
Автомобили оснащаются постоянно возрастающим числом электронных систем, которые нуждаются в интенсивном обмене данными и информацией, причем требования к количеству данных и скорости обмена все увеличиваются.
Например, электронная программа курсовой устойчивости обменивается данными с системами управления работой дизеля и коробки передач, чтобы эффективно гарантировать поддержание курсовой устойчивости автомобиля. Например, на обычном автомобиле среднего класса кабельная разводка имеет протяженность почти 1,6 км и включает в себя около 300 разъемов с общим числом контактов порядка 2000. Это количество весьма осложняло эксплуатацию бортовой сети управления. Выход был найден в использовании более специфичной, пригодной для автомобиля системы так называемых шин с последовательной передачей данных, из множества которых за стандарт была взята шина CAN.
Электронные системы автомобиля
На современном автомобиле используется большое количество электронных систем, например,:
- Система управления работой дизеля (EDC, Мотроник);
- Система управления работой коробки передач (EGS);
- Антиблокировочная система (ABS);
- Противобуксовочная система (ASR);
- Система курсовой устойчивости (ESP);
- Адаптивное регулирование скорости автомобиля (АСС);
- Мобильные мультимедийные системы и их панели, отображающие информацию.
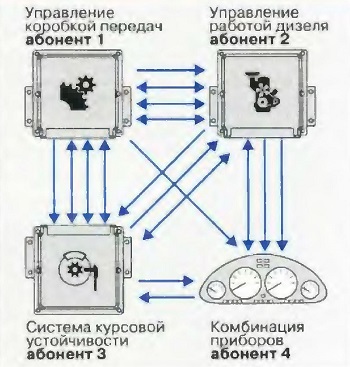
Рис. Обмен данными через отдельно проложенные проводники
Возрастающий объем использования на автомобиле электронных систем управления, регулирования и коммуникации, а также связанный с этим интенсивный обмен данными между системами требуют объединения отдельных блоков управления в единую сеть.
Обычный метод обмена данными через отдельно проложенные от узла к узлу проводники часто наталкивается на ограничения технологических возможностей изготовителя автомобиля (рис. «Обмен данными через отдельно проложенные проводники»), так что сложность кабельной разводки препятствует ее использованию. Кроме того, ограничение числа контактов в штекерных разъемах затрудняет разработку блоков управления.
Последовательная передача данных

Рис. Линейная структура шины CAN
CAN (Controller Area Network, т.е. бортовой контроллер связи) является линейной системной шиной, специально разработанной для применения на автомобиле (рис. «Линейная структура шины CAN»). Ее применяют также в других областях (например, в бытовой технике).
Данные последовательно передаются по общей шине CAN, к которой имеют доступ все системы автомобиля. Через интерфейсы CAN блоки управления могут обмениваться информацией. Благодаря объединению в сеть требуется малое количество проводов, так как по одному проводнику шины можно обмениваться большим числом данных и сами данные могут неоднократно считываться.
Области применения шины CAN на автомобилях
На автомобиле шины CAN в основном используются в перечисленных ниже четырех областях применения с различными требованиями в каждой из них.
Мультиплексная система автомобиля
Мультиплексная система предназначена для управления и регулирования работы систем обеспечения комфорт, а салона (кабины). Сюда относятся, например, регулирование климата в салоне, центральное управление замками дверей и индивидуальная регулировка сидений. Скорость передачи данных находится в пределах между 10 кбод (1 кбод = 1 килобитов/с) и 125 кбод (низкоскоростные CAN).
Применение мобильной связи в автомобиле
Применение системы CAN в области мобильной связи объединяет на автомобиле мультимедийные устройства такие, как система навигации, мобильный телефон, аудиоаппаратура, телевидение и т.д. Все они зачастую оснащены объединенным пультом управления и единой панелью отображения информации. Соединение в сеть служит в первую очередь для того, чтобы унифицировать процесс управления, собирать сведения о состоянии устройств, снизить до минимума отвлекающий фактор для водителя. В подобных случаях обмен информацией ведется со скоростью до 125 кбод. При этом непосредственная передача аудио- или видеосигналов невозможна.
Системы диагностики с шиной CAN
Система диагностики при применении шин CAN использует имеющиеся программы диагностики подключенных блоков управления. Сегодня обычная диагностика по специальному руководству К (ISO 9141) уже представляется недостаточной. При использовании программ диагностики также ведется интенсивный обмен данными, скорость передачи которых составляет 250 или 500 кбод.
Работа в условиях реального времени
При работе в условиях реального времени различные системы объединяются друг с другом через шину CAN, например, системы управления работой дизеля и коробки передач объединены с системой курсовой устойчивости для управления движением автомобиля.
Чтобы гарантировать необходимую скорость реакции систем используются характерные скорости передачи данных —125 кбод и 1 Мбод (высокоскоростные CAN).
Конфигурация шины CAN
Под конфигурацией понимают размещение и взаимодействие системы. Шина CAN имеет линейную структуру (рис. «Линейная структура шины CAN»). По сравнению с другими логическими структурами (кольцевая или звездообразная шины) такая совокупная система имеет незначительную вероятность сбоя в работе. В том случае, если одна из систем по какой-то причине отключается, шина CAN полностью находится в распоряжении других абонентов, которыми могут быть как блоки управления, так и индикаторы, датчики или исполнительные механизмы, работающие по принципу мультимастера. При этом контроль доступа к шине CAN вменяется в обязанность всем равноправно подключенным абонентам. Вышестоящее управление не является необходимым.
Адресация в шине CAN по содержанию
Система шины CAN адресует сведения не по меткам абонентов, а по их содержанию. К каждому сообщению присоединяется жесткий идентификатор (имя сообщения), который характеризует содержание этого сообщения (например, частота вращения коленчатого вала). Этот идентификатор содержит 11 битов (стандартный формат) или 29 битов (расширенный формат).
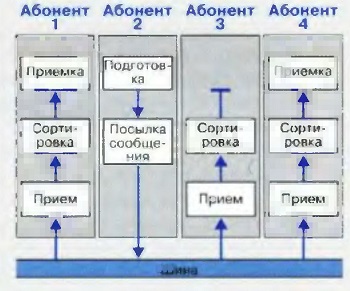
Рис. Адресация и проверка приемлемости Абонент 2 передает, абоненты 1 и 4 принимают информацию.
С адресацией по содержанию каждый участник должен решать сам, нуждается ли он в посланном по шине сообщении («проверка приемлемости», рис. «Адресация и проверка приемлемости»). Эта функция может выполняться специальным модулем CAN (Full-CAN), благодаря чему разгружается центральный микропроцессор блока управления. Модули Basic-CAN «видят» все сообщения. Отказ от адресации абонентов и избранная поэтому адресация по содержанию способствует более высокой гибкости совокупной системы управления автомобилем, которая позволяет проще переходить на различные варианты комплектации оборудования. Если блоку управления нужны новые сведения, которые уже отправлены на шину, их можно просто востребовать. Поскольку речь идет о приемниках, новые абоненты также могут быть добавлены в систему без необходимости модификации существующих блоков.
Предоставление шины
Идентификатор, наряду с содержанием информации, определяет приоритет, который сообщение имеет при посылке. Идентификатор в виде короткого двоичного кода имеет высокий приоритет.
Приоритеты для сообщений выводятся, например, по скорости изменения содержимого или уровня его безопасности. Разным сообщениям никогда не присваиваются равные приоритеты.
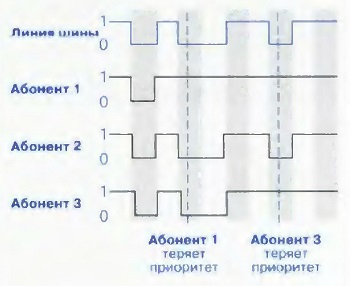
Рис. Побитовый арбитраж (распределение доступа к общей шине при нескольких сообщениях). Абонент 2 передает информацию (сигнал на шине идентичен сигналу абонента 2). 0 — преобладающий уровень 1 — не преобладающий уровень
Если шина свободна и сообщения готовы для передачи, каждый абонент может приступать к передаче своего сообщения. Конфликты, возникающие между различными устройствами при поиске доступа к шине CAN, избегаются побитовым «арбитражем» соответствующего идентификатора (рис. «Побитовый арбитраж (распределение доступа к общей шине при нескольких сообщениях)»). При этом в первую очередь, без потери времени и информации, пропускаются сообщения с высшим приоритетом (неразрушающий протокол). Протокол CAN основывается на двух логичных состояниях: «преобладающее» или доминантное (логический ноль (0)) и «не преобладающее» или рецессивное (логическая единица (1)). «Монтажное И» (Wired-End) схемы арбитража означает, что посланный абонентом доминантный бит перезаписывает не преобладающий опт других абонентов. Абонент с самым коротким идентификатором (как говорят, с высшим приоритетом) первым подключается к шине.
Устройства с более низким приоритетом будут автоматически повторять попытки передачи сообщений до тех пор, пока доступ к шине вновь не освободится.
Чтобы все сообщения доходили до цели, скорость передачи информации по шипе должна соответствовать числу участников. Для постоянно изменяющихся сигналов (например, частота вращения коленчатого вала) устанавливается время цикла.
Формат сообщения по шине CAN
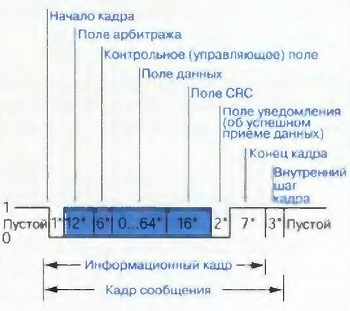
Рис. Формат сообщений CAN. 0 — преобладающий уровень; 1 — не преобладающий уровень. * Число битов
Система CAN поддерживает два различных формата, которые отличаются исключительно величиной идентификатора. В стандартном формате идентификатор содержит 11 битов, в расширенном формате — 29 битов. Оба формата взаимно совместимы и могут использоваться в общей сети. Информационный кадр состоит из семи полей, следующих одно за другим (рис. «Формат сообщений CAN»), и содержит 130 битов (стандартный формат) или 150 битов (расширенный формат).
В состоянии покоя шина неактивна. «Начало кадра» с помощью преобладающего бита показывает начало передачи и синхронизирует всех абонентов. «Поле арбитража» состоит из уже описанного идентификатора и контрольного бита. При передаче этого поля передатчик проверяет каждый бит, имеет ли он еще право на передачу или же доступ к шине получает абонент с более высоким приоритетом. Следующий за идентификатором контрольный бит обозначается, как бит RTR (Remote Transmission Request), идет ли речь при передаче о посылке данных (кадр данных) получателю или требовании данных от передатчика.
«Поле управления» охватывает бит IDE (Identifier Extension Bit), которым стандартный формат (IDE = 0) отличается от расширенного (IDE = 1) и сопровождается зарезервированным битом для будущих расширений. Оставшиеся 4 бита этого поля описывают количество байт в следующем поле данных, позволяя пользователю уточнить, получил ли он всю информацию.
«Поле данных» содержит от 0 до 8 битов информации. Поле данных, содержащее 0 битов, используется для синхронизации распределенных процессов. Можно посылать также несколько сигналов в одном сообщении (например, температура охлаждающей жидкости и частота вращения коленчатого вала).
«Поле CRC» (Cyclic Redundancy Check, т.е. циклическая проверка избыточности) содержит слово безопасности кадра для распознавания появившихся нарушений передачи.
«Поле подтверждения» служит получателям для подтверждения правильно принятых сообщений. Поле охватывает область памяти и не преобладающий ограничитель. Запрос (ACK-Slot) также посылается как не преобладающий и при правильном приеме сообщения записывается получателями как преобладающий. При этом не играет никакой роли, имеет ли значение для получателя — это сообщение или нет. Правильный прием подтверждается.
«Конец кадра» состоит из 7 не преобладающих битов и обозначает конец сообщения.
«Зазор между кадрами» состоит из 3 битов, которые разделяют сообщения, следующие одно за другим. Затем шина остается в свободном не преобладающем состоянии до тех пор, пока какой-нибудь любой следующий абонент не запросит доступ к ней.
Как правило, передатчик инициирует передачу данных во время отправления «Кадра данных». В то же время получатель может затребовать данные у передатчика, когда посылает «Дистанционный кадр».
Распознавание сбоев в системе CAN
В протокол системы CAN интегрирован ряд контрольных механизмов для распознавания сбоев. В «поле CRC» получатель сравнивает принятую последовательность CRC с рассчитанной из сообщения.
При «проверке кадра» распознаются ошибки кадра, в котором проверяется структура («защита кадра»). Протокол CAN содержит несколько полей битов с жестким форматом, который проверяется всеми абонентами.
«Проверка подтверждения» — это подтверждение получателями принятия кадра сообщения. Отсутствие указывает, например, на выявленные ошибки при передаче.
«Мониторинг» означает, что передатчик оценивает уровень шины и выявляет различия между посланным и считанным битами.
Соблюдение «заполнения разрядов» проверяется системой Code Check. Правило заполнения говорит, что в каждом «кадре данных» или «внешнем кадре» между «началом кадра» и концом «поля CRC» могут посылаться максимум 5 следующих один за другим битов с одним и тем же приоритетом.
После этих 5 битов передатчик вводит за ними бит с противоположным приоритетом. Получатели удаляют все эти введенные биты после приема сообщения. Через «заполнение разрядов» можно выявить нарушение связи.
Если абонент устанавливает нарушение, то он прерывает текущую передачу посылкой «ошибки кадра», которая состоит из шести следующих один за другим преобладающих битов. Действие абонента основывается на целенаправленном нарушении правила заполнения. Вследствие этого предотвращается передача ошибочного сообщения другим получателям.
Неисправные абоненты могли бы значительно загрузить шину тем, что постоянно прерывали бы обмен сообщениями посылкой «ошибки кадра». Чтобы это предотвратить, шина CAN оснащена механизмом, который может при необходимости отличать мгновенно возникающие нарушения от длительных нарушений и локализовать неисправные приемопередающие устройства. Это происходит с помощью статистической оценки ошибочных ситуаций.
Стандартизация системы CAN
Система CAN стандартизована для обмена данных на автомобиле как в системе ISO (International Organization for Standardization), так и в системе SAE (Society of Automotive Engineers). Приняты следующие стандарты:
- для низкоскоростного обмена данными — не более 125 килобитов/с (ISO 11 519-2);
- для высокоскоростного обмена данными — не менее 125 килобитов/с (ISO 11 898), SAE J 22 584 (легковые автомобили) или SAE J 1939 (грузовые автомобили и автобусы).
- Нормы ISO на диагностику через шину CAN находятся в процессе разработки (проект ISO 15 765).
Развитие систем коммуникаций
Параллельно с растущей производительностью системных компонентов и возрастающей интеграцией функций растут также и требования к системе коммуникаций. К тому же появляются новые системы, например, из области электроники развлечений. В целом некоторые системы, с учетом современных требований, будут действовать на базе определенной системной шины автомобиля.
Наряду с электронным обменом данных существуют также оптические системы, которые в основном применяются в мультимедийной области. Эти шины позволяют осуществлять весьма быстрый обмен данными и могут передавать большие массивы информации, что необходимо для работы аудио- и видеосистем.
Совмещением отдельных функций можно создать в масштабах автомобиля системное соединение, где обмен информацией будет обеспечиваться через шину данных. Реализация таких намерений требует обязательных соглашений о единых интерфейсах и содержании функций. По этим соглашениям был разработан пакет программ CARTRONIC® как единая концепция для всех систем управления и регулирования работы агрегатов автомобиля. На рис. «Монтажная схема CARTRONIC» показано возможное разделение функций, которыми управляет, соответственно, центральный координатор. Отдельные функции могут выполняться различными блоками управления.
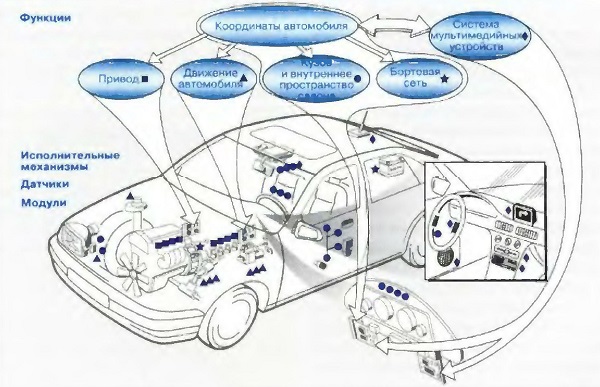
Рис. Монтажная схема CARTRONIC
Благодаря взаимодействию независимых прежде систем могут решаться совершенно новые задачи. Например, после обмена данными между системой спутниковой навигации и блоком управления работой автоматической коробки передач последняя перед подъемом автомобиля по трассе может своевременно переключиться на низшую передачу. Фары в различных ситуациях могут изменять интенсивность светового конуса в зависимости от данных системы навигации (например, на перекрестках). К мультимедийной сети могут подсоединяться также радиоприемник, проигрыватель компакт-дисков, телевизор, мобильный телефон, выход в сеть «Интернет», а также навигационное и терминальное оборудование.