Коленчатый вал является одной из важных деталей двигателя. Он преобразует поступательное движение поршня во вращательное движение, которое в дальнейшем, через трансмиссию, передается к колесам.

Кинематика привода коленчатого вала
Кинематика привода коленчатого вала (для одного цилиндра) может быть определена из геометрического расположения осей поршня и поршневого пальца, шатуна и коленчатого вала (радиус коленчатого вала равен половине рабочего хода поршня) (см. рис. «Кривошипно-шатунный механизм поршневого двигателя» ).
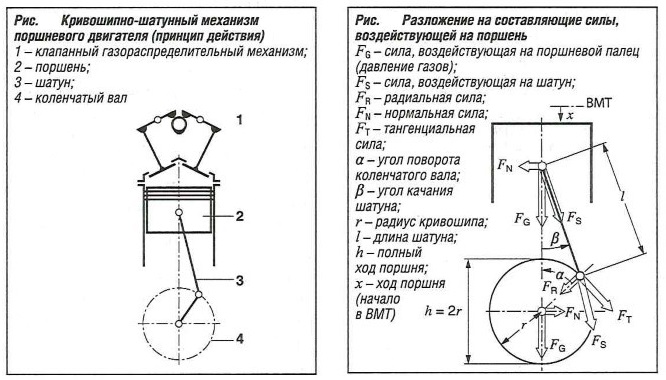
Если ход поршня х в верхней мертвой точке принять равным нулю, при радиусе кривошипа r и длине шатуна l получаем (см. рис. «Разложение на составляющие силы воздействующей на поршень» ):
х = r ( 1 — cosa) + l (1 — cosβ),
где:
r·sina = l·sinβ и λ = r/l.
Получаем следующее:
x = r (1 — cosa + 1/λ (1- √‾1-λ2·sin2a))
Некоторые производители применяют компоновку со смещенным поршневым пальцем. За счет изменения положения поршня и в зависимости от положения шатуна можно ожидать снижения трения и уровня шума. Смещение может осуществляться путем сдвига поршневого пальца относительно центрального положения или смещения коленчатого вала.
 Если принять смещение для положительных углов поворота коленчатого вала положительным и ввести величину
Если принять смещение для положительных углов поворота коленчатого вала положительным и ввести величину
δ = смещение / длина шатуна
это дает следующее соотношение для хода поршня:
x=r (1 — cosa + 1/λ (1- √‾1-(λ·sina-δ)2).
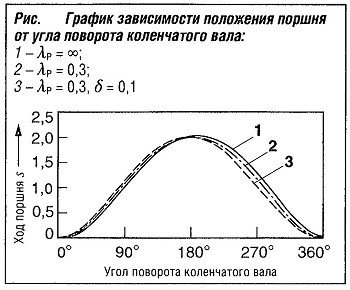
На рис. «График зависимости положения поршня от угла поворота коленчатого вала» показано влияние отношения хода поршня к длине шатуна и смещения. Однако различия по сравнению с нормальными значениями смещения в миллиметровом диапазоне (δ< 0,04), заметно меньше.
Преобразуя корневую функцию в ряд Тэйлора (при значениях хода около х = 0: в ряд Маклорена) и заменяя степени тригонометрических функций полигармоническими функциями, можно получить следующее выражение:
х = r(1+1/4·λ+3/64·λ3+…- cosa-(1/4λ+3/64·λ3+…)cos2a+(3/64·λ3+…)cos4a+…)
Это выражение демонстрирует присутствие высших гармоник, обусловленных кинематикой привода коленчатого вала, которые также называются колебаниями двигателя высшего порядка (кратные частоты вращения коленчатого вала).
Поскольку нормальные значения λ составляют около 0,3, членами λ высшего порядка можно пренебречь и в дальнейших расчетах использовать следующее упрощенное выражение:
х = r( 1 + 1/4λ — cosа — 1/4λ · cos2а) .
Однако это упрощение не может быть использовано, если необходимо выполнить детальный анализ вибрации и резонанса.
Из упрощенного уравнения получаются следующие соотношения для скорости поршня v и ускорения поршня а, где была введена угловая скорость da/dt=ω= 2πn (п частота вращения):
v = rω (sin а + λ/2 · sin2а)
а = rω2 (cosa + λ·cos2а).
Здесь также имеют место высшие гармоники, которые не следует игнорировать при исследовании явлений резонанса.
Динамика коленчатого вала
Силы, воздействующие на узел коленчатого вала, и результирующие моменты первоначально можно определить следующим образом без учета сил инерции (рис.»Разложение на составляющие силы воздействующей на поршень» ).
Сила на поршневом пальце возникает под действием давления газов в камере сгорания, передающегося на поршень. Имеет место следующее:
FG = (P -PKGH) Apiston
Сила на шатуне определяется посредством векторного анализа силы на поршневом пальце в направлении шатуна. Имеет место следующее:
FS = FG /cosβ=FG /√¯1-λ2·sin2a
Нормальная сила поршня FN — это векторная составляющая силы на поршневом пальце, перпендикулярная к стенке цилиндра и уравновешивающая силу на шатуне:
FN=FG·tanβ=FG·λ sina/√¯1-λ2·sin2a
Эта сила вносит значительный вклад в создание трения между поршнем и стенкой цилиндра. Сторона, с которой соприкасается поршень после верхней мертвой точки под действием давления газов, называется большой упорной поверхностью, а противоположная сторона — малой упорной поверхностью. Следовательно, наибольшее трение имеет место вскоре после прохождения ВМТ на большой упорной поверхности.
Тангенциальная сила на шатунной шейке коленчатого вала вызывает ускорение коленчатого вала и, следовательно, увеличение крутящего момента коленчатого вала. Она определяется путем векторного анализа силы на шатуне:
FT=FGsin(a+β) / cosβ= FG (sin a + λ/2·sin2а/√‾1 -λ2sin2a).
Подкоренное выражение может быть упрощено следующим образом:
FT≈ FG (sinа + λ/2· sin2а) .
Радиальная сила FR на шатунной шейке коленчатого вала:
FR =FG·cos(a+β)/cosβ
или приблизительно
FR≈ FG (cosa — λ/2+λ/2·cos2a) .
Силы инерции можно разделить на колебательные и вращательные составляющие. Массы поршня, поршневых колец и поршневого пальца mк относятся к колебательной составляющей и могут быть виртуально сосредоточены в поршневом пальце.
Щека коленчатого вала с шатунной шейкой относятся к вращательной составляющей. Здесь масса обычно сосредотачивается на радиусе кривошипа, на центральной оси шатунной шейки. Применимо следующее:
mw=Σ mlrsl/r
где ml — масса соответствующего компонента (щека, палец и т.д.), а rsl — соответствующий радиус центра массы.
В связи с колебательным движением шатуна целесообразно разделить массу шатуна на колебательную и вращательную составляющие. Это может быть сделано, если известно точное положение центра тяжести и момента инерции шатуна, предполагая наличие двух динамически идентичных отдельных масс малой и большой головок шатуна, и определяя Условие равновесия сил, моментов и инерционных масс. Обычно предполагается, что одна треть массы шатуна тpl является колебательной, а две трети — вращательной. Затем при т0 = mK + 1/3 тРl, как колебательной массы и соответствующем ускорении поршня (см. ниже) колебательная сила инерции выражается как:
F0≈m0·r·ω2 (cosa + λ·cos2a),
Таким образом, колебательная сила инерции возрастает пропорционально квадрату частоты вращения двигателя (ω = 2π·п) и имеет составляющую первого порядка и меньшую составляющую второго порядка.
Вращательная сила инерции выводится, как центробежная сила из уменьшенной массы mr = mw + 2/3 тРl и скорости вращения как:
Fr = mr·r·ω2
Точно так же вращательная сила инерции возрастает пропорционально квадрату частоты вращения двигателя, но не имеет составляющих высших порядков. Вращательная сила инерции, следовательно, может быть легко уравновешена противовесами, вращающимися со скоростью, равной частоте вращения двигателя. Неравномерности вращения коленчатого вала столь малы по сравнению с этими силами, что в балансе масс ими можно пренебречь.
Как было показано выше в кинематике узла коленчатого вала, высшие гармоники (колебания высшего порядка) возникают за счет геометрии кривошипно-шатунного механизма. Амплитуда колебаний 4-го и выше порядков быстро снижается, и в балансе масс этими колебаниями, как правило, пренебрегают.
Уравновешивание масс в одноцилиндровом двигателе
Компонент вращающейся массы в одноцилиндровом двигателе может быть полностью уравновешен при помощи соответствующего противовеса. Противовесы обычно предусматриваются на обеих сторонах, и массы должны быть сбалансированы относительно радиуса вращения центра масс. Колебания сил можно представить в виде векторов силы (рис. «Полностью уравновешенные массы 1-го и 2-го порядков» ), когда они моделируются как вращающиеся в противоположных направлениях, и имеющие в каждом случае половинную величину.
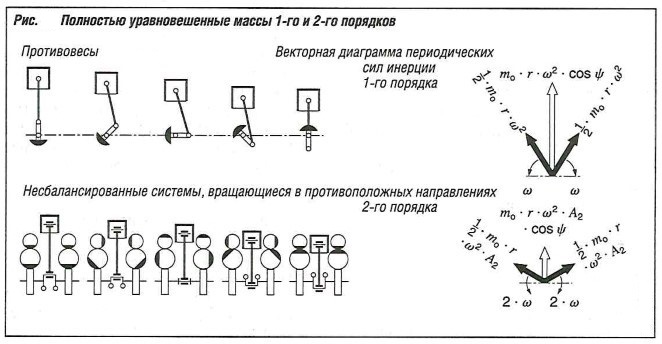
Следовательно, для уравновешивания колебательных сил инерции могут быть использованы два вращающихся в противоположном направлении вала. Горизонтальная составляющая исчезает и, как минимум составляющая колебательной силы инерции первого порядка может быть скомпенсирована.
Для практически полного уравновешивания масс требуются дополнительные уравновешивающие валы, которые должны вращаться со скоростью в два раза выше частоты вращения двигателя, чтобы полностью уравновесить составляющую колебаний второго порядка.
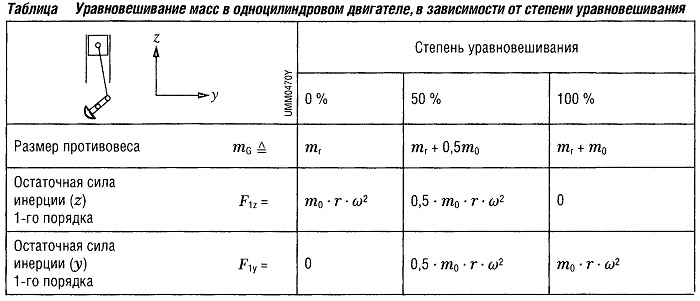
Часто конструкторам приходится идти на компромисс вследствие того, что системы с противоположно вращающимися валами являются дорогостоящими, и уже для уравновешивания сил инерции первого порядка требуются значительные массы. Например, масса противовеса может быть равна половине колеблющейся массы. При этом неуравновешенные силы инерции, действующие наружу в направлении продольной оси цилиндра, уменьшаются наполовину, однако за счет больших масс, вращающихся компонентов возникают поперечные силы (см. табл. «Уравновешивание масс в одноцилиндровом двигателе, в зависимости от степени уравновешивания» ). Такая частичная компенсация называется 50% — ной балансировкой. Обычными цифрами являются 100% уравновешивание вращающихся масс и 50% уравновешивание колеблющихся масс.
Уравновешивание масс в многоцилиндровых двигателях
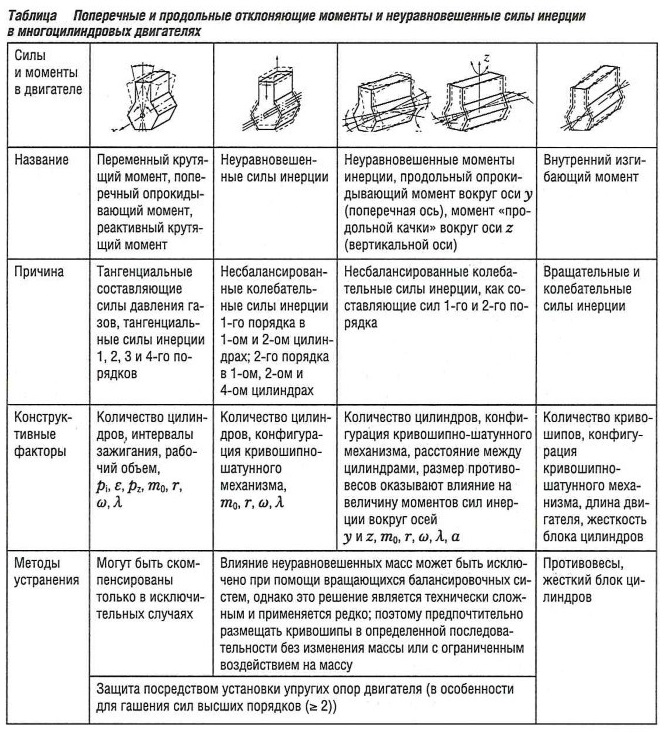
В многоцилиндровом двигателе силы инерции состоят из сил инерции каждого отдельного цилиндра, которые накладываются друг на друга. Кроме того, за счет промежутков между цилиндрами создаются неуравновешенные моменты инерции. Все возможные поперечные и продольные отклоняющие моменты, и неуравновешенные силы инерции показаны в табл. «Поперечные и продольные отклоняющие моменты и неуравновешенные силы инерции в многоцилиндровых двигателях» .
Взаимное уравновешивание сил инерции является одним из главных факторов, определяющих выбор конфигурации коленчатого вала, а, следовательно, и конструкции самого двигателя. В многоцилиндровых двигателях силы инерции могут быть уравновешены, если общий центр тяжести всех деталей кривошипно-шатунного механизма располагается в средней точке коленчатого вала, т.е., если коленчатый
вал является симметричным (глядя спереди). Это представлено полярными диаграммами сил 1-го и 2-го порядка (см. табл. «Полярная диаграмма сил для рядных двигателей» ).
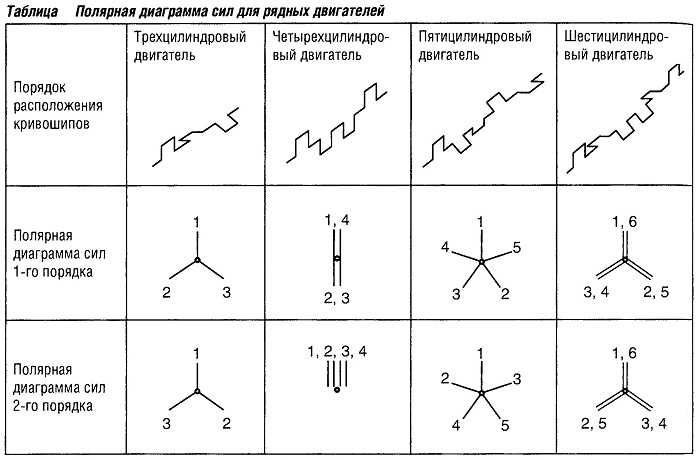
Диаграмма 2-го порядка для четырехцилиндрового рядного двигателя является асимметричной, указывая на то, что этот порядок характеризуется наличием больших неуравновешенных сил инерции. Эти силы могут быть уравновешены двумя балансирными валами, вращающимися в противоположных направлениях, но с удвоенной частотой (система Ланчестера).
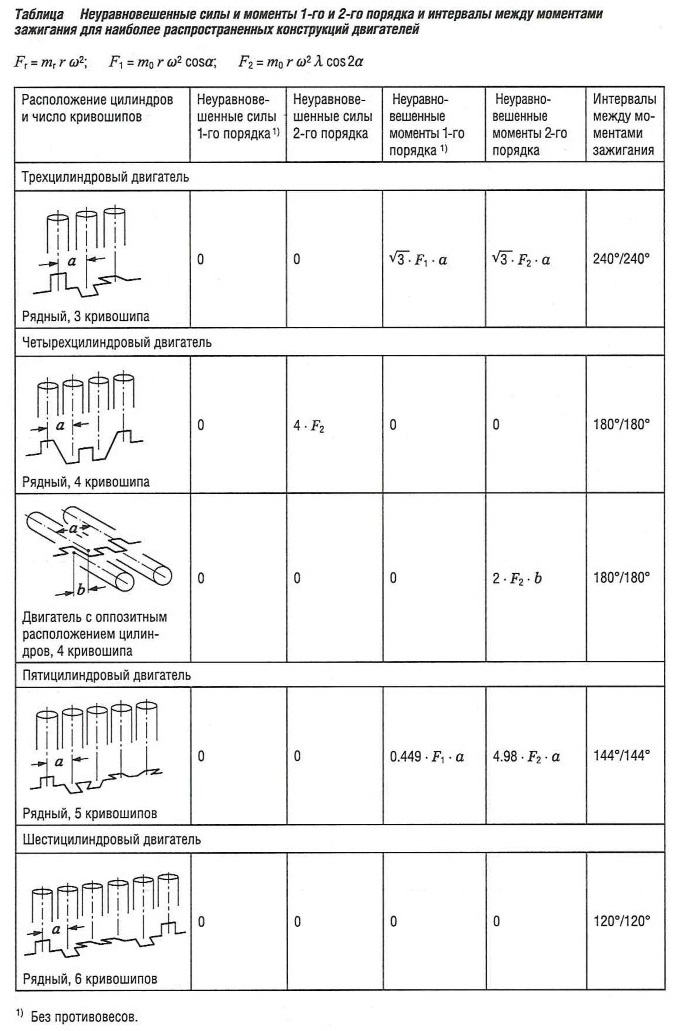
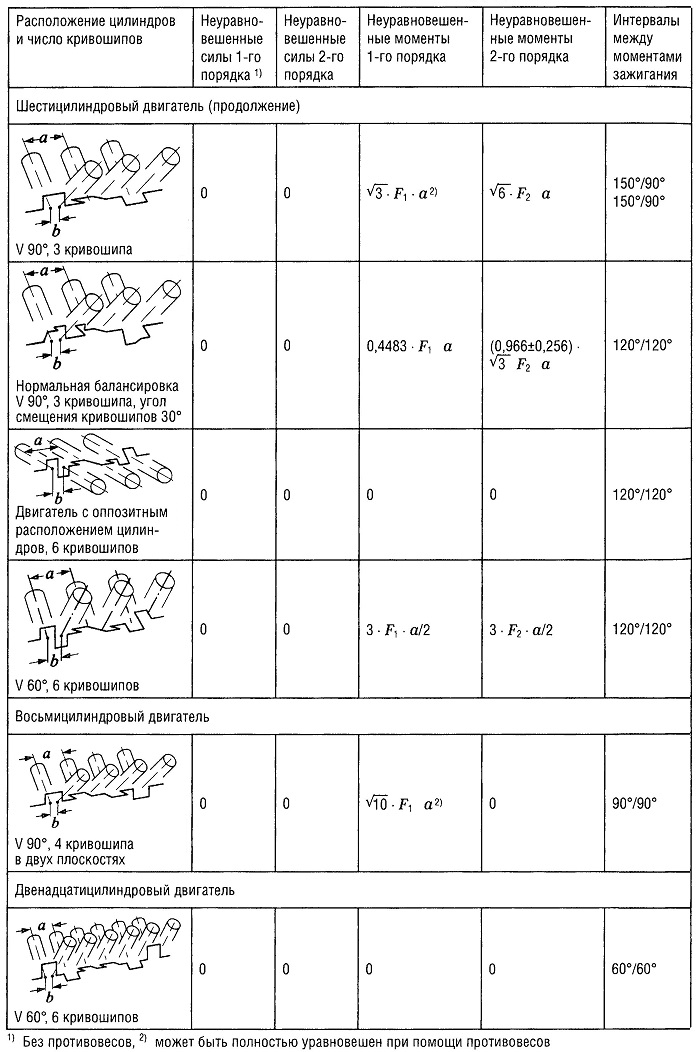
В табл. «Неуравновешенные силы и моменты 1-го и 2-го порядка и интервалы между моментами зажигания для наиболее распространенных моделей двигателей» приведена сводка неуравновешенных сил и моментов для различного числа цилиндров и конфигураций кривошипно-шатунных механизмов.
Крутящая сила
Массы в двигателе движутся с постоянно изменяющимся ускорением, что приводит к возникновению сил инерции. Циклически изменяющиеся давления в цилиндрах называются силами газообразных продуктов сгорания смеси. Те и другие силы по отношению к двигателю имеют как внутренние, так и внешние составляющие. Внутренние силы и моменты должны поглощаться компонентами двигателя, в особенности коленчатым валом и картером двигателя, в то время как внешние силы через опоры двигателя передаются на шасси автомобиля.
На поршень действуют циклические усилия, создаваемые при сгорании топливовоздушной смеси, а циклические инерционные усилия действуют на поршень, шатун и коленчатый вал. Все эти силы в сумме создают тангенциальную составляющую силы, действующую на шейку коленчатого вала. Эта сила, умноженная на радиус кривошипа, дает крутящий момент, также изменяющийся по периодическому закону.
В многоцилиндровых двигателях кривые тангенциального давления для отдельных цилиндров суммируют в соответствии с числом цилиндров двигателя, их расположением, конструкцией коленчатого вала и порядком работы цилиндров. Полученная результирующая кривая является характеристикой двигателя (с точки зрения его конструкции) и включает весь рабочий цикл (т.е., для четырехтактных двигателей два оборота коленчатого вала) (см. рис. «Полностью уравновешенные массы 1-го и 2-го порядков» ). Этот процесс можно проиллюстрировать диаграммой крутящих сил. Эта переменная крутящая сила и результирующий крутящий момент, в зависимости от момента инерции J, создают переменную скорость вращения ω:
dω/dt = M(t)/J
с учетом всех наложенных и вновь созданных порядков колебаний (в том числе половинных порядков). Это отклонение от постоянной скорости вращения называется коэффициентом циклического изменения скорости вращения и определяется следующим образом:
δs = (ωmax — ωmin) / ωmin
Этот коэффициент циклического изменения может быть уменьшен до приемлемого уровня при помощи механизмов, запасающих энергию, таких как, например, маховики. Крутильные колебания, которые можно отследить назад к описанным выше крутящим силам, также называются крутильными колебаниями 1-го порядка. Эти колебания нельзя смешивать с высокочастотными колебаниями, возникающими вследствие упругих деформаций и собственного резонанса коленчатого вала, называемыми колебаниями 2-го порядка.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: