Развитие технологий производства датчиков, позволило их применять в интеллектуальных системах безопасности, к которым относятся системы помощи водителю. В стремлении обеспечить конкурентоспособность своих автомобилей, производители поддерживая передовые технологии, внедряют их на новые машины. Вот о том, какими бывают датчики для систем повышения безопасности при движении автомобиля, мы и поговорим в этой статье.

Ультразвуковая технология
В современных системах, помогающих при движении задним ходом и парковке (см. «Системы парковки автомобилей») используются ультразвуковые датчики малой дальности действия (порядка 2,5 м). Они встраиваются в бамперы автомобилей и служат для вычисления расстояний до препятствий с целью контроля пространства при парковке и маневрировании. При приближении к препятствию система выдает водителю звуковые и световые сигналы.
Более новые датчики с дальностью действия до 4,5 м позволяют использовать систему помощи при парковке, которая либо выдает водителю инструкции по оптимальной парковке, либо осуществляет руление при въезде на парковочное место, а водителю остается лишь следить за перемещением автомобиля в продольном направлении.
Конструкция ультразвукового датчика
 Ультразвуковой датчик (рис. «Вид ультрозвукового датчика в разрезе» ) состоит из пластмассового корпуса со встроенным штырьковым разъемом, ультразвукового преобразователя (алюминиевого блока с диафрагмой, на внутреннюю часть которой приклеен пьезокерамический элемент) и печатной платы с передающей и оценивающей электроникой. Они электрически соединены с ЭБУ с помощью трех выводов, два из которых — питающие. Третий, служащий в качестве двунаправленной сигнальной линии, используется для активизации функции передачи сигналов и принятия возвращенного сигнала.
Ультразвуковой датчик (рис. «Вид ультрозвукового датчика в разрезе» ) состоит из пластмассового корпуса со встроенным штырьковым разъемом, ультразвукового преобразователя (алюминиевого блока с диафрагмой, на внутреннюю часть которой приклеен пьезокерамический элемент) и печатной платы с передающей и оценивающей электроникой. Они электрически соединены с ЭБУ с помощью трех выводов, два из которых — питающие. Третий, служащий в качестве двунаправленной сигнальной линии, используется для активизации функции передачи сигналов и принятия возвращенного сигнала.
Принцип работы ультразвукового датчика
Ультразвуковой датчик принимает от ЭБУ цифровой импульс. Затем электроника заставляет колебаться алюминиевую диафрагму с прямоугольными импульсами на резонансной частоте (около 48 кГц) с типичным периодом порядка 300 мкс, в результате чего испускаются ультразвуковые импульсы. Отраженный от препятствия звук снова заставляет колебаться диафрагму, между тем уже успокоившуюся (прием невозможен в течении периода успокоения, порядка 900 мкс). Эти колебания выводятся пьезоэлектрическим элементом в виде аналогового электрического сигнала, который затем усиливается и преобразуется в цифровой.
Обычно ультразвуковые датчики для описанной области применения имеют селективную характеристику испускания с широким диапазоном чувствительности по горизонтали (для определения как можно большего количества объектов) и узким диапазоном чувствительности по вертикали (во избежание отражений от земли).
Радарная технология на автомобиле
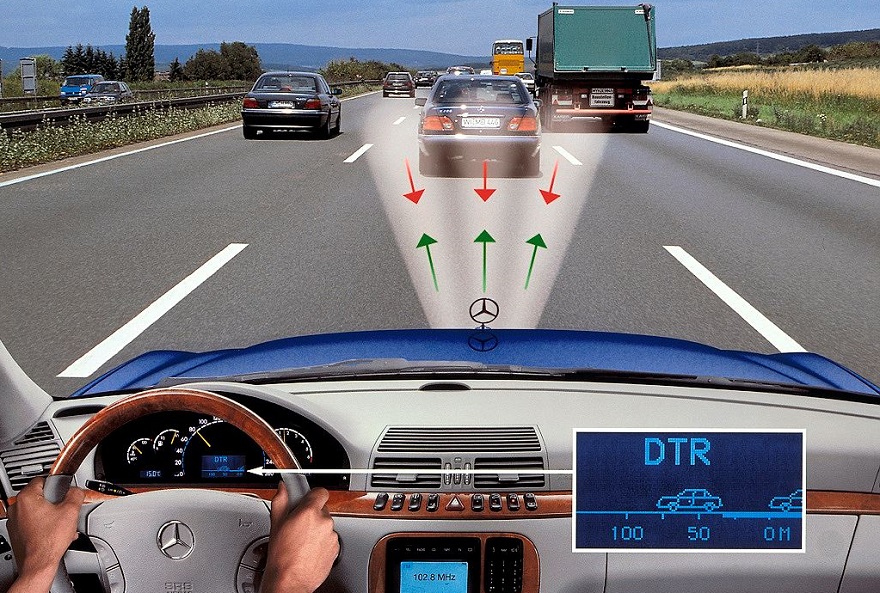
Радарная технология используется, помимо прочего, в адаптивном круиз-контроле (АСС) для определения движущихся впереди автомобилей и соответственной адаптации скорости движения. Излучаемые радаром электромагнитные волны отражаются от металлических поверхностей и других отражающих материалов и затем регистрируются приемной частью радара. Расстояние до объектов в диапазоне чувствительности можно измерить на основании времени распространения этих волн. Для измерения относительной скорости используется эффект Допплера.
Благодаря своим превосходным свойствам в плане быстрого и точного измерения расстояния и относительной скорости радар также очень хорошо подходит для использования в системах активной и пассивной безопасности. Примерами таких систем являются прогнозирующие системы аварийного торможения и раннего распознавания столкновений.
Методы испытаний
Принимаемые сигналы сравниваются с передаваемыми по времени распространения или частоте. Используемые методы значительно различаются по способу сравнения сигналов. Передаваемые волны модулируются, чтобы принимаемый сигнал можно было уникально сопоставить передаваемому. Самыми распространенными формами модуляции являются импульсная, где генерируются импульсы в 10-30 нс, что соответствует длине волны 3-10 м, и частотная, где вовремя передачи мгновенная частота волн изменяется в зависимости от времени.
У всех радарных датчиков измерение расстояния основано на прямом или косвенном измерении времени распространения сигнала с момента его передачи и до момента его приема в виде отраженного сигнала.
Импульсная модуляция
В случае импульсной модуляции измеряется время распространения τ сигнала от его передачи до его приема. Принятый волновой пакет нужно демодулировать, чтобы извлечь нужную информацию. Учитывая скорость света, можно вычислить расстояние до движущегося впереди автомобиля по разности времени. При прямом отражении оно определяется как двойное расстояние d до отражателя, поделенное на скорость света с:
τ = 2d/с
Для расстояния d = 150 м и с ≈ 300 000 км/с время распространения τ≈1,0 мкс.
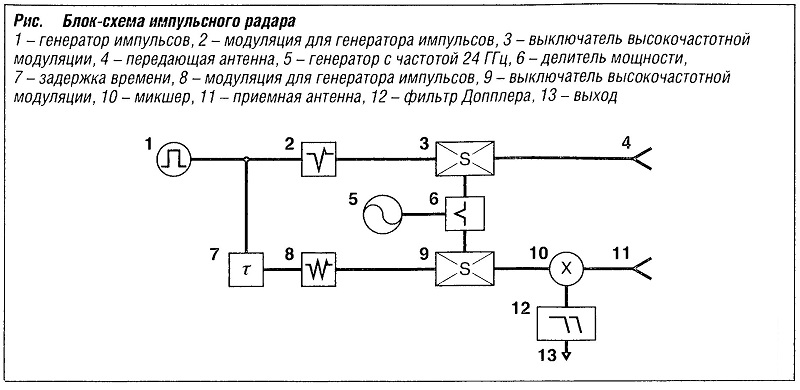
Импульсный радар испускает очень короткие импульсы. Эти сигналы отражаются от предметов и возвращаются к датчику. Требуется измерить время распространения этих сигналов. На рис. «Блок-схема импульсного радара» показана блок-схема импульсного радара. Генератор с частотой, к примеру, 24 ГГц, передает сигналы на делитель мощности. Его выходные сигналы подаются на два высокоскоростных переключателя в двух каналах, изображенных на схеме. В верхнем тракте (передающем) сигналы от генератора импульсов сначала модулируются и затем выдаются на высокоскоростной переключатель (высокочастотный модулирующий переключатель). Из этого блока сигналы проходят на передающую антенну. В нижнем параллельном тракте (принимающем) регулируемая задержка генерирует опорные сигналы, подаваемые на высокоскоростной переключатель в передающем тракте. Принятый отраженный сигнал смешивается с выходным сигналом генератора, что служит когерентным опорным значением для определения измерений частоты в принятом отраженном сигнале. Когерентность в этом контексте означает, что фаза переданного импульса остается сохраненной в опорном сигнале. Изменение определяется фильтром Допплера.
Излучаемая пиковая мощность в 20 дБм EIRP (уровень мощности при опорном значении 1 мВт) дает расстояние измерения 20-50 м, в зависимости от размера и отражающих свойств данного предмета. Минимальное расстояние измерения составляет около 25 см.
Модуляция FMCW
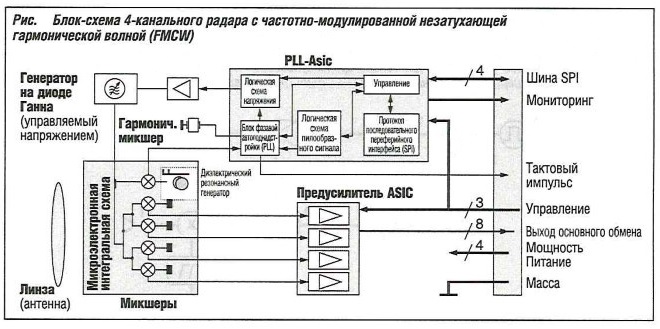
На рис. «Блок-схема 4-х канального радара с частотно-модулированной незатухающей гармонической волной FMCW» показана блок-схема радара FMCW (частотно-модулированная незатухающая гармоническая волны). Генератор на диоде Ганна в эхорезонаторе или новый генератор на базе SiGe параллельно подает сигналы, к примеру, на четыре патч-антенны, расположенные рядом друг с другом и также служащие для одновременного приема отраженных сигналов. Установленная спереди пластмассовая линза Френеля фокусирует передаваемые и принимаемые лучи, относительно оси автомобиля, в горизонтальном и вертикальном направлениях. Характеристики антенны в плане передачи и приема имеют веерообразную форму в четырех разных направлениях из-за смещения антенн от центра. По расстоянию а до транспортных средств, движущихся впереди, и по их относительной скорости Δv можно оценивать изменение ситуации относительно той, при которой они были обнаружены. Этот метод используется для обнаружения нескольких автомобилей.
Направленные ответвители разделяют передаваемые и принимаемые отраженные сигналы. Путем смешивания частоты приема и частоты передачи, находящиеся далее микшеры переносят частоту приема на более низкие частоты (0-300 кГц). Чтобы оценить их, низкочастотные сигналы оцифровываются и проходят высокоскоростной (гармонический) анализ Фурье для определения частот.
Метод работы разъясняется ниже на примере генератора Ганна. Частота генератора на основе диода Ганна непрерывно сравнивается с эталоном частоты диэлектрического резонансного генератора (DRO) и регулируется до определенной заданной величины. В данном случае напряжение питания диода Ганна изменяется до тех пор, пока частота снова не будет соответствовать заданной. Через эту цепь с обратной связью, с пилообразными колебаниями, частота передачи fs генератора Ганна кратковременно повышается и понижается на 300 МГц каждые 100 мс (частотная модуляция). 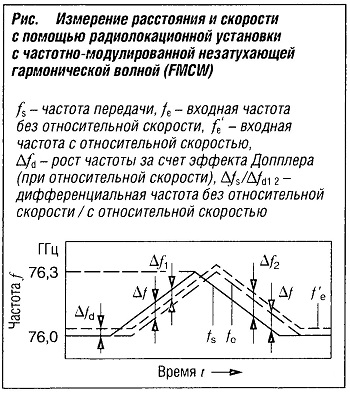 Сигнал, отраженный от впереди идущей машины, изменяется в соответствии со временем его прохождения, как показано на рис. 4, т.е., при увеличении расстояния до впереди идущей машины — путем понижения частоты, а при уменьшении расстояния — путем повышения частоты fe на ту же величину Δf. Разность частот Δf является прямой мерой расстояния а:
Сигнал, отраженный от впереди идущей машины, изменяется в соответствии со временем его прохождения, как показано на рис. 4, т.е., при увеличении расстояния до впереди идущей машины — путем понижения частоты, а при уменьшении расстояния — путем повышения частоты fe на ту же величину Δf. Разность частот Δf является прямой мерой расстояния а:
Δf = (fs -fе) = c1·а
(например, с1 = 2 кГц/м).
Если же между двумя движущимися автомобилями будет дополнительная относительная скорость Δv, то принимаемая частота fе увеличивается (при приближении) или уменьшается, на основании эффекта Допплера, как при возрастании, так и при снижении расстояния между машинами пропорционально величине:
Δfd= c2·Δv
(например, с2 = 512 Гц на м/с).
Иными словами, имеются две дифференциальных частоты Δf1 и Δf2. Их сумма соответствует расстоянию между автомобилями, а разность — относительной скорости Δv их движения (рис. «Измерение расстояния и скорости с помощью радиолокационной установки с частотно-модулированной незатухающей гармонической волной FMCW» ). При увеличении расстояния:
Δf1 =fs-fe = Δf-Δfd = c1·а-c2·Δv
При уменьшении расстояния:
Δf2 =fs-fe = Δf+Δfd = c1·а+c2·Δv
Это значит, что:
a= (Δf2 -Δf1)/2c1
Δv = (Δf2 -Δf1)/2c2
Определение угла смещения объекта
Третьей основной величиной, помимо расстояния и относительной скорости, является боковое смещение (угол) объекта. Единственный способ измерить его — путем испускания луча радара в нескольких направлениях. Затем по отраженным сигналам определяется направление, из которого принят самый сильный отраженный сигнал. Чтобы определить угол, под которым радар находит объект, либо направляется один луч (сканирование), либо параллельно испускаются и анализируются несколько лучей.
Для измерения угла требуются не менее двух перекрывающихся лучей. Усиления амплитуд, измеряемых для определенного объекта в соседних лучах, позволяют сделать вывод об угле обзора. На практике сегодня используется четыре луча, с угловым разрешением 1-2°.
Радар малой дальности (24 ГГц)
Используются два типа радаров малой дальности: узкополосные датчики и ультра широкополосные датчики (UWB). Диапазон узкополосных датчиков составляет несколько МГц в диапазоне ISM (промышленность, наука и медицина) при 24 ГГц и они отличаются низкой разделяемостью объектов. Разделяемость объектов у датчика UWB с типичным диапазоном 5 ГГц — высокая, порядка нескольких сантиметров при удаленности объектов около 1,5 м. Функции безопасности, реализованные с помощью датчиков этого типа (например, датчиков раннего распознавания столкновения) требуют коротких циклов измерения, порядка 2 мс и менее.
Диапазон типичных радарных датчиков малой дальности составляет от 2 до 20-50 м, в зависимости от функции помощи водителю.
Датчики этого типа были впервые представлены в 2005 году в системах адаптивного круиз-контроля (АСС) с помощью при движении в пробках. Здесь используются два радарных датчика малой дальности. Если с помощью этой сенсорной технологии потребуется реализовать дополнительные функции, то спереди и сзади автомобиля потребуется установить до четырех датчиков.
Радар большой дальности
Радар большой дальности (LRR), используемый для адаптивного круиз-контроля (АСС), сканирует зону перед движущимся автомобилем на расстояние до 250 м. Рабочая частота 76,5 ГГц (длина волны λ = 3,8 мм) допускает относительно низкопрофильные конструкции, необходимые в автомобилях.
Лидар
Лидары (лазерные локаторы ИК-диапазона) для адаптивного круиз-контроля (АСС) уже несколько лет используются в Японии. В принципе, лидары работают так же, как и радары, но отличаются от последних тем, что используют электромагнитные волны в инфракрасном диапазоне 800-1000 нм, а не микроволны в миллиметровом диапазоне. Лучи лидара могут иногда значительно заглушаться туманом и условиями плохой видимости, особенно брызгами. Это может, соответственно, уменьшить дальность измерения. Поэтому они подходят для систем безопасности хуже, чем радары.
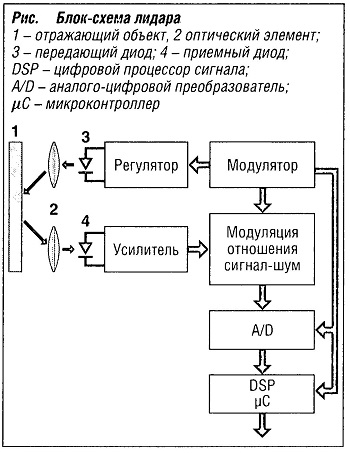 Инфракрасное излучение модулируется по интенсивности, но не по частоте. Блок-схема лидара показана на рис. «Блок-схема лидара«. Лидар создает модулированное инфракрасное излучение, отражаемое от предметов и принимаемое одним или несколькими фотодиодами в датчике. Модуляция может иметь следующие формы: прямоугольные волны, синусоидальные колебания или импульсы. Модулятор передает информацию о модуляции на приемник. Таким образом, принятый сигнал можно сравнить с переданным, чтобы определить либо фазовую разность сигналов, либо время их распространения, и на основании этого вычислить расстояние до объекта. Отношение «сигнал-шум» очень сильно зависит от типа модуляции, наилучшие результаты достигаются при импульсной модуляции. Поэтому импульсная модуляция используется на практике для лидаров большой дальности. Типичные значения длительности импульсов находятся в наносекундном диапазоне. Соответственно, длина импульсов составляет порядка 1 метра. Для достижения точности измерения сантиметрового порядка можно использовать подходящие методы обработки сигналов.
Инфракрасное излучение модулируется по интенсивности, но не по частоте. Блок-схема лидара показана на рис. «Блок-схема лидара«. Лидар создает модулированное инфракрасное излучение, отражаемое от предметов и принимаемое одним или несколькими фотодиодами в датчике. Модуляция может иметь следующие формы: прямоугольные волны, синусоидальные колебания или импульсы. Модулятор передает информацию о модуляции на приемник. Таким образом, принятый сигнал можно сравнить с переданным, чтобы определить либо фазовую разность сигналов, либо время их распространения, и на основании этого вычислить расстояние до объекта. Отношение «сигнал-шум» очень сильно зависит от типа модуляции, наилучшие результаты достигаются при импульсной модуляции. Поэтому импульсная модуляция используется на практике для лидаров большой дальности. Типичные значения длительности импульсов находятся в наносекундном диапазоне. Соответственно, длина импульсов составляет порядка 1 метра. Для достижения точности измерения сантиметрового порядка можно использовать подходящие методы обработки сигналов.
Горизонтальное и вертикальное разрешение достигается либо путем многолучевой конфигурации, либо путем механического сканирования. Преимущество механического сканирования состоит в очень высоком угловом разрешении при использовании всего одного приемно-передающего блока. Лучевое сканирование реализуется либо путем использования поворотного зеркала, либо путем перемещения оптического элемента передатчика или приемника вперед-назад.
В отличие от большинства радарных датчиков, лидар не измеряет непосредственно скорость объекта. Скорость вычисляется путем дифференцирования сигнала расстояния, в результате происходит определенная задержка и ухудшается качество сигнала. С другой стороны, хорошее горизонтальное разрешение сканирующего лидара намного превосходит разрешение типичного современного радарного датчика.
Видеотехнология
Изображения несут в себе наибольшую часть информации, воспринимаемой человеком. Следовательно, очевидным методом в контексте разработки систем повышения безопасности при движении (DAS) является запись изображений, извлечение из них нужных деталей и выявление опасных ситуаций посредством обработки изображений.
На первом этапе на рынок были выведены функции на основе видео — например, систем ночного видения, систем слежения за дорожной разметкой и распознавания дорожных знаков. На втором этапе функции, корректирующие динамику автомобиля через тормоза, рулевое управление и дроссельную заслонку (прежде всего при взаимодействии нескольких датчиков) открывают новые, эффективные перспективы для надежного предотвращения ДТП и смягчения их последствий.
В этом контексте в автомобильной системе выполняются две различные задачи. Когда требуется создать особенно контрастное, яркое изображение, необходимое в системах ночного видения, производится обработка изображения. Затем обработанное изображение выводится непосредственно на дисплей. Вторая задача предусматривает извлечение конкретного содержания изображения с помощью специальных алгоритмов (например, распознавание дорожных знаков). Принятую информацию можно затем использовать для предупреждения водителя сигналами на дисплее или активации соответствующих исполнительных органов.
Основные принципы фотосчитывания
Когда полупроводник освещается фотонами, создаются пары «электрон-дырка». Они, в свою очередь, генерируют электрическое поле, рекомбинируют и создают фотоэлектрический ток. Здесь показатель «квантовая эффективность η» описывает количество пар «электрон-дырка», создаваемых одним фотоном.
 Практически все проникающие в полупроводник фотоны преобразуются в электрические заряды. Однако существует сильная спектральная зависимость от средней длины поглощения, в которой возникает это фотопреобразование. Коротковолновый свет в принципе поглощается на поверхности полупроводника, а длинноволновый проникает глубоко внутрь него. Поэтому изображения с большим содержанием волн красного и инфракрасного диапазонов (например, системы улучшения ночного видения) имеют гораздо меньший контраст, чем изображения, записанные в коротковолновой части спектра. Поэтому для систем ночного видения важно обрабатывать изображения в сторону улучшения контрастности. В системах любительского уровня перед камерой часто устанавливаются оптические фильтры для отсечки инфракрасной части спектра.
Практически все проникающие в полупроводник фотоны преобразуются в электрические заряды. Однако существует сильная спектральная зависимость от средней длины поглощения, в которой возникает это фотопреобразование. Коротковолновый свет в принципе поглощается на поверхности полупроводника, а длинноволновый проникает глубоко внутрь него. Поэтому изображения с большим содержанием волн красного и инфракрасного диапазонов (например, системы улучшения ночного видения) имеют гораздо меньший контраст, чем изображения, записанные в коротковолновой части спектра. Поэтому для систем ночного видения важно обрабатывать изображения в сторону улучшения контрастности. В системах любительского уровня перед камерой часто устанавливаются оптические фильтры для отсечки инфракрасной части спектра.
Фотоэлектрический ток растет пропорционально, на много порядков, падающему световому потоку и строго линеен в широком динамическом диапазоне. Именно это делает полупроводниковые фотодатчики такой привлекательной перспективой для многочисленных систем массового спроса и измерительных систем.
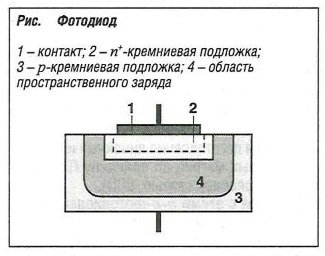
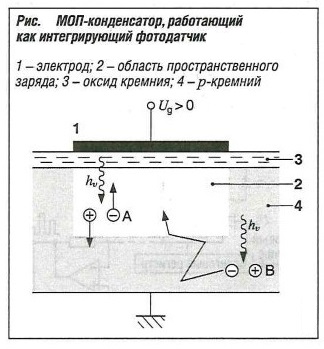
Двумя наиболее важными фоточувствительными полупроводниковыми структурами являются фотодиод (рис. «Фотодиод» ) и металлооксидный полупроводниковый конденсатор (МОП-конденсатор, рис. «МОП-канденсатор, работающий как интегрирующий фотодатчик» ), используемый в ПЗС-датчиках приборах с зарядовой связью. Обе эти полупроводниковых структуры изготавливаются по стандартным полупроводниковым технологиям.
 Фотодиод состоит из сочетания полупроводниковых материалов с различными проводящими свойствами. В области пространственного заряда на стыке двух полупроводниковых материалов существует электрическое поле. В то же время область пространственного заряда имеет определенную емкость, обратно пропорциональную ее толщине. Фотодиоды типично заряжаются до определенного потенциала и затем подвергаются воздействию света. Теперь фотоэлектрически генерируемые заряды распространяются по всей области пространственного заряда и накапливаются в фотодиодном конденсаторе. Остаточное напряжение измеряется сразу после облучения фотодиода светом. Разница между этим напряжением и напряжением сброса является мерой падающего света.
Фотодиод состоит из сочетания полупроводниковых материалов с различными проводящими свойствами. В области пространственного заряда на стыке двух полупроводниковых материалов существует электрическое поле. В то же время область пространственного заряда имеет определенную емкость, обратно пропорциональную ее толщине. Фотодиоды типично заряжаются до определенного потенциала и затем подвергаются воздействию света. Теперь фотоэлектрически генерируемые заряды распространяются по всей области пространственного заряда и накапливаются в фотодиодном конденсаторе. Остаточное напряжение измеряется сразу после облучения фотодиода светом. Разница между этим напряжением и напряжением сброса является мерой падающего света.
МОП-конденсатор (рис. «МОП-канденсатор, работающий как интегрирующий фотодатчик» ) состоит из полупроводникового материала, покрытого тонким оксидным слоем. На оксидный слой наносится металлический проводящий слой. При подаче положительного напряжения на металлический электрод МОП-элемента под изолирующим оксидным слоем создается область пространственного заряда стационарных положительных зарядов. В случае падения света через прозрачный изолированный электрод (переднее облучение) или через подложку (заднее облучение) в этой зоне собираются фотоэлектрически генерируемые электроны без возможности рекомбинирования и опока.
Типичное значение емкости фотодиода и МОП-конденсатора составляет 0,1 фФ/мкм.
ПЗС-матрицы
Для изготовления датчиков формирования изображений многие фотодиоды или МОП-конденсаторы соединяются в матрицы с большим числом пикселов. В то время как выходные сигналы фотодиодов соответствуют мгновенным значениям светового потока (освещенности), следующие две структуры являются, по своей сути, интегрирующими. 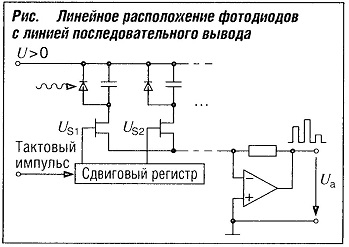 Их сигнал соответствует общему количеству фотонов, проникших в датчик за время освещения. Такие датчики, в основном, нужны для изготовления линейных или одноплоскостных матриц по принципу ПЗС (приборы с зарядовой связью, CCD).
Их сигнал соответствует общему количеству фотонов, проникших в датчик за время освещения. Такие датчики, в основном, нужны для изготовления линейных или одноплоскостных матриц по принципу ПЗС (приборы с зарядовой связью, CCD).
В случае с этими р-гс-фотодиодами лишь небольшая часть р-я-перехода чувствительна к излучению из-за экрана с вакуумным напылением. Но фотоэлектрически генерируемые заряды распространяются по всей области пространственного заряда и накапливаются там (в МОП-конденсаторе). Когда канальный полевой униполярный МОП-транзистор закрыт, они могут опекать к совместно используемой сигнальной линии (видеовыходу). МОП-транзистором управляет генератор синхронизирующих импульсов через сдвиговый регистр (рис. «Линейное расположение фотодиодов с линией последовательного вывода«). Заряды, последовательно протекающие через видеовыход, являются мерой дозы излучения фотодиодов, активируемых в каждом случае.
Чтобы после облучения можно было сместить измерительный заряд по горизонтали, рядом с освещаемой зоной или коллекторным электродом располагаются дополнительные электроды, как показано на рис. «МОП-конденсатор с задней подсветкой и передающими электродами для переноса заряда«; вовремя интеграционной фазы они находятся на нулевом потенциале. Если затем увеличить потенциал бокового переходного электрода на положительное значение при одновременном уменьшении потенциала коллекторного электрода, то заряд можно сместить на соседний МОП-элемент, защищенный экраном от падения света.
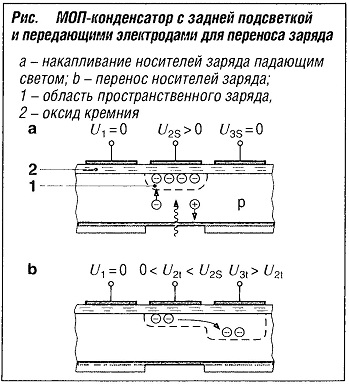 Этот принцип переноса заряда формирует основу приборов с зарядовой связью. Согласно этому принципу аналоговые заряды можно смещать или передавать через многие станции до полного преобразования в конце цепочки преобразований посредством усилителя заряда, к примеру, в сигнал напряжения, который можно подать на быстрый аналогово-цифровой преобразователь.
Этот принцип переноса заряда формирует основу приборов с зарядовой связью. Согласно этому принципу аналоговые заряды можно смещать или передавать через многие станции до полного преобразования в конце цепочки преобразований посредством усилителя заряда, к примеру, в сигнал напряжения, который можно подать на быстрый аналогово-цифровой преобразователь.
Этот метод передачи заряда, который можно также рассматривать как аналоговый сдвиговый регистр, обеспечивает простую настройку длинных линейных множественных структур, а также матричных структур. Мельчайший элемент этих структур также называют пикселом (pixel, сокращение от picture element). На данный момент максимально возможное количество пикселов для линейных датчиков составляет около 6000, а у матричных — порядка 2000-2000, т.е. четыре миллиона. Сегодняшние датчики для формирования изображений в автомобилях работают с разрешением менее одного миллиона пикселов. Для более сложных автомобильных систем желательно иметь гораздо большее количество писелов. В камерах уровня потребительской электроники используются датчики с более чем 10 миллионами пикселов.
Размер пикселов, принимающих свет от традиционной линзы для передачи изображений, сегодня варьируется в диапазоне 5-20 мкм. Соответственно, площадь матрицы составляет порядка 1 см2. Если требуется уменьшить размер отдельных пикселов для увеличения разрешения или стоимости матрицы, важно помнить, что повлечет за собой уменьшение количества фотонов, попадающих на пиксел. Таким образом, ограничения по уменьшению размера пикселов диктуются неизбежным ухудшением соотношения «сигнал/шум»; с увеличением разрешения растет уровень цифрового шума.
Ограничивается даже заряд, поглощаемый отдельными, интегрирующими ячейками. При превышении этого предела заряд может «перетечь» в соседние ячейки. Это также называют эффектом расплывания изображения, который в принципе ограничивает динамическую реакцию «светлый/темный» в ПЗС-технологии. Даже с дополнительными мерами против расплывания изображения эту динамическую реакцию едва удается увеличить сверх величины около 50 дБ без дополнительных мер, таких как регулируемые экран и время выдержки.
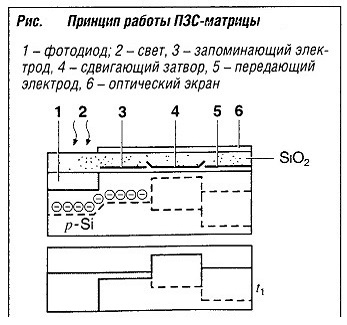
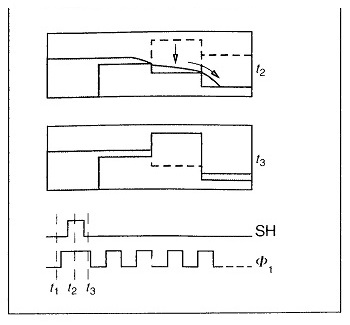
Как показано на рис. «Принцип работы ПЗС-матрицы«, создаваемые в фотодиоде фотоэлектрические заряды сначала смещаются из зоны экспозиции посредством перемещающихся электродов и управляющих сигналов в сторону, в столбцовую структуру. Затем заряды всех столбиков по тому же принципу одновременно смещаются вниз, где они рядами перетекают в горизонтальный «сдвиговый регистр». Оттуда они последовательно считываются и обрабатываются.
 |
 |
Сегодня ПЗС-матрицы — наиболее распространенная полупроводниковая технология с датчиками для формирования изображений. Однако ограниченная реакция «светлый/темный», относительно высокая потребляемая мощность по сравнению с другими технологиями при трех разных рабочих напряжениях, и ограниченный диапазон температур не позволили им получить широкого распространения в автомобилях.
КМОП-матрицы
Сегодня КМОП-матрицы являются более перспективным решением по сравнению с ПЗС-матрицами, и уже широко используются во многих областях. Здесь понятие «КМОП- матрица» может внести путаницу, потому что КМОП (сокращение от «комплементарный металлооксидный полупроводник») — это особая полупроводниковая технология. С другой стороны, ПЗС-матрица тоже содержит МОП-структуры (структуры металлооксидных полупроводников). КМОП-матрицы существенно отличаются от ПЗС-матриц не только технологией изготовления, но и рядом особенностей.
 Пикселы здесь считываются не последовательно, а по аналогии с ячейкой памяти в оперативном запоминающем устройстве, могут активироваться по-отдельности, так как расположены в матричной структуре. С этой целью для каждого пиксела также интегрирована активная электроника (APS, активный датчик пиксела).
Пикселы здесь считываются не последовательно, а по аналогии с ячейкой памяти в оперативном запоминающем устройстве, могут активироваться по-отдельности, так как расположены в матричной структуре. С этой целью для каждого пиксела также интегрирована активная электроника (APS, активный датчик пиксела).
Интегрирующие фотодиоды не используются. Вместо них используются те, что в большой степени не зависят от времени выдержки.
Значения яркости не пропорционально преобразуются в электрические сигналы, а логарифмируются. Поэтому они имеют схожую характеристику с человеческим глазом. Только это позволило увеличить динамическую реакцию «светлый/темный» до более чем 100 дБ без дополнительных мер.
КМОП-матрицы реализуются не на основе стандартной КМОП-технологии. Вместо этого используется КМОП-технология, оптимизированная до фотоэлектрического элемента, который, благодаря гораздо меньшей потребляемой мощности, чем у ПЗС-матриц, позволяет добавлять на матричный чип другую активационную и оценочную электронику.
Поскольку время доступа к отдельным пикселам составляет порядка нескольких десятков нс, КМОП-матрицы допускают несколько более высокую частоту смены кадров, особенно при использовании возможности считывания только фрагментов изображения (субфрейминг), чего не позволяют сделать ПЗС-матрицы.
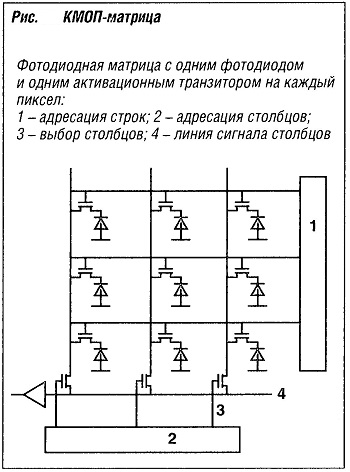
На рис. «КМОП-матрица» показан фрагмент структуры КМОП-матрицы. Отдельный пиксел состоит из фотодиода и канального полевого униполярного МОП-транзистора (M0SFET) в качестве переключающего элемента. Каждый пиксел можно индивидуально активировать и считывать с него сигналы через матричную структуру.
 Все фотодиоды заряжаются до противодействующего напряжения смещения величиной около 5 В. Отдельные пикселы разряжаются до определенного напряжения под влиянием падающего света. Сигнал пискеля считывается путем активации соответствующих формирователей строк и столбцов, в результате чего создается проводное соединение от пиксела к выходному усилителю. Затем пиксел снова заряжается через это соединение до исходного противодействующего напряжения. Усилитель измеряет необходимый заряд для каждого пиксела. Это точно соответствует фотозаряду, накопленному пикселом. Таким образом, каждый пиксел можно считывать индивидуально, а время выдержки можно определить через внешнюю схему выборки адреса.
Все фотодиоды заряжаются до противодействующего напряжения смещения величиной около 5 В. Отдельные пикселы разряжаются до определенного напряжения под влиянием падающего света. Сигнал пискеля считывается путем активации соответствующих формирователей строк и столбцов, в результате чего создается проводное соединение от пиксела к выходному усилителю. Затем пиксел снова заряжается через это соединение до исходного противодействующего напряжения. Усилитель измеряет необходимый заряд для каждого пиксела. Это точно соответствует фотозаряду, накопленному пикселом. Таким образом, каждый пиксел можно считывать индивидуально, а время выдержки можно определить через внешнюю схему выборки адреса.
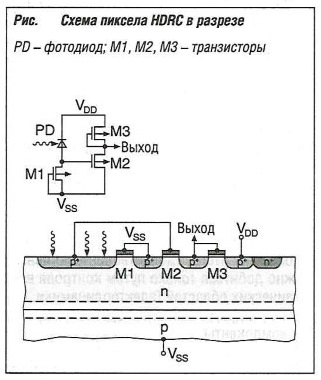
Эта APS-технология, при которой в матрицу интегрируется транзистор MOSFET, обеспечивает низкий уровень шумов. Самый простой пиксел APS состоит из фотодиода и трех MOSFET. Fla рис. «Схема пиксела HDRC в разрезе» схематично изображена структура пиксела HDRC (КМОП — технология с расширенным динамическим диапазоном). Светочувствительным элементом этого варианта КМОП-матрицы является фотодиод, поляризованный в направлении блокировки, последовательно соединенный с р-канальным МОП-транзистором (М1), работающим ниже напряжения открывания. Диодный ток, пропорциональный освещенности, также должен протекать через блокированный транзистор. Напряжение его потокового перехода UGs в широком диапазоне практически идеально логарифмически зависит от протекающего фототока. Два других транзистора М2 и М3 служат для развязки сигнала, подаваемого через мультиплексор на быстрый 10-битный аналого-цифровой преобразователь.
Технология определения дальности
Формирователи изображений для определения дальности — это датчики, все еще находящиеся на стадии разработки, сочетающие характеристики лидаров и видеокамер. Их можно считать видеодатчиками с дополнительной функцией измерения расстояния до ближайшего объекта каждым пикселом камеры. Наиболее известной технологией в современном автомобилестроении является фотонное смешивающее устройство (PMD).
Находящийся перед автомобилем объект подвергается модулированному облучению светодиодами в диапазоне, близком к инфракрасному. Для принятого фоточувствительным датчиком сигнала также оценивается время его распространения. Это создает трехмерное изображение окружающей автомобиль обстановки. Если все еще существующие проблемы можно преодолеть, то технологию PMD следует рассматривать как серьезную альтернативу другим датчикам в коротком и среднем диапазонах дальности.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: