроникой реечная система рулевого управления с усилителем (рис. «Схема управления системы рулевого управления с гидроусилителем» ). В зависимости от скорости движения автомобиля, замеряемой посредством электронного спидометра, изменяется сила, воздействующая на рулевое управление (рис. «Характеристические кривые системы рулевого управления с усилителем» ). ЭБУ анализирует скорость и определяет уровень гидравлической обратной связи и, соответственно, необходимое рабочее усилие на рулевом колесе. Этот уровень гидравлической реакции передается на распределительный клапан системы рулевого управления через электрогидравлический конвертер, который модифицирует гидравлическую реакцию относительно скорости автомобиля.
Одним из примеров является управляемая электроникой реечная система рулевого управления с усилителем (рис. «Схема управления системы рулевого управления с гидроусилителем» ). В зависимости от скорости движения автомобиля, замеряемой посредством электронного спидометра, изменяется сила, воздействующая на рулевое управление (рис. «Характеристические кривые системы рулевого управления с усилителем» ). ЭБУ анализирует скорость и определяет уровень гидравлической обратной связи и, соответственно, необходимое рабочее усилие на рулевом колесе. Этот уровень гидравлической реакции передается на распределительный клапан системы рулевого управления через электрогидравлический конвертер, который модифицирует гидравлическую реакцию относительно скорости автомобиля.
Определенные характеристики усилителя рулевого управления позволяют поворачивать рулевое колесо с минимальным усилием при стоящем автомобиле или вовремя его движения с небольшой скоростью. Степень усиления снижается с повышением скорости движения. Таким образом, при движении с высокими скоростями обеспечивается возможность управления поворотами автомобиля в оптимальном режиме.
При такой системе важно, что давление и расход гидравлической жидкости никогда не снижаются и поэтому эти параметры могут быть немедленно востребованы в критических ситуациях управления.
Рабочий цилиндр рулевой системы
Силовой цилиндр двойного действия преобразует давление гидравлической жидкости во вспомогательное усилие, воздействующее на рейку и усиливающее воздействие водителя на рулевое колесо. Этот цилиндр обычно размещается внутри картера рулевого механизма и характеризуется низким трением. Поскольку цилиндр должен иметь крайне низкое трение, то особо высокие требования предъявляются к поршню и уплотнениям штока.
Подача жидкости гидроусилителя руля
Подача жидкости осуществляется насосом (обычно приводимым от двигателя автомобиля), который соединен с бачком посредством шлангов и трубок. Насос должен быть рассчитан на нагнетание необходимого давления и объема гидравлической жидкости для выполнения парковки даже на холостых оборотах двигателя.
Для защиты от перегрузок в системе рулевого управления требуется клапан ограничения давления. Этот клапан обычно встраивается в насос. Конструкция насоса должна обеспечивать такой режим работы, чтобы рабочая температура гидравлической жидкости не поднималась выше предельного уровня, отсутствовал шум при работе насоса и не образовывалась пена в используемой жидкости.
Насос для усиления рулевого управления может также иметь привод от электродвигателя. Здесь обычно используется шестеренчатый или роторный насос. Из-за ограниченной мощности электрической системы автомобиля эти системы используются в основном в автомобилях классов А и В. Поскольку необходимость в ременном приводе от ДВС отпадает, то насос можно устанавливать произвольно, что благоприятствует модульной конструкции автомобиля. Управляющая электроника и анализ сигналов, например, скорости автомобиля и скорости руления, позволяют адаптировать частоту вращения вала насоса к текущему энергопотреблению рулевого управления и ситуации на дороге в целях экономии энергии.
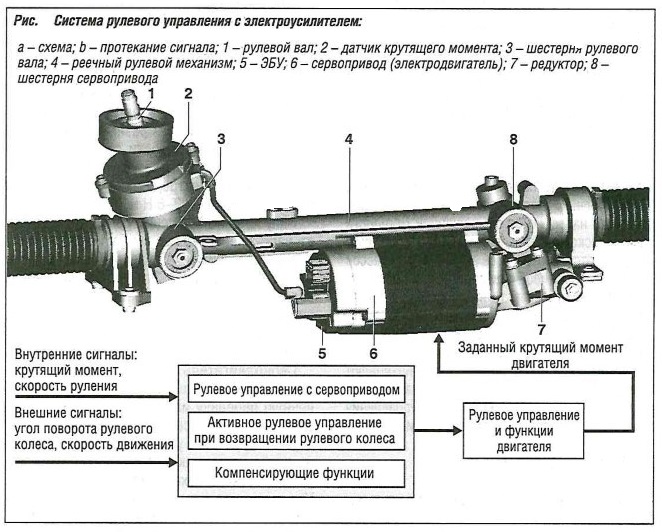
Системы рулевого управления с электроусилителем
Системы рулевого управления с электромеханическим усилителем также используются в легковых автомобилях среднего и малого классов. Такие системы имеют электродвигатель, работающий от бортовой сети. Механическое соединение электродвигателя и рулевого механизма может быть реализовано в виде рулевой колонки и привода. Система состоит из следующих компонентов (рис. «Схема рулевого управления с электроусилителем» ):
- Рулевая колонка, соединяющая шестеренку рулевого механизма с рулевым колесом автомобиля;
- Шестерня, преобразующая вращательное рулевое движение в линейное перемещение зубчатой рейки;
- Зубчатая рейка, соединенная с колесами через тяги и рычаги;
- Датчики, регистрирующие информацию для вычисления необходимого дополнительного крутящего момента на шестерне;
- Серво-блок, состоящий из ЭБУ и серводвигателя (электродвигателя), генерирующего дополнительный крутящий момент на шестерне.
Когда водитель поворачивает рулевое колесо, датчик регистрирует прилагаемый крутящий момент и отправляет эту информацию в виде электрического сигнала (аналогового или цифрового) на ЭБУ. ЭБУ вычисляет дополнительный крутящий момент и на основании вычисленного значения активирует серводвигатель. В настоящее время в качестве серводвигателей используются коллекторные или бесщеточные электродвигатели постоянного тока или трехфазные асинхронные двигатели. В зависимости от необходимых характеристик рулевого управления создаваемый этими электродвигателями крутящий момент составляет 3-6 Н-м.
Направление вращения двигателя зависит от направления вращения рулевого колеса. Возвратное движение рулевого колеса также может быть усилено. Это происходит, когда водитель выходит из поворота. В этой ситуации серводвигатель создает крутящий момент, поддерживающий обратное вращение рулевого колеса в положение движения по прямой.
Серводвигатель передает этот поддерживающий крутящий момент через червячную передачу или механизм типа «винт- шариковая гайка-сектор». В зависимости от варианта рулевого управления он передается на рулевую колонку, шестерню и зубчатую рейку реечного механизма.
Управляющая электроника учитывает различные сигналы и параметры, например, скорость движения, угол поворота рулевого колеса, крутящий момент на рулевой колонке и скорость руления. С помощью других расположенных в автомобиле датчиков и благодаря объединению в сеть ЭБУ рулевого управления с другими ЭБУ, эту систему рулевого управления можно использовать для реализации вспомогательных функций, повышающих комфорт и безопасность движения.
Ориентированное на потребности управление электродвигателем позволяет достичь значительной экономии топлива, в среднем на 0,3 л /100 км по сравнению с гидроусилителем, насос которого приводится в действие от ДВС. В городском цикле экономия топлива возрастает до 0,7 л /100 км.
В случае сбоя энергоснабжения или усиления рулевого управления водитель может продолжить руление чисто механически, но с большими мускульными затратами.
Рулевое управление с наложением угла поворота рулевого колеса
 В системе рулевого управления с наложением угол поворота рулевого колеса может увеличиваться или уменьшаться на определенную величину. Эта система обычно комбинирует с управляемой системой рулевого управления с электро- или гидроусилителем. Рулевое управление с наложением угла поворота рулевого колеса не обеспечивает автономной езды, но оптимально адаптирует характеристики рулевого управления к ситуации движения, обеспечивая максимальный комфорт и курсовую устойчивость. При объединении в сеть системы управления с динамическими параметрами такое рулевое управление может еще больше повысить безопасность в критических ситуациях дорожного движения посредством не зависящих от водителя регулировок рулевого управления. Такие системы рулевого управления уже производятся серийно под торговыми марками Active Steering (BMW) и Dynamic Steering (Audi).
В системе рулевого управления с наложением угол поворота рулевого колеса может увеличиваться или уменьшаться на определенную величину. Эта система обычно комбинирует с управляемой системой рулевого управления с электро- или гидроусилителем. Рулевое управление с наложением угла поворота рулевого колеса не обеспечивает автономной езды, но оптимально адаптирует характеристики рулевого управления к ситуации движения, обеспечивая максимальный комфорт и курсовую устойчивость. При объединении в сеть системы управления с динамическими параметрами такое рулевое управление может еще больше повысить безопасность в критических ситуациях дорожного движения посредством не зависящих от водителя регулировок рулевого управления. Такие системы рулевого управления уже производятся серийно под торговыми марками Active Steering (BMW) и Dynamic Steering (Audi).
Угловое наложение, не зависящее от задаваемого водителем угла поворота рулевого колеса, в настоящее время реализуется двумя техническими решениями.
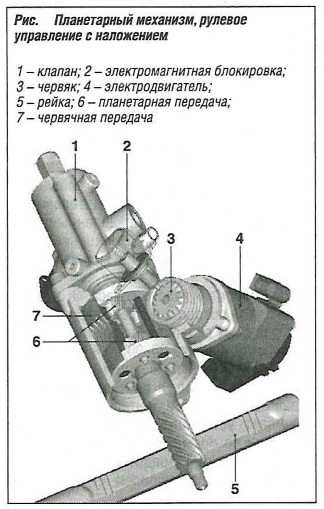
Планетарный механизм рулевой системы
Двойной планетарный механизм с различными передаточными числами встроен в общее водило планетарной передачи в рулевом механизме (рис. «Планетарный механизм, рулевое управление с наложением» ). Это означает постоянное наличие механической связи между рулевым колесом и управляемыми колесами.
Разные передаточные числа означают, что при повороте водила планетарной передачи задается дополнительный угол поворота. Угол задается электродвигателем, вращающим червячное колесо-водило планетарной передачи.
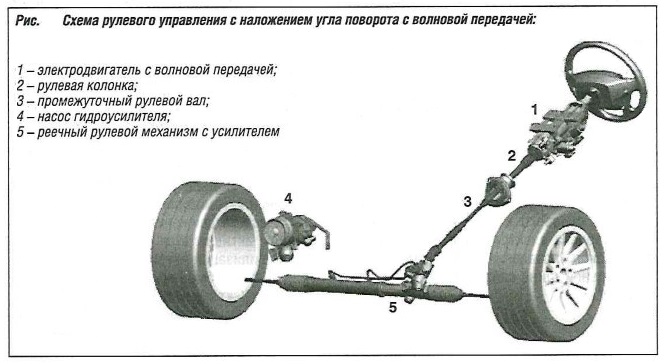
Волновая зубчатая передача с гибким звеном
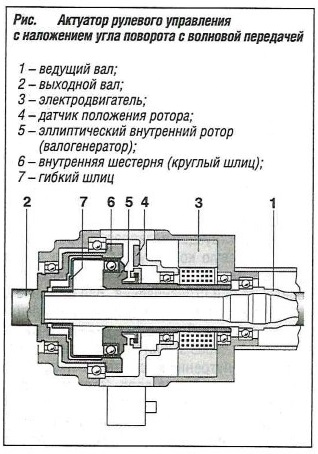 Блок наложения угла поворота (рис. «Схема рулевого управления с наложением угла поворота с волновой передачей» ) в этом случае состоит из волновой зубчатой передачи с гибким звеном и электродвигателя с полым валом (рис. «Актуатор рулевого управления с наложением угла поворота с волновой передачей» ). Очень компактная конструкция позволяет встроить этот блок в рулевую колонку без ущерба таким параметрам, как монтажное пространство и поведение при столкновении. Вал на конце с рулевым колесом положительно соединен с гибким шлицем. Поворотное движение рулевого колеса через зубчатое зацепление передается на внутреннюю шестерню (круговой шлиц) для выходного вала. Эллиптический внутренний ротор (валогенератор), размещенный в гибком шлице, приводимый электродвигателем, генерирует наложенный угол поворота через разное количество зубьев между гибким и круговым шлицами. Здесь также имеется постоянная механическая связь между рулевым колесом и управляемыми колесами через зубчатое зацепление волновой передачи.
Блок наложения угла поворота (рис. «Схема рулевого управления с наложением угла поворота с волновой передачей» ) в этом случае состоит из волновой зубчатой передачи с гибким звеном и электродвигателя с полым валом (рис. «Актуатор рулевого управления с наложением угла поворота с волновой передачей» ). Очень компактная конструкция позволяет встроить этот блок в рулевую колонку без ущерба таким параметрам, как монтажное пространство и поведение при столкновении. Вал на конце с рулевым колесом положительно соединен с гибким шлицем. Поворотное движение рулевого колеса через зубчатое зацепление передается на внутреннюю шестерню (круговой шлиц) для выходного вала. Эллиптический внутренний ротор (валогенератор), размещенный в гибком шлице, приводимый электродвигателем, генерирует наложенный угол поворота через разное количество зубьев между гибким и круговым шлицами. Здесь также имеется постоянная механическая связь между рулевым колесом и управляемыми колесами через зубчатое зацепление волновой передачи.
В пассивном состоянии электродвигатель блокируется электромеханической блокировкой, обеспечивая прямой механический сквозной привод для рулящего движения.
Концепция активации рулевого управления автомобиля
ЭБУ рулевого управления с наложением угла поворота проверяет правдоподобность необходимой информации датчика и анализирует. Он вычисляет заданный угол для электродвигателя и через встроенный задающий каскад генерирует сигналы широтно-импульсной модуляции для активации электродвигателя, который представляет собой бесщеточный электродвигатель постоянного тока со встроенным датчиком положения ротора. Максимальный ток электродвигателя составляет 40 А при напряжении бортовой сети 12 В. Датчик положения ротора позволяет блоку управления регулировать электронную коммутацию и, соответственно, направление вращения ротора. Он также вычисляет и проверяет суммарный заданный дополнительный угол поворота с помощью алгоритма суммирования в программном обеспечении блока управления.
Эффективный угол поворота, сумма угла поворота рулевого колеса и наложенного угла поворота электродвигателя вычисляются блоком управления и передаются по автомобильной шине связи на соответствующие ЭБУ.
Заданное значение эффективного угла поворота
Заданное значение эффективного угла поворота, формируемое в ЭБУ рулевого управления с наложением угла поворота состоит из частичного заданного значения для комфортабельности рулевого управления и частичного заданного значения для стабилизации автомобиля. Сигналы, необходимые для вычисления этих переменных, считываются блоком управления по шине CAN.
Частичное заданное значение для комфортабельности рулевого управления представляет собой зависимое от скорости движения переменное передаточное отношение рулевого управления. Это значение вычисляется из скорости движения автомобиля и угла поворота рулевого колеса. Когда автомобиль неподвижен или движется с небольшой скоростью, к задаваемому водителем углу поворота добавляется определенный угол. Это делает передаточное отношение более чувствительным. Водитель может полностью повернуть колеса менее чем за один полный оборот рулевого колеса. Этот добавочный угол поворота непрерывно уменьшается с ростом скорости движения. Начиная со скорости порядка 80-90 км/ч из задаваемого водителем угла поворота вычитается определенный угол, и рулевое управление становится менее чувствительным. Это обеспечивает устойчивость автомобиля при движении по прямой на высокой скорости и в то же время предотвращает потерю управления над автомобилем из-за слишком резкого руления.
Для вычисления частичного заданного значения для стабилизации автомобиля — в дополнение к углу поворота и скорости движения — перемещение автомобиля измеряется с помощью датчиков угловой скорости поворота вокруг вертикальной оси и бокового ускорения. В системе рулевого управления с наложением используются датчики системы курсовой устойчивости. Как же, как и ESP, запускаемая в ЭБУ вычислительная модель рассчитывает эталонное движение автомобиля. В случае отклонения фактического движения автомобиля от эталонного активируется рулевое управление для стабилизации автомобиля. Обе системы непрерывно обмениваются информацией, чтобы эффект взаимодействия контроллеров ESP и системы рулевого управления с наложением угла поворота был оптимальным.
Концепция безопасности рулевого управления
Все используемые внутренние и внешние сигналы непрерывно контролируются блоком управления, проверяется их правдоподобность. Если сигнал датчика больше не кажется правдоподобным, то дополнительная функция рулевого управления, на базе которой работает датчик, деактивируется. Например, при отказе датчика поворота автомобиля вокруг вертикальной оси отключается измерение угла поворота автомобиля вокруг вертикальной оси системы рулевого управления с наложением угла поворота. Переменное передаточное отношение остается активным.
Если безопасная активация электродвигателя больше невозможна из-за сбоя, то система полностью выключается, и обеспечивается непосредственный сквозной привод рулевого механизма от рулевого колеса путем самоторможения шестеренчатой ступени и электромеханической блокировки. Этот переход на аварийный режим также активируется при остановке ДВС или отключении электропитания, что позволяет, к примеру, отбуксировать автомобиль.
Рулевое управление с усилителем для грузовых автомобилей
Рулевое управление полностью гидравлического типа
Гидростатические системы рулевого управления представляют собой системы рулевого управления с гидроусилителем. Рулящее усилие водителя гидравлически усиливается и исключительно гидравлически передается на управляемые колеса. Поскольку механическая связь отсутствует, то максимально допустимая скорость ограничивается региональным законодательством. В Германии она составляет 25 км/ч. В зависимости от конфигурации системы и свойств аварийного рулевого управления возможно увеличение скорости до 62 км/ч. Поэтому использование этих систем ограничивается спецтехникой.
Рулевое управление с одноконтурным гидроусилителем для грузовых автомобилей
Грузовые автомобили обычно оснащаются рулевым управлением с шариковой гайкой (рис. «Рулевой механизм с шариковой гайкой с усилителем» ). Управляющий клапан встроен в рулевой механизм и вместе с червячной передачей образует единый блок. Вращающее движение рулевого колеса передается по бесконечной цепи рециркулирующих шариков на шариковую гайку. Короткие зубья на шариковой гайке входят в зацепление с зубьями сектора. Создаваемое вращательное движение сектора через рулевой рычаг передается на рулевой привод управляемых колес.
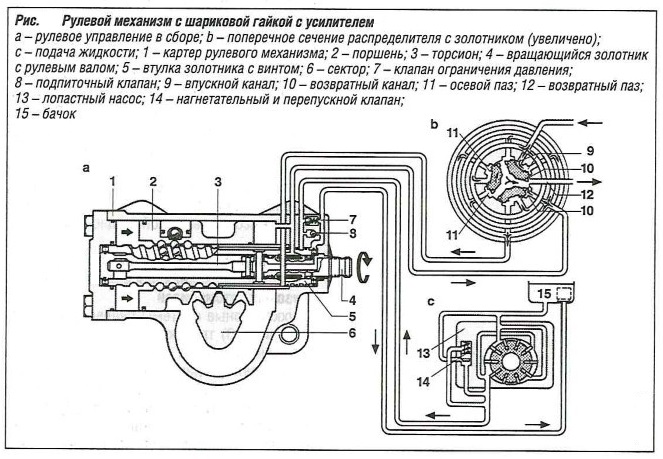
Сервоусилие прилагается так же, как и в реечном рулевом механизме с усилителем — поворотным золотниковым клапаном. Рабочий цилиндр образуется уплотняющей поверхностью между корпусом шариковой гайки и рулевым блоком. Поскольку снаружи корпуса не требуется дополнительных трубопроводов, создается прочный и компактный рулевой блок с высокой выходной мощностью.
Двухконтурная система рулевого управления, предназначенная для большегрузных грузовых автомобилей
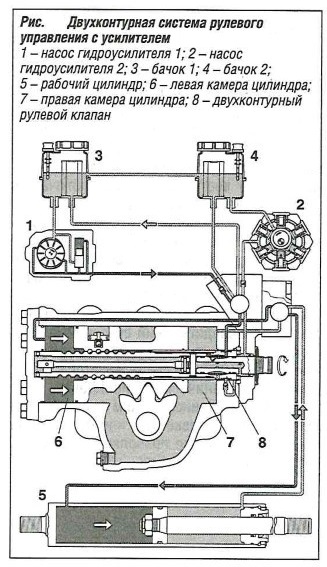 Двухконтурные системы рулевого управления (рис. «Двухконтурная система рулевого управления с усилителем» ) требуются тогда, когда необходимые движущие силы на рулевом колесе превышают регламентируемые Правилами ECE-R79 при отказе усилителя рулевого управления. Эти системы рулевого управления отличаются гидравлической избыточностью. Оба контура рулевого управления в этих системах функционально испытываются с помощью индикаторов расхода, и водителю сигнализируется состояние сбоя. Насосы для запитывания независимых контуров рулевого управления должны иметь разные приводы (например, от двигателя, от устройства, работа которого зависит от скорости движения автомобиля или электропривода). При отказе одного контура, к примеру, из-за сбоя в системе рулевого управления или остановки ДВС, автомобилем можно управлять с помощью рабочего резервного контура в соответствии с требованиями законодательства.
Двухконтурные системы рулевого управления (рис. «Двухконтурная система рулевого управления с усилителем» ) требуются тогда, когда необходимые движущие силы на рулевом колесе превышают регламентируемые Правилами ECE-R79 при отказе усилителя рулевого управления. Эти системы рулевого управления отличаются гидравлической избыточностью. Оба контура рулевого управления в этих системах функционально испытываются с помощью индикаторов расхода, и водителю сигнализируется состояние сбоя. Насосы для запитывания независимых контуров рулевого управления должны иметь разные приводы (например, от двигателя, от устройства, работа которого зависит от скорости движения автомобиля или электропривода). При отказе одного контура, к примеру, из-за сбоя в системе рулевого управления или остановки ДВС, автомобилем можно управлять с помощью рабочего резервного контура в соответствии с требованиями законодательства.
Двухконтурные системы обычно принимают форму рулевого управления с шариковой гайкой с усилителем со встроенным вторым клапаном рулевого управления. Этот второй клапан управляет дополнительно установленным рабочим цилиндром и обеспечивает дублирование существующей сервосистемы в рулевом управлении с шариковой гайкой.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: