
Колебания, это многократное повторение одинаковых или почти одинаковых процессов. Сопутствуют многим природным процессам и явлениям, вызванным человеческой деятельностью — от простейших колебаний маятника до электромагнитных колебаний распространяющейся световой волны. Механические колебания — это периодически повторяющиеся движения, вращательные или возвратно поступательные. Это тепловые колебания атомов, биение сердца, колебания земли (моста) под ногами. В этой статье мы рассмотрим механические колебания и вибрации.

Определения
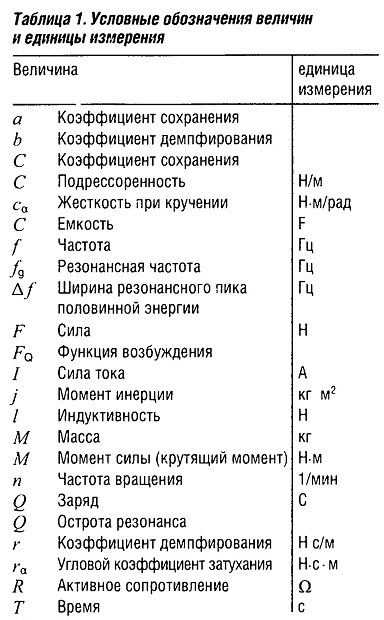
(Обозначения и единицы измерения в Табл. «Условные обозначения величин и единицы измерения», см. также DIN 1311).
 |
 |
Колебания или вибрации
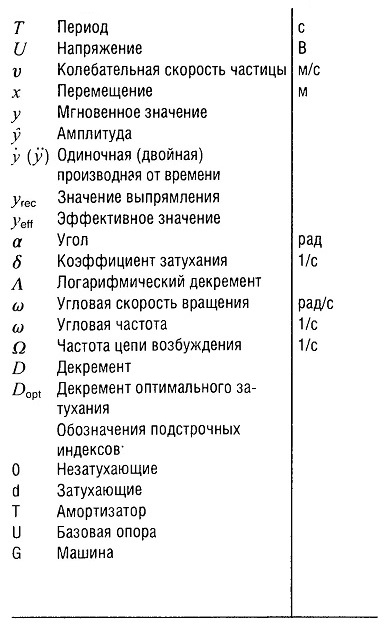
 Термины, применяемые для обозначения изменений какой-либо физической величины, более или менее регулярно повторяющихся во времени и меняющихся по направлению (рис. «Синусоидальные колебания» ).
Термины, применяемые для обозначения изменений какой-либо физической величины, более или менее регулярно повторяющихся во времени и меняющихся по направлению (рис. «Синусоидальные колебания» ).
Период
Время Т, за которое совершается одно полное колебание.
Амплитуда
Максимальное мгновенное (пиковое) значение у, которого достигает какая-то физическая величина, совершающая синусоидальное колебание.
Частота
Число f колебаний, совершаемых в секунду. Это величина, обратная периоду колебаний Т.
Угловая частота
Угловая частота ω — это частота f умноженная на 2π.
Колебательная скорость частицы
Мгновенное значение переменной скорости частицы v, движущейся в направлении колебания. Не следует путать со скоростью распространения бегущей волны (например, скоростью звука).
Ряды Фурье
Любую периодическую функцию, являющуюся гладкой и кусочно-непрерывной, можно представить как совокупность синусоидальных гармонических компонентов.
Биения
Биения происходят при наложении двух синусоидальных колебаний со схожей частотой (f1≈f2). Они являются периодическими. Основная частота в этом случае равна разнице между частотами наложенных синусоидальных колебаний.
Собственная частота
Собственная частота — это такая частота f при которой колебательная система колеблется свободно после однократного возбуждения (собственные колебания). Она зависит только от характеристик самой колебательной системы.
Демпфирование
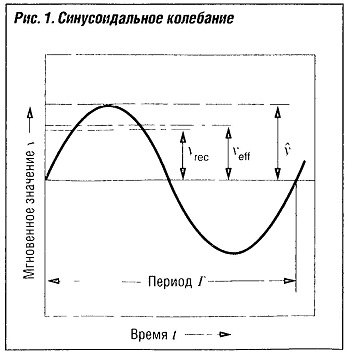
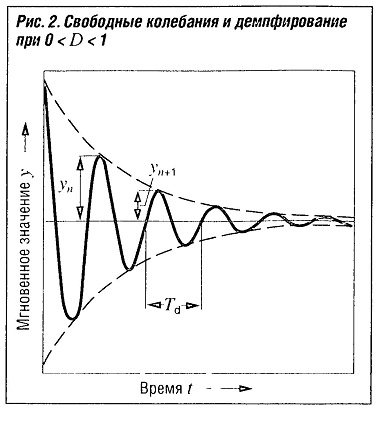
Мера потерь энергии в колебательной системе при превращении одной формы энергии в другую. Следствием является затухание колебаний (рис. «Свободные колебания и демпфирование» ).
 |
 |
Декремент
Декремент D — это мера измерения степени демпфирования.
Логарифмический декремент
Логарифмический декремент Λ — это натуральный логарифм отношения двух экстремальных значений собственных затухающих колебаний, различающихся на один период.
Вынужденные колебания
Возникают под влиянием внешней физической силы (возбуждения). Частота вынужденных колебаний определяется частотой возбуждения.
Передаточная функция
Передаточная функция — это частное амплитуды наблюдаемого состояния или выходной переменной и амплитуды возбуждения, находящееся в зависимости от частоты возбуждения f или частоты цепи возбуждения ω.
Резонанс
Возникает, когда передаточная функция принимает очень большие значения, при этом частота возбудителя приближается к собственной частоте.
Резонансная частота
Частота резонатора, при которой колеблющаяся величина достигает своего максимального значения. Если пренебречь демпфированием, резонансная частота равна собственной частоте.
Ширина резонансного пика половинной энергии
Разница между частотами, при которой уровень переменной величины падает до 1/ √ 2 ≈ 0,707 максимального значения.
Острота резонанса
Острота резонанса Q (или добротность) — это максимальное значение передаточной функции.
Соединение колебательных систем
Если две колебательные системы соединяются механически, посредством массы или упругости, либо электрически, посредством индуктивности или емкости, между ними происходит периодический обмен энергией.
Волна
Волна-это пространственное и временное изменение состояния среды, которое можно представить как однонаправленное ее перемещение. Если материя может существовать в пространстве, не обязательно, что она может быть перемещена.
Существуют поперечные и продольные волны.
Интерференция
Принцип независимого наложения волн. В любой точке пространства мгновенное значение результирующей волны равно сумме мгновенных значений каждой из волн.
Плоская волна
Плоская волна — это волна, у которой поверхности одинаковой фазы (например, максимумы или фронты волны) формируют плоскость, т.е. которая распространяется по линейному закону. Фронты волны расположены вертикально по отношению к направлению распространения.
Стоячие волны
Стоячие волны возникают в результате интерференции между двумя волнами, движущимися в противоположных направлениях, с равными длиной, частотой и амплитудой. Амплитуда стоячей волны постоянна в любой точке; узлы колебаний (нулевая амплитуда) и пучности (максимальная амплитуда) совпадают. Стоячие волны наблюдаются, например, когда плоская волна отражается от плоской поверхности, расположенной вертикально по отношению к направлению распространения волны.
Значение выпрямления
Значение выпрямления уrес — это среднее арифметическое значение, линейное во времени, параметров периодического сигнала:
уrес = 1/T ∫|у| dt
Для синусоидальной кривой:
уrес = 2 у/π ≈ 0,637 у
Эффективное значение
Эффективное значение уeff это временное виртуальное значение периодического сигнала. Оно также известно как среднеквадратическое значение:
уeff = √ (1/T ∫ у2 dt)
Для синусоидальной кривой:
уeff = у/√ 2 ≈ 0,707
Коэффициент гармоник
Коэффициент гармоник — это соотношение уrес и уeff. Для синусоидальной кривой коэффициент гармоник равен уrес / уeff ≈ 1,111
Амплитудный фактор
Для синусоидальной кривой амплитудный фактор равен: y/yeff = √ 2 ≈ 1,414.
Уравнения
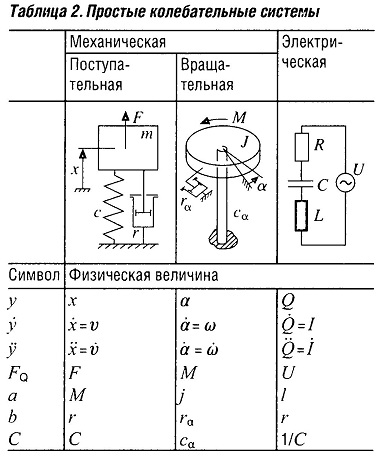
Данные уравнения применимы к следующим простым колебаниям (таблица «Простые колебательные системы» ), если общие обозначения в формулах заменить соответствующими обозначениями физических величин.
Дифференциальное уравнение
ay + by +су = FQ(t) = FQ sin Ω t
Период T=1/f
Угловая частота ω = 2 πf.
Синусоидальное колебание y = y sin ωt
Собственные колебания (FQ = 0)
Логарифмический декремент (рис. «Свободные колебания и демпфирование» ):
Λ = ln(yn/yn+1) = πb / √ (ca — b2/4)
Коэффициент затухания δ = b/2a
Декремент D = δ / ω0 = b/2 √ca ,
D = Λ/ √(Λ2+4π2)≈ Λ/2π (низкая степень демпфирования).
Угловая частота незатухающих колебаний (D = 0): ω0 = √c/a .
Угловая частота затухающих колебаний (0<D<1): ωd = ω0 √ (1-D2) .
При D⩾ 1 колебания отсутствуют, только медленное перемещение.
Вынужденные колебания
Величина функции передачи:
y/fQ = 1/√(c-aΩ2)2 + (bΩ)2 = 1/c√(1-(Ω/ω0)2)2 + (2DΩ/ω0)2
Резонансная частота fg = f0√1-2D2 <f0,
Острота резонанса Q= 1/(2D√1-D2),
Резонансная частота fg ≈ f0 (при D ⩽ 0,1),
Острота резонанса Q≈ 1/2D, (при D ⩽ 0,1)
Ширина резонансного пика половинной энергии Δf =2Df0 = f0/Q .
Ослабление вибрации
Гашение вибраций
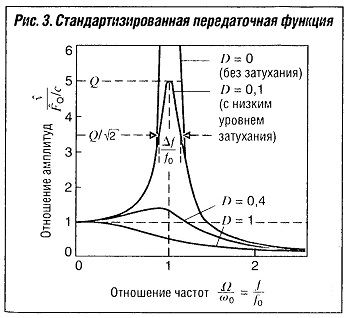 Если демпфирование вибраций может быть выполнено между машиной и местом, в наименьшей степени подверженным их воздействию, то это обеспечит наибольший уровень затухания (при наибольшем декременте, см.рис. «Стандартизованная передаточная функция».
Если демпфирование вибраций может быть выполнено между машиной и местом, в наименьшей степени подверженным их воздействию, то это обеспечит наибольший уровень затухания (при наибольшем декременте, см.рис. «Стандартизованная передаточная функция».
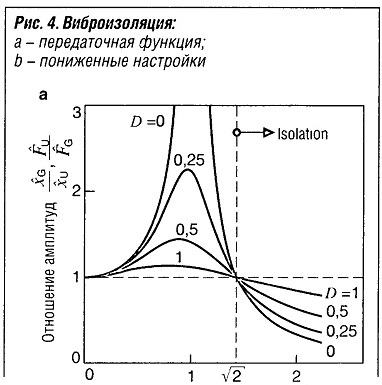
Виброизоляция
Активная виброизоляция
Машина должна устанавливаться на опору таким образом, чтобы силы, передающиеся на нее, были незначительными.
Необходимо выбирать опору так, чтобы конструкция находилась вне резонанса, и ее собственная частота была бы ниже самой низкой возмущающей частоты. Затухание ухудшает виброизоляцию. Слишком низкие значения затухания могут привести к трудностям, вызванным резонансом во время разгона машины (рис. «Виброизоляция» ).
 |
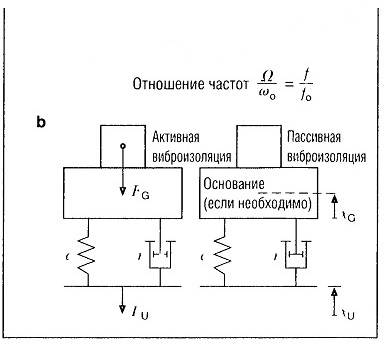 |
Пассивная виброизоляция
Машина должна монтироваться таким образом, чтобы вибрация и тряска на опорах передавались механизмам в незначительной степени.
Принимаемые меры аналогичны случаю с активной изоляцией. Во многих случаях, гибкая подвеска или усиленное демпфирование неприменимы. Для предотвращения возникновения резонанса, крепление машины должно быть таким жестким, чтобы собственная частота была намного больше самой высокой частоты возбуждения, которая может возникнуть (рис. «Виброизоляция» ).
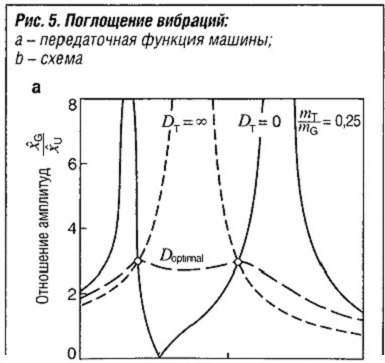
Поглощение вибраций
Гаситель колебаний с фиксированной собственной частотой
При настройке собственной частоты fT поглощающей массы с гибким соединением без потерь на частоту возбуждения, вибрация основной массы полностью поглощается (рис. «Поглощение вибраций» ) и продолжает вибрировать только поглощающая масса. Эффективность поглощения снижается по мере того, как изменяется частота возбудителя. Затухание препятствует полному поглощению. Однако соответствующая настройка частоты гасителя колебаний и декремента оптимального затухания вызывает широкополосное ослабление вибрации, которое остается эффективным при изменении частоты возбудителя.
 |
 |
Гаситель колебаний с переменной собственной частотой
Вращательные колебания с частотами возбуждения, пропорциональными частоте вращения (например, порядок уравновешивания ДВС), могут поглощаться с помощью амортизаторов с собственными частотами, пропорциональными частоте вращения (маятник в поле центробежных сил). Поглощение вибраций эффективно при любых скоростях вращения. Поглощение вибраций возможно и для колебательных систем (осцилляторов) с несколькими степенями свободы, посредством использования нескольких гасителей колебаний.
Модальный анализ
Динамические характеристики (характеристики собственных колебаний) колебательных систем определяются с помощью модального анализа. Он используется в проектировании, помимо прочих способов, для оптимизации конструкций с точки зрения колебательных параметров и идентификации проблемных участков, а также в акустике для анализа шумов, порождаемых конструкцией изделия).
Колебательная конструкция, которая, представляя собой сплошную среду, имеет бесконечно много степеней свободы, заменяется в явном виде конечным числом одномассовых генераторов колебаний. Созданная таким образом модальная модель конструкции описывается модальными параметрами:
- Формы собственных колебаний (собственный вектор или мода);
- Собственные частоты (собственные значения);
- Соответствующие модальные параметры демпфирования.
Необходимым условием является не изменяющаяся во времени линейно-эластичная структура. Любое колебание структуры может быть искусственно воссоздано по известным характеристическим векторам и значениям. Тем не менее, колебания наблюдаются лишь в ограниченном числе точек из возможных направлений колебаний (степеней свободы) и в определенных частотных интервалах.
Еще более детальный процесс совмещения субструктур объединяет, например, модальные модели различных структур в одну общую модель.
Числовой модальный анализ
Для выполнения аналитического модального анализа необходимо знать геометрию модели, свойства материала и граничные условия. Основой числового модального анализа является многочастичная система или конечноэлементная модель конструкции. Из этого вычисляются собственные значения и собственные векторы решением задачи на собственные значения.
Числовой модальный анализ выполняется без прототипа конструкции и может использоваться уже на ранних стадиях разработки. Однако часто точных знаний о фундаментальных свойствах конструкции (демпфирование, граничные условия) не хватает, и это означает, что модальная модель иногда бывает ошибочной. Кроме того, ошибка является неидентифицируемой. Одним из решений данной проблемы служит корректировка модели с использованием результатов экспериментального модального анализа.
Экспериментальный модальный анализ
Для экспериментального модального анализа необходим прототип конструкции. Анализ основывается на измерениях передаточных функций. С этой целью конструкция либо возбуждается в одной точке в заданном диапазоне частот, и колебательные отклики измеряются в нескольких точках, либо она возбуждается последовательно в нескольких точках, и колебательные отклики всегда измеряются в одной точке. 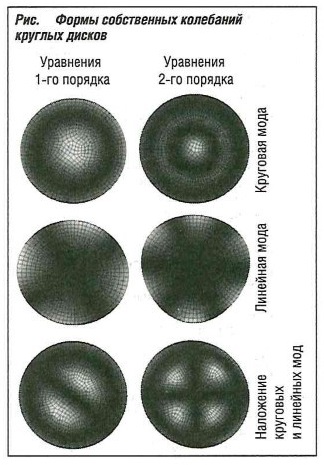 Модальная модель выводится из матрицы функций передачи, которые определяют данную модель. В качестве средства возбуждения используется импульсный молот или электродинамический «вибратор». Отклик измеряется с помощью датчиков ускорения или лазерного виброметра.
Модальная модель выводится из матрицы функций передачи, которые определяют данную модель. В качестве средства возбуждения используется импульсный молот или электродинамический «вибратор». Отклик измеряется с помощью датчиков ускорения или лазерного виброметра.
Экспериментальный модальный анализ также может применяться для подтверждения результатов числового анализа. Затем могут быть выполнены имитационные расчеты на достоверной числовой модели. В расчетах вычисляется ответная реакция структуры на определенное возбуждение, соответствующее, например, условиям лабораторного опыта.
Посредством структурных модификаций (изменения массы, затухания или жесткости) динамическое поведение может быть оптимизировано до уровня, соответствующего действующим условиям. При сравнении модальных моделей, полученных при помощи обоих способов, окажется, что аналитический модальный анализ более точен, чем экспериментальный, за счет большего числа степеней свободы. Это, в частности, позволяет проводить расчеты, основанные на модели.
Формы собственных колебаний по результатам модального анализа могут быть отражены в графическом или анимационном виде (примеры на рис. «Формы собственных колебаний округлых дисков» ). Различные уровни серого показывают перемещение вертикально по плоскости проекции. Частичное искривление дисков является результатом данных перемещений.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: