Во многих современных конструкциях автомобилей, имеющих клинообразную форму и, как следствие, низкий коэффициент аэродинамического сопротивления, значительно ограничена обзорность сзади, из-за чего затруднено или даже невозможно распознавание препятствий позади автомобиля. Вот о том, какими бывают системы помощи при парковке автомобилей, мы и поговорим в этой статье.

Вспомогательное средство парковки с ультразвуковыми датчиками
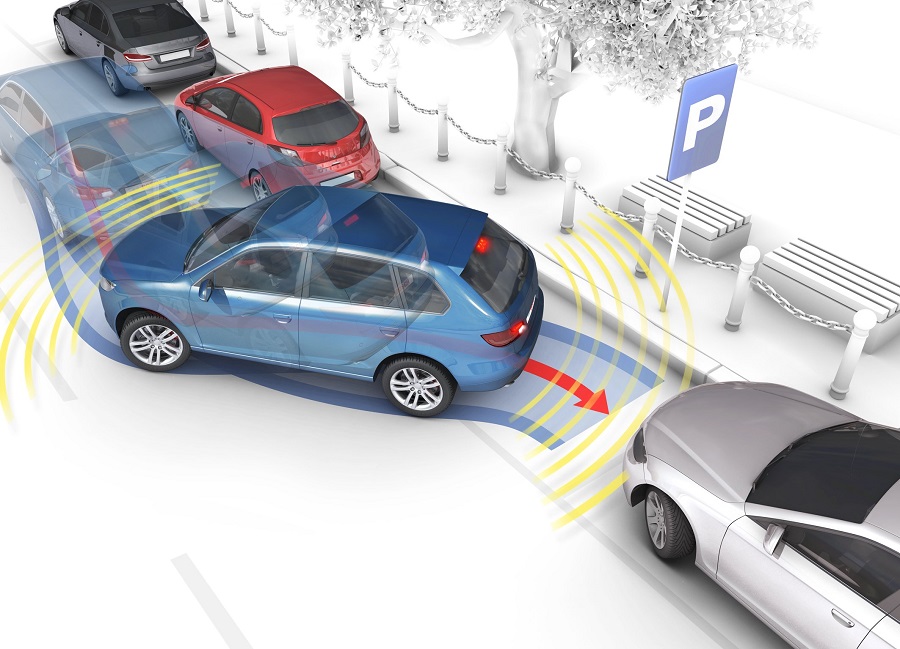
Эффективную помощь водителю при установке автомобиля на стоянку оказывают вспомогательные средства в виде ультразвуковых датчиков. С их помощью контролируется зона приблизительно от 20 до 250 см позади или, при необходимости, впереди автомобиля. Система обнаруживает препятствия, и расстояние от них до автомобиля обозначается визуальными или звуковыми сигналами. Многие производители автомобилей предлагают вспомогательные средства для парковки в качестве дополнительной опции. В некоторых автомобилях такие средства устанавливаются в стандартной комплектации. Для оборудования уже сошедших с конвейера автомобилей предлагаются системы, адаптируемые для различных моделей автомобилей. Эти системы должны иметь возможность работать на как можно более разнообразных моделях. Угол установки и расстояние между датчиками определяются для каждой конкретной модели автомобиля. Эти параметры принимаются во внимание в алгоритмах обработки данных.
Система парковки
 Средства помощи при парковке состоят из следующих основных компонентов:
Средства помощи при парковке состоят из следующих основных компонентов:
- ЭБУ,
- Элемент предупреждения водителя.
- Ультразвуковые датчики.
Система парковки различаются числом датчиков и их излучательной способностью.
Как правило, если система предупреждения установлена только в задней части автомобиля, она имеет четыре ультразвуковых датчика в заднем бампере. Некоторые автомобили большого размера, например, внедорожники, оборудуются шестью датчиками.
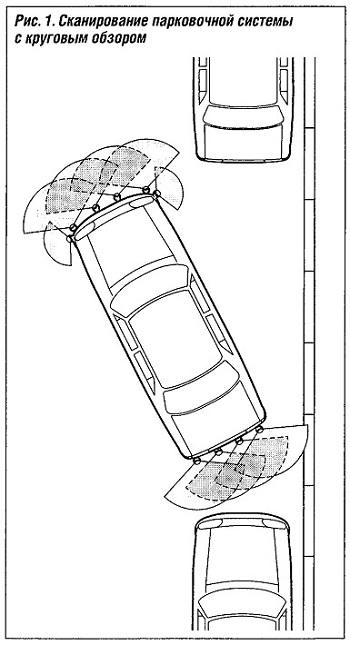
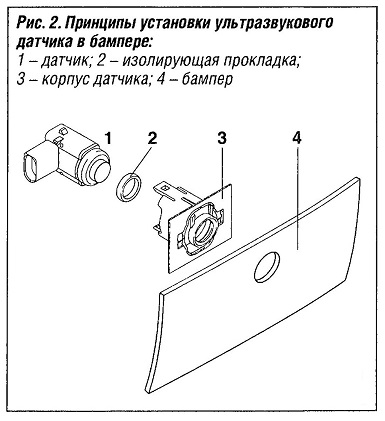
Система предупреждения в передней части автомобиля оборудуется четырьмя или шестью дополнительными ультразвуковыми датчиками в переднем бампере (рис. «Сканирование парковочной системы с круговым обзором» ). Датчики надежно крепятся на бампере в определенных положениях с помощью специальных кронштейнов (рис. «Принципы установки ультрозвукового датчика в бампере» ).
Эта система приводится в действие автоматически при включении задней передачи. Система предупреждения в передней части автомобиля автоматически приводится в действие, если скорость автомобиля падает ниже порога приблизительно в 15 км/ч. Во время работы функция самопроверки обеспечивает постоянное слежение за исправностью работы всех компонентов.
Ультразвуковой датчик
Сам датчик состоит, в основном, из пластмассового корпуса с гнездами для подключения и алюминиевой мембраны, к внутренней стороне которой подсоединен пьезокерамический резонатор в форме тонкого диска. Этот резонатор может работать, как передатчик (динамик) или как приемник (микрофон). Электронные схемы для включения датчика и обработки сигнала расположены на печатной плате внутри корпуса.
 |
 |
Они электрически соединены с ЭБУ с помощью трех выводов, два из которых, питающие. Третий, служащий в качестве двунаправленной сигнальной линии, используется для активизации функции передачи сигналов и принятия возвращенного сигнала в ЭБУ. Когда датчик получает от блока управления цифровой импульс на передачу сигнала, электронная цепь подает на алюминиевую мембрану импульсы возбуждения с квадратной формой волны на резонансной частоте, вызывая вибрацию мембраны, которая испускает ультразвуковые волны с частотой приблизительно 48 кГц (рис. «Блок-схема ультрозвукового датчика» ). Диафрагма, которая со временем приходит в состояние покоя, снова начинает вибрировать под действием звуковых волн, отраженных от препятствия. Эти вибрации преобразуются пьезоэлектрической пластиной в аналоговый электрический сигнал, который затем усиливается и преобразуется в цифровой.
Измерение дальности
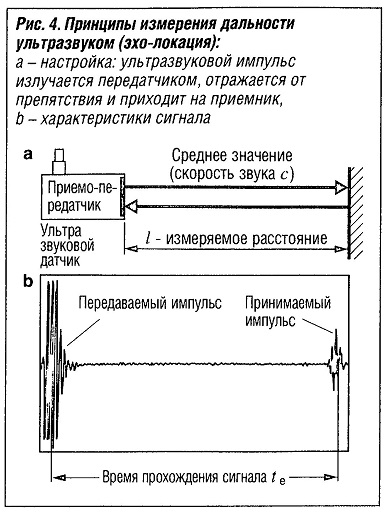
При определении дальности при помощи ультразвука (рис. «Принцип измерения дальности ультразвуком (эхо-локация)») датчики излучают ультразвуковые импульсы и измеряют время, за которое импульсы, отраженные от объектов, возвращаются обратно. Расстояние l между датчиком и ближайшим объектом вычисляется из соотношения времени tе возврата первого отраженного импульса и скорости звука с по следующей формуле:
l = 0,5 tе c
где:
tе— время возврата ультразвукового сигнала;
с — скорость звука в воздухе (с ≈ 340 м/с).
Геометрическое расстояние а между препятствием и передней частью автомобиля определяется методом триангуляции на основе полученных данных (расстояний b и с) от двух ультразвуковых датчиков, установленных на расстоянии d друг от друга (рис. «Определение расстояния до препятствия при помощи ультразвука» ).
 |
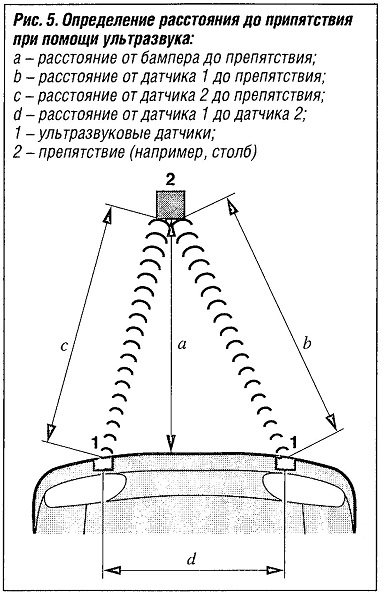 |
Расстояние а рассчитывается по следующей формуле:
a = √(c2— (d2 + c2 — b2)2/4d2)
 Чтобы система могла исследовать как можно более широкую зону, ее детекторные характеристики должны отвечать определенным требованиям. Горизонтальная часть характеристики должна иметь более широкий угол охвата. С другой стороны, по вертикали требуется достичь компромиссной характеристики. Чтобы избежать помех из-за отражений от поверхности дороги, угол обзора не должен быть слишком широким, однако, существующие препятствия должны обнаруживаться надежно. На рис. «Схема излучения антенны ультрозвукового датчика» показаны характеристики излучения по горизонтали и вертикали.
Чтобы система могла исследовать как можно более широкую зону, ее детекторные характеристики должны отвечать определенным требованиям. Горизонтальная часть характеристики должна иметь более широкий угол охвата. С другой стороны, по вертикали требуется достичь компромиссной характеристики. Чтобы избежать помех из-за отражений от поверхности дороги, угол обзора не должен быть слишком широким, однако, существующие препятствия должны обнаруживаться надежно. На рис. «Схема излучения антенны ультрозвукового датчика» показаны характеристики излучения по горизонтали и вертикали.
Современные датчики позволяют изменять угол обнаружения препятствия в определенных пределах, что позволяет добиться оптимальной настройки в соответствии с геометрией бампера и корпуса автомобиля. Компактная конструкция этих датчиков является благоприятным фактором, в особенности, учитывая требования к улучшенной безопасности пешеходов в конструкции бамперов.
Электронный блок управления (ЭБУ)
ЭБУ содержит стабилизатор напряжения для датчиков, интегрированный микропроцессор и все промежуточные схемы, необходимые для адаптации различных входных и выходных сигналов. Программное обеспечение предполагает выполнение следующих функций:
- Активация датчиков и прием отраженных сигналов;
- Измерение времени получения отраженного сигнала и расчет расстояния до препятствия;
- Активация системы предупреждения;
- Оценка входных сигналов от систем автомобиля (например, сигнал о включении задней передачи);
- Контролирование работы компонентов системы, включая накопление отказов;
- Обеспечение функций диагностики.
Предупреждающие элементы
Предупреждающие элементы, сигнализирующие о критическом расстоянии до препятствия, обычно включают сочетание звукового и оптического сигналов. В настоящее время используются как светодиодные (LED), так и жидкокристаллические (LCD) оптические сигналы.
Если в комбинации приборов или на центральной консоли установлен монитор, собственный автомобиль на нем может быть показан вместе с препятствием, например, в проекции сверху. Это обычно улучшает восприятие ситуации водителем.
Помощник при парковке
Помощник при парковке основан на ультразвуковых датчиках и построен на принципе последовательных операций. На каждой стадии выполняется самостоятельная операция. Систему можно расширить, установив дополнительные датчики по бортам автомобиля.
Измерение свободного пространства для парковки
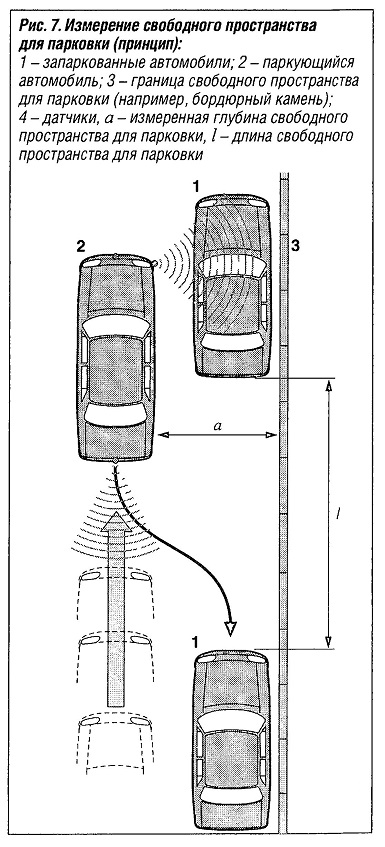 После включения системы ультразвуковой датчик, установленный сбоку автомобиля, измеряет длину и глубину свободного места для парковки, когда автомобиль проезжает мимо него (рис. «Измерение свободного пространства для парковки» ). Длина измеряется путем оценки сигналов от счетчика оборотов колеса. Затем помощник при парковке сообщает водителю, достаточна ли длина свободного места для парковки. Если в пределах свободного места имеются препятствия, водитель получает соответствующий сигнал. Однако, выполнение этой функции возможно только, если дальность действия датчиков составляет не менее, чем приблизительно 4,5 м.
После включения системы ультразвуковой датчик, установленный сбоку автомобиля, измеряет длину и глубину свободного места для парковки, когда автомобиль проезжает мимо него (рис. «Измерение свободного пространства для парковки» ). Длина измеряется путем оценки сигналов от счетчика оборотов колеса. Затем помощник при парковке сообщает водителю, достаточна ли длина свободного места для парковки. Если в пределах свободного места имеются препятствия, водитель получает соответствующий сигнал. Однако, выполнение этой функции возможно только, если дальность действия датчиков составляет не менее, чем приблизительно 4,5 м.
Устройство помощи при парковке, обеспечивающее водителя информацией
После измерения длины свободного места для парковки геометрия окружающей обстановки может быть использована для выбора оптимальной траектории для парковки. При парковке система может давать водителю рекомендации относительно того, как правильней поворачивать рулевое колесо, чтобы, как можно лучше завести автомобиль в место парковки. Во время парковки траектория постоянно пересчитывается и отображается на дисплее. Для этого устройство помощи при парковке должно постоянно получать сигналы от датчика угла поворота рулевого колеса (ESP).
Устройство помощи при парковке с функцией рулевого управления (автоматическая паркоска)
Следующая ступень развития систем парковки — система с функцией электрического рулевого управления. Чтобы создать такую систему, она должна иметь функцию электропривода рулевого управления.
После измерения свободного пространства для парковки и включения задней передачи, водитель убирает руки с рулевого колеса и действует только при помощи педалей акселератора и тормоза. Устройство помощи при парковке принимает на себя управление рулем самостоятельно. Такая функция уже предлагается в некоторых стандартных автомобилях среднего размера в верхнем сегменте рынка.
Дальнейшие возможности развития парктроников
Ультразвуковые датчики с увеличенной дальностью (приблизительно до 4,5 м) позволяют обнаруживать объекты в «слепых зонах» автомобиля. Это означает, что датчики имеют много функций. Выявляются опасные ситуации, вызванные присутствием других автомобилей и их движением, и водитель получает предупредительные сообщения. Система не подает предупреждений относительно автомобилей, припаркованных на обочине, или приближающихся по дороге.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: