
Электрические двигатели в автомобиле — это электрические машины (электромеханические преобразователи), в которых электрическая энергия преобразуется в механическую. В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Вот о том, что представляют собой электрические двигатели, мы и поговорим в этой статье.

Систематика роторных электрических машин
Электрические двигатели в автомобиле являются электро-магнето-механическими преобразователями энергии. При энергии Wm, имеющейся в магнитном поле, разряд, согласно углу вращения γ, создает магнитную силу Ft:
Ft = δ Wm / δ γ
Она служит тангенциальной силой для создания крутящего момента, вычисляемого по радиусу ротора r (рис. «Принцип работы роторных электрических машин» ). Это можно описать выражением:
М = Ft r.
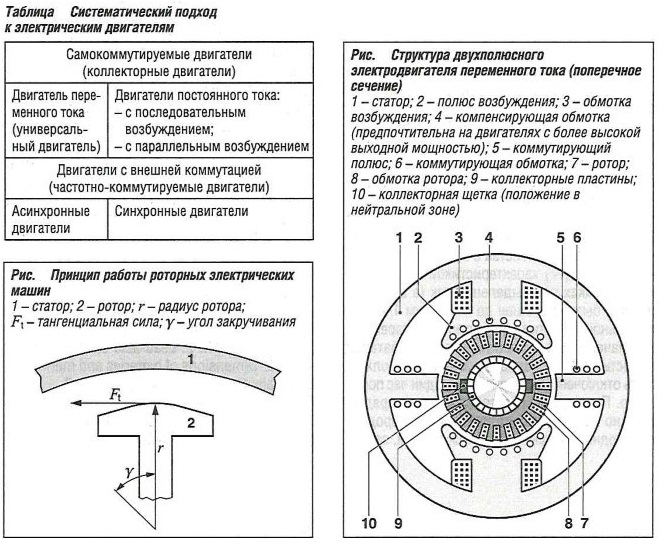
Электрические машины можно поделить на категории по их управлению (табл. «Систематический подход к электрическим двигателям»). Часть этой систематизации взята из стандарта DIN 42027.
Двигатели постоянного тока
Для работы в качестве двигателей часто выбираются двигатели постоянного тока. Они используются, например, в качестве приводов для электрических топливных насосов, вентиляторных электродвигателей, пусковых электродвигателей, электродвигателей стеклоочистителей ветрового стекла и стеклоподъемников.
Двигатель постоянного тока (рис. «Структура двухполюсного эектродвигателя переменного тока» ) состоит из статора с возбуждающей, компенсирующей и коллекторной обмотками, а также ротора (якоря) с роторной обмоткой. Ротор запитывается через коллекторные щетки и коллекторные пластины. Обмотки можно соединять параллельно или последовательно.
Двигатели постоянного тока классифицируются по различным характеристикам (с последовательным или параллельным возбуждением). Приведенные вычисления относятся к самокоммутирующимся двигателям. Схемы соединений двигателей постоянного тока регламентируются стандартом DIN EN 60034, часть 8.
Коммутация в двигателе постоянного тока
Для работы двигателя постоянного тока необходимо, чтобы направление тока в роторе оставалось постоянным относительно полюсов статора (рис. «Принцип коммутации тока» ). 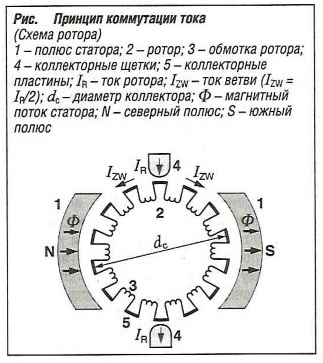 Процесс изменения направления тока в роторе происходит в нейтральной зоне и называется коммутацией. Коммутатор получает ток IR через коллекторные щетки. Он делится на токи ветвей Izw. Напряжение, наводимое в обмотках, вычисляется по формуле:
Процесс изменения направления тока в роторе происходит в нейтральной зоне и называется коммутацией. Коммутатор получает ток IR через коллекторные щетки. Он делится на токи ветвей Izw. Напряжение, наводимое в обмотках, вычисляется по формуле:
u = -L di / dt
Тангенциальная скорость vt поверхности коллектора:
vt = ω dc / 2
Для определения длительности цикла Тс учитывается количество коллекторных пластин:
Тс = πdc / vt K
Изменение тока в коллекторной обмотке происходит за время Тс. Если учесть, что имеет место лишь ток Izw, то для наведенного напряжения применяется следующее:
u = -L (Izw vt K / πdc)
Обозначения берутся из DIN 1304. часть 7.
Коммутирующая и компенсирующая обмотки
Распределение поля
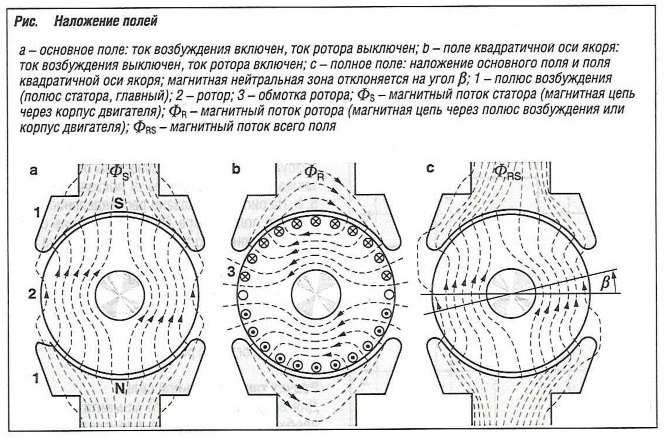
Главное поле, беспрепятственно проникающее в ротор при отсутствии тока, имеет симметричное распределение (рис. а, «Наложение полей» ). Аналогично, имеется симметричное разделение потока, когда ток подается только на ротор (рис. Ь, «Наложение полей» ).
При наложении этих полей нейтральная зона отклоняется на угол β (рис. с, «Наложение полей» ). Таким образом, эта магнитно-нейтральная зона больше не соответствует геометрически нейтральной зоне (положение коллекторных щеток).
В геометрически нейтральной зоне это создает магнитное поле, которое в процессе коммутации наводит напряжение в обмотке ротора, вызывая искрение между щеткой и движущейся коллекторной пластиной. Во избежание этого в процессе коммутации в этой обмотке наводится другое напряжение, где амплитуда и направление компенсируют эффект изначально наведенного напряжения. Это достигается с помощью коммутирующей обмотки (рис. «Структура двухполюсного электродвигателя переменного тока» ). Коммутирующая обмотка последовательно подключается к обмотке ротора. Она использует обратную реакцию ротора для противодействия смещению в магнитно-нейтральной зоне.
В случае с двигателями без коммутирующей обмотки щетки нужно смещать в магнитно-нейтральную зону. Возмущение основного поля, возникающее в области полюсного башмака, ведет к снижению доступной поверхности клеммы вкупе с ростом магнитного сопротивления. Вот почему у более крупных двигателей имеется компенсирующая обмотка, встроенная как полюсный башмак (рис. «Структура двухполюсного электродвигателя переменного тока» ). Компенсирующая обмотка последовательно соединяется с обмоткой ротора, и ее размеры таковы, чтобы компенсировать поперечное поле ротора.
Эффект коммутирующей и компенсирующей обмоток
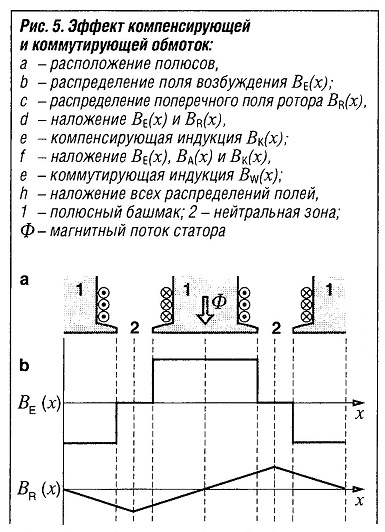
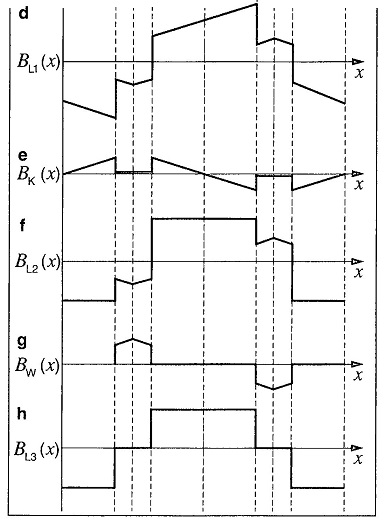
Последовательность изображений на рис. «Эффект компенсирующей и коммутирующей обмоток» описывает эффект обеих обмоток. Показаны распределения полей в воздушном зазоре. Расположение полюсов с обмоткой и нейтральной зоной показано на рис. а. Распределение поля возбуждения ВE(х) под полюсным башмаком, а также полюсное деление τР показаны на рис. Ь. На рис. с показано распределение поперечного поля ротора Br(x). Наложение обоих распределений полей можно увидеть на рис. d. Компенсирующая индукция Bk(x) (рис.5е) и наложение из рис. d показаны на рис. f. Если коммутирующая индукция Bw(x) на рис. g накладывается на распределение поля из рис. f, то получаем желаемое распределение поля согласно рис. h.
 |
 |
Расчет тангенциальной силы ротора
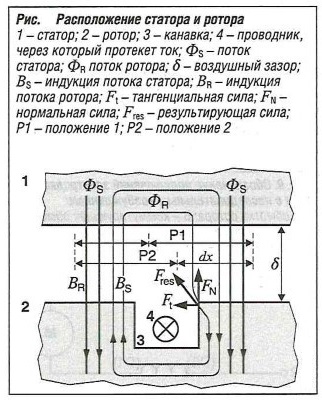 Для создания крутящего момента на роторе необходима тангенциальная сила. Объекты исследования — статор и ротор с канавкой (рис. «Расположение статора и ротора» ), в которой находится токоведущий проводник (прядь обмотки). Ротор перемещается из положения 1 в положение 2. Поток статора Фs создает индукцию Bs в воздушном зазоре, а проводник в роторе, через который протекает ток, вызывает индукцию ВR. С левой стороны канавки образуется деструктивное, а с правой стороны — конструктивное наложение этих двух индукций. Энергия, накопленная в воздушном зазоре с левой стороны канавки, равна:
Для создания крутящего момента на роторе необходима тангенциальная сила. Объекты исследования — статор и ротор с канавкой (рис. «Расположение статора и ротора» ), в которой находится токоведущий проводник (прядь обмотки). Ротор перемещается из положения 1 в положение 2. Поток статора Фs создает индукцию Bs в воздушном зазоре, а проводник в роторе, через который протекает ток, вызывает индукцию ВR. С левой стороны канавки образуется деструктивное, а с правой стороны — конструктивное наложение этих двух индукций. Энергия, накопленная в воздушном зазоре с левой стороны канавки, равна:
dW2 = (δIL/2μ0) (Bs2-BR2)dx (уравнение 1).
С правой стороны канавки она равна:
dW1 = (δIL/2μ0) (Bs2+BR2)dx (уравнение 2).
Работа dW, выполняемая в этой части, получается из разности между энергиями dW1 и dW2:
dW = dW1- dW2 = Ft dx (уравнение 3).
Уравнения 1, 2 и 3 можно использовать для вычисления силы Ft. Это можно описать выражением:
Ft dx = (lRδ/2μ0) [(Bs2-BR2)-(Bs2+ BR2)]dx.
Это значит, что:
Ft = (lRδ/2μ0) BR2
Магнитно-эффективная длина ротора равна lR. Сила Ft — это квадратичная функция индукции провода, по которому протекает ток. Влияния индукции статора компенсируют друг друга. Поскольку силы на пограничных слоях всегда воздействуют в направлении низкой проницаемости, то они влияют на крутящий момент из-за потоков, возникающих по бокам от канавки.
Электродвигатель параллельного возбуждения
Особенностью электродвигателя параллельного возбуждения является то, что обмотка ротора параллельно соединяется с обмоткой возбуждения. 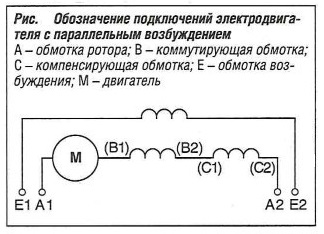 Для электродвигателя параллельного возбуждения действуют следующие условия подключения (рис. «Обозначение подключений электродвигателя с параллельным возбуждением» ):
Для электродвигателя параллельного возбуждения действуют следующие условия подключения (рис. «Обозначение подключений электродвигателя с параллельным возбуждением» ):
- А — обмотка ротора:
- А — коммутирующая обмотка;
- С — Компенсирующая обмотка;
- Е — обмотка возбуждения.
Расчет электродвигателя параллельного возбуждения базируется на сопротивлении ротора RA и напряжении, наводимом обмоткой ротора. Напряжение на клеммах UKl составляется из напряжения ротора UA = IА RA и наведенного напряжения Uind = c1 n ФS:
UKl = IА RA + c1 n ФS (уравнение 4).
Здесь с1 обозначает конструктивно определяемую константу двигателя, зависящую от количества катушек в обмотке ротора, n — частота вращения, ФS — поток статора, IА — ток ротора.
Решение уравнения 4 для n дает скорость вращения (уравнение частоты вращения — тока ротора):
n = (- RA /c1ФS) IА + UKl /c1ФS (уравнение 5).
Если момент двигателя Мм = с2ФS IАвставить в уравнение частоты вращения — тока ротора (уравнение 5), то получим уравнение частоты вращения — крутящего момента
n = (- RA /c1·с2·ФS2) Мм + UKl /c1·ФS (уравнение 6).
с2 — это тоже конструктивно определяемая константа двигателя, зависящая от количества катушек в обмотке ротора.
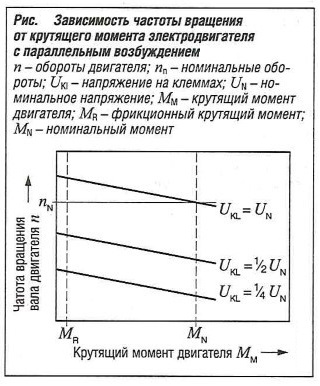 На рис. «Зависимость частоты вращения от крутящего момента электродвигателя с параллельным возбуждением» показаны рабочие характеристики электродвигателя параллельного возбуждения. Для преодоления трения двигатель должен развивать фрикционный момент MR. В момент включения частота вращения равна нулю. Это позволяет вычислить пусковой момент
На рис. «Зависимость частоты вращения от крутящего момента электродвигателя с параллельным возбуждением» показаны рабочие характеристики электродвигателя параллельного возбуждения. Для преодоления трения двигатель должен развивать фрикционный момент MR. В момент включения частота вращения равна нулю. Это позволяет вычислить пусковой момент
MA = UKl c2ФS /RA
в уравнении 6. При теоретически самой высокой частоте вращения на характеристической кривой (холостые обороты), двигатель не развивает крутящий момент. Холостые обороты n0 равны
n0 = UKl /c1ФS
Электродвигатель с последовательным возбуждением
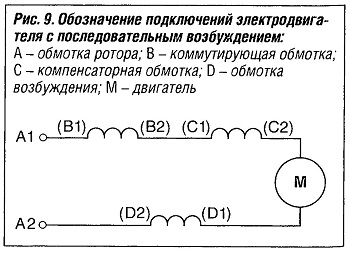 У электродвигателя с последовательным возбуждением коммутирующая, компенсирующая, возбуждающая обмотки статора и обмотка ротора соединяются последовательно (рис. «Обозначение подключений электродвигателя с последовательным возбуждением» ). D обозначает обмотку возбуждения электродвигателя с последовательным возбуждением. Чтобы определить рабочие характеристики, суммируем сопротивления обмоток, и получаем сопротивление RA.
У электродвигателя с последовательным возбуждением коммутирующая, компенсирующая, возбуждающая обмотки статора и обмотка ротора соединяются последовательно (рис. «Обозначение подключений электродвигателя с последовательным возбуждением» ). D обозначает обмотку возбуждения электродвигателя с последовательным возбуждением. Чтобы определить рабочие характеристики, суммируем сопротивления обмоток, и получаем сопротивление RA.
Точно таким же образом, как и в случае с электродвигателем параллельного возбуждения, напряжение на клеммах UKL складывается из напряжения ротора и наведенного напряжения:
UKl = IА RA + c1 n ФS (уравнение 7).
В результате получаем уравнение скорости вращения:
n = (- RA /c1Ф) IА + UKl /c1ФS (уравнение 8).
Магнитный поток можно вычислить с помощью другой константы двигателя с3:
Ф = с3 IА (уравнение 9).
 Константа двигателя с3 имеет единицу индуктивности и поэтому зависит от геометрии, количества катушек и проницаемости. Крутящий момент двигателя Мм вычисляется по формуле
Константа двигателя с3 имеет единицу индуктивности и поэтому зависит от геометрии, количества катушек и проницаемости. Крутящий момент двигателя Мм вычисляется по формуле
Мм = с2с3IА2 (уравнение 10).
Если уравнение 10 скорректировать согласно IА, это выражение будет действительно в уравнении 9 и оно, в свою очередь, в уравнении частоты вращения — тока (уравнение 8). В результате получаем:
n = (- RA/c1·с3) + (UKl √с2·с3/с1·с3) (1/√Мм ) (уравнение 11).
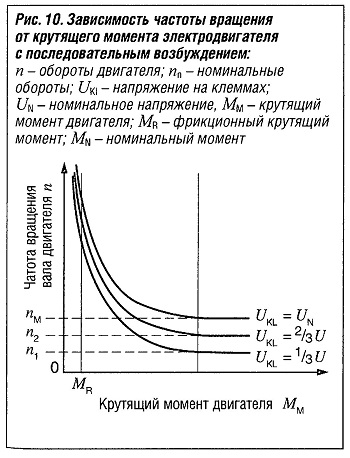
В отличие от электродвигателя с параллельным возбуждением, здесь частота вращения пропорциональна соответствующему значению корня крутящего момента (рис. «Зависимость частоты вращения от крутящего момента электродвигателя с последовательным возбуждением» ). Двигатель характеризуется значительным падением частоты вращения при малой нагрузке. Если внешняя нагрузка на двигатель будет равна нулю, то частота вращения теоретически будет стремиться к бесконечности.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: