
Современные системы цифровой обработки данных позволяют значительно расширить возможности управления агрегатами автомобиля. Многие параметры могут контролироваться одновременно, что позволяет агрегатам работать оптимально. Блок управления принимает сигналы датчиков, обрабатывает их и выдает управляющие сигналы для исполнительных механизмов.
Программа управления (программное обеспечение) находится в памяти блока управления. Выполнение программы принимает на себя микроконтроллер.
Применение блока управления
К блоку управления предъявляются жесткие требования. Он подвергается высоким нагрузкам из-за:
- Экстремальных температур окружающей среды (в нормальных условиях эксплуатации от -40°С до + 60…125°С);
- Резких перепадов температуры;
- Воздействия эксплуатационных материалов (масло, топливо и т. д.);
- Влажности окружающей среды;
- Механических нагрузок, например, вибрации от двигателя.
Блок управления должен нормально работать даже при пуске от недостаточно заряженной аккумуляторной батареи (например, при холодном пуске) и при высоком напряжении заряда (колебания напряжения бортовой сети). Кроме того, при создании подобных блоков предъявляются высокие требования к электромагнитной совместимости с другими приборами бортового электрооборудования, а также к уровню излучения высокочастотных помех.
Устройство ЭБУ
Печатная плата с электронными элементами (рис. «Устройство блока управления ЭБУ») помещается в металлическом корпусе. Датчики, исполнительные механизмы и кабели подачи напряжения соединяются с блоком управления через многоштыревой штекер 4. Оконечные каскады 6 большой мощности для непосредственного управления исполнительными механизмами расположены в корпусе блока управления таким образом, что от них обеспечивается очень хороший отвод тепла на корпус.
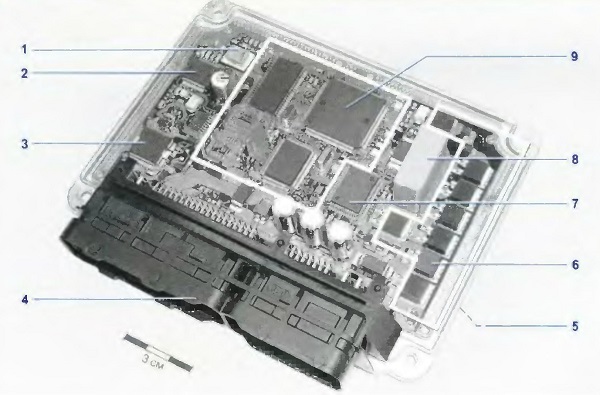
Рис. Устройство блока управления. 1. Датчик атмосферного давления 2. Импульсный источник питания со стабилизацией напряжения 3. Оконечный каскад малой мощности 4. Многоштыревой штекер 5. Микросхема управления шиной последовательного интерфейса CAN и общие входные и выходные схемы (располагаются на нижней стороне платы и поэтому на фото не видны) 6. Оконечный каскад большой мощности 7. Микросхема управления оконечным каскадом (ASICl) 8. Бустер накопитель напряжения (для системы Common Rail) 9. Микропроцессор
При установке блока управления на двигатель тепло от корпуса может через встроенную радиаторную пластину передаваться топливу, которое омывает блок управления. Такой охладитель блока управления используется только на грузовых автомобилях. Для установки непосредственно на дизель без охлаждения применяется компактная, термически защищенная версия блока управления.
Наибольшее число электронных конструктивных элементов выполнено по технологии поверхностного монтажа конструктивных элементов SMD (Surface Mounted Devices). Это дает возможность получить особо компактные и легкие конструкции. Только некоторые мощные конструктивные элементы крепятся при помощи разъемных соединений.
Обработка данных в блоке управления
Входные сигналы
Датчики наряду с исполнительными механизмами образуют периферию электронной системы управления, в то время как блок управления является центром обработки данных. Электрические сигналы от датчиков передаются к блоку управления по кабельной разводке и штекерам. Эти сигналы могут быть аналоговыми, цифровыми и импульсными.
Аналоговые входные сигналы
Аналоговые входные сигналы могут иметь любое (в определенных пределах) значение напряжения. Примерами физических величин, которые передаются аналоговыми сигналами, могут служить расход воздуха, напряжение аккумуляторной батареи, давление во впускном тракте и давление наддува, а также температура охлаждающей жидкости и воздуха на впуске.
Они преобразуются аналого-цифровым преобразователем блока управления в цифровые значения, с которыми может работать микропроцессор. Максимальное разрешение этих сигналов осуществляется ступенями по 5 мВ на бит (около 1000 ступеней).
Цифровые входные сигналы
Цифровые входные сигналы имеют только два значения: «High» (логическая единица (1)) и «Low» (логический ноль (0)).
Примеры входных цифровых сигналов — это сигналы выключателей (вкл/выкл) или цифровые сигналы датчиков такие, как импульсы частоты вращения датчика Холла или магниторезистивного датчика.
Они могут непосредственно обрабатываться микроконтроллером.
Импульсные входные сигналы
Импульсные входные сигналы от индуктивных датчиков, информирующие о частоте вращения коленчатого вала и положении опорной метки, обрабатываются в соответствующей части схемы блока управления. При этом мешающие импульсы (помехи) подавляются, и импульсные сигналы преобразуются в прямоугольные (на графике) цифровые сигналы.
Подготовка сигналов
Входные сигналы ограничиваются схемой защит ы до необходимого уровня напряжения. Полезные сигналы фильтруются от наложенных помех и в случае необходимости усиливаются до уровня напряжений в диапазоне 0…5 В.
Подготовка сигнала в зависимости от устройства датчика может происходить частично или даже полностью в нем самом.
Обработка сигнала
Блок управления — это центр запуска функций управления работой дизеля (рис. «Обработка сигналов блоком управления»). В нем реализуются алгоритмы управления и регулирования.
Входные сигналы, передаваемые датчиками и иными системами, служат в качестве входных величин. При поступлении в блок эти сигналы сравниваются с эталонными значениями и идентифицируются. Далее с помощью программы рассчитываются выходные сигналы.
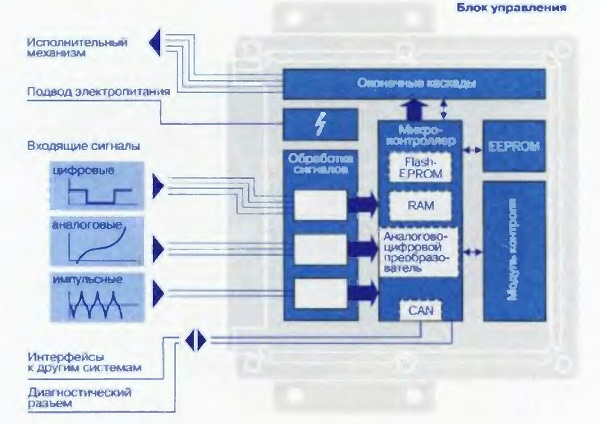
Рис. «Обработка сигналов блоком управления»
Микроконтроллер
Микроконтроллер — это центральный конструктивный элемент блока управления. Он управляет последовательностью функций. В микроконтроллер, кроме управляющего модуля CPU (Central Processing Unit) или микропроцессора, на микрочипе встроены еще входные и выходные каналы, таймер, модули ROM и RAM, серийные согласующие устройства и другие периферийные блоки. Кварц вырабатывает тактовые импульсы для микроконтроллера.
Память для программ и данных
Микроконтроллер для расчетов нуждается в программе (программном обеспечении). Она загружается в форме двоичных числовых значений, разделенных на наборы данных, в память для программ.
Модуль CPU считывает эти величины, интерпретирует их как команды и выполняет эти команды по очереди. Программа хранится в постоянном запоминающем устройстве (ПЗУ), включая модули памяти ROM, EPROM или Flash-EPROM. Кроме того, в этом ПЗУ хранятся специфические данные (отдельные значения, характеристики и поля характеристик). При этом речь идет о постоянных параметрах, которые не могут изменяться при эксплуатации транспортного средства. Они влияют на ход процесса управления и регулирования программы.
ПЗУ может быть интегрировано в микроконтроллер и при необходимости дополнительно расширено (например, внешними модулями памяти EPROM или Flash-EPROM).
Модуль памяти ROM
Основное ПЗУ может быть выполнено в виде модуля памяти ROM (Read Only Memory). Оно содержит информацию, предназначенную только для чтения, которая загружается при изготовлении модуля и после этого уже не может быть изменена. Объем памяти модуля ROM, интегрированного в микроконтроллер, ограничен. Для сложных систем требуются дополнительные модули памяти.
Модуль памяти EPROM
Модуль памяти EPROM (Erasable Programmable Read Only Memory, т.е. стираемое и перепрограммируемое ПЗУ) хранит информацию, которая может стираться облучением ультрафиолетовыми лучами и при помощи устройства программирования снова записывается.
Модуль памяти EPROM выполнен в большинстве случаев как отдельный конструктивный элемент. Управляющий модуль CPU обращается к модулю памяти EPROM через адресную шину и шину данных.
Модуль памяти Flash-EPROM (FEPROM)
Модуль памяти Flash-EPROM часто сокращенно именуется Flash. Информация в этот модуль может заноситься и стираться электрически. Таким образом, блок управления с модулями памяти Flash-EPROM может быть перепрограммирован на станции техобслуживания без вскрытия. При этом блок управления связывается с программатором через последовательный интерфейс.
Если микроконтроллер дополнительно снабжен ПЗУ, то там находится комплект программ для программирования Flash-памяти. Модули памяти Flash-EPROM могут быть вместе с микроконтроллером интегрированы в микрочип (начиная с модели EDC 16).
Модуль памяти Flash-EPROM из-за своих преимуществ заметно потеснил использование упрощенных модулей EPROM.
Модуль оперативной памяти или память переменных
Модуль оперативной памяти чтения/записи необходим для того, чтобы хранить изменяющиеся параметры (переменные), например, арифметические значения и значения сигналов.
Модуль памяти RAM
Запоминание всех текущих величин производит модуль памяти RAM (Random Access Memory, т.е. память чтения/записи). Для многозадачного использования емкости одного модуля памяти RAM, интегрированного в микроконтроллер, недостаточно, поэтому требуется дополнительный модуль памяти RAM, который подключается к микроконтроллеру через адресную шину и шину данных.
Если питание блока управления отключается выключателем стартера и свечей накаливания, то модуль памяти RAM теряет весь массив данных (это так называемая энергозависимая память).
Модуль памяти EEPROM (EPROM)
Модуль памяти RAM теряет свою информацию, если отключается от источника питания (например, при отключении питания выключателем стартера и свечей накаливания). Данные, которые не должны пропадать (например, коды блокировки движения и параметры неисправностей), должны долговременно храниться в модулях, не зависимых от энергопитания. Модуль памяти EEPROM загружается информацией электрически, но в нем, в противоположность модулю памяти Flash-EPROM, информация может стираться и заполняться по отдельности в каждой ячейке памяти. Кроме того, модуль памяти EEPROM предназначен для многократного повторения циклов записи/стирания информации. Таким образом, модуль памяти EEPROM применяется как энергонезависимое устройство чтения/записи.
Модуль ASIC
Совершенствование систем управления работой дизеля постоянно усложняет задачи блока управлении, поэтому возможностей стандартных микроконтроллеров оказывается недостаточно. В этом случае могут помочь модули ASIC (Application Specific Integrated Circuit, т.е. Адаптивные интегральные схемы). Эти интегральные схемы проектируются и изготавливаются по заданию разработчиков блоков управления. Они содержат, к примеру, дополнительный модуль памяти RAM, входные и выходные каналы, и могут самостоятельно генерировать и передавать сигналы ШИМ (см. разд. «Сигналы ШИМ»).
Модуль контроля
Блок управления располагает модулем контроля. Микроконтроллер и модуль контроля взаимно отслеживают действия друг друга путем постоянного обмена информацией в режиме «вопрос — ответ».
Если распознана ошибка, то оба устройства независимо друг от друга могут перейти на работу в аварийном режиме.
Выходные сигналы
Микроконтроллер с помощью выходных сигналов управляет выходными каскадами блока управления. Выходные каскады генерируют сигналы, мощность которых, как правило, достаточна для непосредственного управления исполнительными механизмами, а в отдельных случаях и реле. Каждый выходной каскад защищен от короткого замыкания и скачков напряжения, а также от разрушения вследствие электрической или тепловой перегрузки.
Любой нештатный режим интегральные схемы оконечных каскадов распознают как ошибку, и передают сигнал об этом в микроконтроллер.
Коммутационные сигналы
Коммутационные сигналы служат для включения и выключения исполнительных механизмов (например, электровентилятора системы охлаждения дизеля).
Сигналы ШИМ
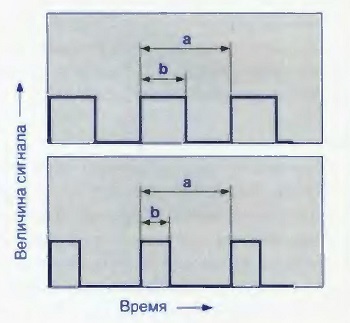
Рис. Сигналы ШИМ
Цифровые выходные сигналы могут генерироваться как сигналы ШИМ (широтно-импульсной модуляции). Эти сигналы представляют собой последовательность прямоугольных (на графике) импульсов с постоянной частотой и переменной длительностью (рис. «Сигналы ШИМ»). При помощи этих сигналов исполнительные механизмы могут приводиться в любое рабочее положение.
Передача данных в автомобиле
Периферийные системы, поддерживающие работу микроконтроллера, имеют возможность обмена с ним сигналами, что происходит через адресную шину и шину данных. Например, микроконтроллер выдает через адресную шину адрес модуля памяти RAM, по которому должно читаться содержание памяти.
На ранних стадиях развития автомобильной электроники обходились 8-битной шиной из восьми проводников, по которым можно передавать целые значения величиной до 256. С обычными для таких систем 16-битными адресными шинами можно обращаться к 65 536 адресам. Комплексные системы требуют в настоящее время 16 или даже 32 бит для шины данных. Чтобы сэкономить количество электрических выводов, шину данных и адресную шину можно мультиплексировать, т. е. адреса и данные можно передавать разнесенными по времени и использовать при этом одни и те же проводники.
Для данных, которые должны передаваться не так быстро (например, данные памяти неисправностей), применяют последовательные интерфейсы только с одной линией передачи данных.
Программирование EoL
Из-за множества моделей автомобилей, которым нужны различные программы управления и базы данных, требуется сокращение моделей блоков управления. К тому же полный комплект модулей памяти Flash-EPROM с необходимыми программами и набором данных для конкретной модели автомобиля может программироваться при завершении процесса изготовления транспортного средства с помощью так называемого программирования EoL (End-of-Line). Следующей возможностью является запоминание нескольких вариантов данных (например, вариантов коробки передач), конкретный нз которых выбирается затем кодировкой в конце конвейера сборки автомобиля. Эта кодировка вводится в модуль памяти EEPROM.
Требования к блоку управлении
Блок управления на автомобиле в принципе функционирует как персональный компьютер, т. е. в нем группируются данные и генерируются выходные сигналы.
Как у персонального компьютера, ядром блока управления является печатная плата с микропроцессором, изготовленная по прецизионной микроэлектронной технологии. Тем не менее, имеется несколько условий, которые блок управления должен выполнять дополнительно.
Режим реального времени
Системы двигателя и обеспечения безопасности движения требуют быстрого отклика регулирования, поэтому блок управления должен работать в режиме «реального времени». Это значит, реакция регулирования должна осуществляться одновременно с физическим процессом. Система реального времени должна иметь возможность гарантированно реагировать на требования в пределах определенного промежутка времени (своевременность). Это требует соответствующей комплектации компьютера и высокой его производительности.
Интегральная структура блока управления
Размеры и вес оборудования автомобиля всегда играли большую роль. Чтобы сделать блоки управления по возможности малогабаритными и легкими, применяют, кроме всего прочего, следующие технические решения.
- Многослойность: проводящие слои толщиной в диапазоне от 0.035 до 0,07 мм располагаются несколькими слоями друг над другом с соответствующей изоляцией.
- Конструктивные элементы SMD: эти очень мелкие поверхностные элементы (Surface Mounted Devices) припаиваются или приклеиваются непосредственно к печатной плате или на гибридную подложку, без установки в отверстиях.
- ASIC: Специально спроектированные интегральные модули могут объединять в себе множество функций.
Надежность эксплуатации блока управления
Необходимые избыточные (дополнительные, в большинстве случаев параллельно протекающие) вычислительные процессы и интегрированная диагностика дают большую надежность в отношении неисправностей.
Влияние окружающей среды на блок управления
- Температура: блоки управления на автомобиле при длительной эксплуатации должны выдерживать, в зависимости от области применения, температуры в диапазоне от -40°С до + 60…125вС. В некоторых местах печатной платы микроконтроллера температура из-за тепла, исходящего от электронных элементов. заметно выше. Особые требования предъявляют также изменения температуры режимов работы — от холодного пуска дизеля до термонапряженных режимов полной нагрузки.
- Электромагнитная совместимость: электроника транспортного средства очень строго проверяется на электромагнитную совместимость. Это значит, что электромагнитные источники помех (например, электромеханический исполнительный механизм) или излучатели (например, радиостанция, мобильный телефон) не должны мешать работе блока управления. Соответственно, блок управления при работе также не должен влиять на другую электронику.
- Вибростойкость: блоки управления, которые крепятся на двигателе, должны выдерживать ускорение до 30 g (т.е. 30-кратное ускорение силы тяжести); а блоки управления ТНВД — до 100 g.
- Стойкость к агрессивным средам: в зависимости от места крепления корпус блока управления должен противостоять влажности, агрессивным жидкостям (например, маслу) и солевому туману.
Экономичное выполнение этих и других условий, при растущем количестве требований, ставит перед разработчиками все новые задачи.