
Видеодатчики играют важную роль в системах повышения безопасности, поскольку с их помощью интерпретируется визуальная информация (классификация объектов). В качестве простейшего примера, видеодатчики, установленные в задней части автомобиля, могут использоваться как дополнительная система в помощь ультразвуковой системе помощи при парковке. В системах ночного видения зона перед автомобилем освещается инфракрасным прожектором и снимается на переднюю камеру, откуда изображение передается в салон автомобиля. Другие системы повышения безопасности обрабатывают видео сигналы и извлекают из них информацию, используемую в тех или иных независимых функциях (например, предупреждение о сходе с полосы движения), или в качестве дополнительной информации для других функций (сочетание данных от разных датчиков).
Предупреждение о сходе с полосы движения и помощь в удержании на полосе движения
Непреднамеренный уход с полосы движения — это одна из наиболее распространенных причин аварий. Чаще всего это бывает вызвано усталостью водителя («микросон») или тем, что его внимание отвлекли. Предупреждение о сходе с полосы движения призвано бороться с такими ситуациями путем идентификации разметки впереди и подачи предупреждения водителю, если есть вероятность того, что автомобиль пересечет разметку полосы движения, а сигнал поворота не был включен.
 Системы предупреждения о сходе с полосы движения (LDW) используют видеокамеры и могут быть как моно-, так и стереосистемами. В хороших погодных условиях и при качественной разметке полос движения дальность действия моносистемы — порядка 40 м или немного больше; для стереосистемы дальность больше на 10-20 %. До настоящего времени только моносистемы нашли себе нишу на рынке, из соображений цены.
Системы предупреждения о сходе с полосы движения (LDW) используют видеокамеры и могут быть как моно-, так и стереосистемами. В хороших погодных условиях и при качественной разметке полос движения дальность действия моносистемы — порядка 40 м или немного больше; для стереосистемы дальность больше на 10-20 %. До настоящего времени только моносистемы нашли себе нишу на рынке, из соображений цены.
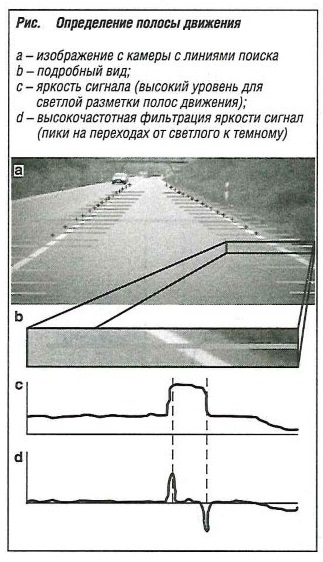
На рисунке «Определение полосы движения» показан принцип определения полос движения. Система обработки изображения ищет разметку полос движения, анализируя различия в контрасте между разметкой полос движения и поверхностью дороги. На рисунке а показано изображение с камеры с линиями поиска; на рисунке b показан подробный вид. На рисунке а, «Определение полосы движения« крестиками отмечено направление полосы движения, рассчитанное компьютером для обработки изображений. Для выявления линии анализируется яркость сигнала внутри линии поиска (рис. с, «Определение полосы движения» ). Границы маркировки полос движения определяются при помощи высокочастотной фильтрации (рис. d, «Определение полосы движения» ).
Предупреждение для водителя можно сгенерировать на основании этих сигналов, если автомобиль уходит с полосы движения. Здесь рассматриваются различные формы подачи предупреждения. Звуковое предупреждение через динамики автомобиля в виде предупредительного сигнала (при помощи стереосигнала можно также указать направление) или «звук от профилированной обочины» можно считать эффективными формами предупреждения. Недавно разработаны тактильные датчики для таких предупреждений. В конце 2004 года поступила в серийное производство система с вибрацией кресла (с информацией о направлении). В 2009 году начался серийный выпуск системы с вибрацией рулевого колеса или легкого сопротивления руля в требуемую сторону.
Преимущество подачи предупреждения непосредственно на рулевое колесо в том, что водитель напрямую ассоциирует опасность с движением руля.
Следующая ступень на пути к автоматическому поддержанию направления (помощь в удержании полосы движения с активным вмешательством в рулевое управление) больше не выглядит слишком фантастичной в свете сказанного. Однако, в соответствии с действующими нормативными актами, допускается, чтобы такая система была активна только в том случае, если водитель держит обе руки на руле. Кроме того, у водителя всегда должен быть приоритет перед системой.
Опознавание дорожных знаков
 Видеокамера регистрирует окружающую обстановку и передает видеосигнал компьютеру для обработки изображений. Вовремя движения автомобиля система постоянно ищет объекты, которые, судя по их форме, могут быть дорожными знаками. Когда такой объект найден, он отслеживается до тех пор, пока не окажется достаточно близко, чтобы снять его на видеокамеру. Опознавание дорожных знаков предполагает, что компьютер для обработки изображений «обучили» этим знакам.
Видеокамера регистрирует окружающую обстановку и передает видеосигнал компьютеру для обработки изображений. Вовремя движения автомобиля система постоянно ищет объекты, которые, судя по их форме, могут быть дорожными знаками. Когда такой объект найден, он отслеживается до тех пор, пока не окажется достаточно близко, чтобы снять его на видеокамеру. Опознавание дорожных знаков предполагает, что компьютер для обработки изображений «обучили» этим знакам.
Ограничение скорости, опознанное и обработанное компьютером для обработки изображений (рис. «Опознание дорожных знаков» ), подается на приборную панель и показывается в виде символа на графическом дисплее. Если водитель не соблюдает это ограничение скорости, система может подать дополнительное звуковое или тактильное предупреждение.
Надежное опознавание дорожных знаков сейчас возможно на скоростях до 160 км/ч, а также в условиях дождя и умеренной дымки над дорожным покрытием.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: