
Современные принципы организации дорожного движения все больше внимания уделяют конструкции автомобиля с точки зрения безопасности. При этом необходимо учитывать маневренность автомобиля, его габариты и устойчивость при движении в различных дорожных условиях. Обгон автомобиля является сложным и опасным маневром, вызванным желанием водителя двигаться без потерь времени. 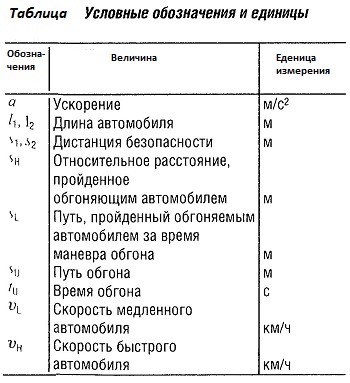 Трудность правильного выполнения обгона в сочетании с высокой скоростью требует от водителя безошибочного расчета и точных действий по управлению автомобилем. Вот о том, каким бывает обгон автомобиля, мы и поговорим в этой статье.
Трудность правильного выполнения обгона в сочетании с высокой скоростью требует от водителя безошибочного расчета и точных действий по управлению автомобилем. Вот о том, каким бывает обгон автомобиля, мы и поговорим в этой статье.
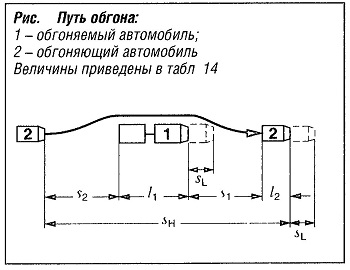
Весь маневр обгона включает в себя такие стадии, как выезд обгоняющего автомобиля с полосы своего движения, опережение другого автомобиля и возвращение снова на свою полосу движения (см. рис. «Путь обгона» ). Решение водителя о необходимости обгона принимается под действием ряда обстоятельств, точное определение которых затруднено. По этим причинам в приведенных графиках и иллюстрациях, а также уравнениях рассматриваются только два частных случая: обгон автомобиля при постоянной скорости движения и обгон при постоянном ускорении. Можно упростить графики, если представить путь обгона SU как сумму двух составляющих SH и SL, а также не учитывать дополнительный путь, который проходит обгоняющий автомобиль при выезде со своей полосы движения и въезде на нее снова.

Путь обгона автомобиля
 Путь обгона равен:
Путь обгона равен:
sU = sH + sL
(см. переменные, приведенные в табл. «Условные обозначения»).
Путь SH, который обгоняющий автомобиль должен пройти относительно обгоняемого (он считается неподвижным), можно выразить через сумму габаритной длины l1 и l2 обоих автомобилей и дистанций безопасности S1 и S2
SH = S1 + S2 + l1 + l2
В течение времени обгона tu обгоняемый автомобиль проходит расстояние SL — это расстояние, которое должен пройти обгоняющий автомобиль для обеспечения дистанции безопасности.
SL = tu vL/3,6
где v в км/ч.
Дистанция безопасности автомобиля
Минимальная дистанция безопасности соответствует расстоянию, проходимому в течение времени, предшествующего торможению tvz. Величина дистанции безопасности при времени, предшествующему торможению tvz = 1,08 с при скорости в км/ч составляет (0,3 v) метров. Однако, за пределами зон застройки рекомендуется принимать ее равной как минимум 0,5 v.
Обгон автомобиля с постоянной скоростью
На автомагистралях с более чем двумя полосами движения обгоняющий автомобиль может выполнять обгон автомобиля, не изменяя скорости движения. При этом время обгона (от момента изменения первоначальной полосы движения до момента возвращения на эту же полосу) будет равно:
tu = 3,6SH /vH —vL
где: t — в с, S — в м, а v — в км/ч.
Путь обгона:
Обгон автомобиля при постоянном ускорении
На узкой дороге скорость обычно снижается до скорости идущего впереди легкового или грузового автомобиля, а затем производится необходимый для обгона разгон. Величина ускорения зависит от мощности двигателя, массы автомобиля, скорости движения и сопротивления движению: значение ускорения обычно лежит в диапазоне 0,4 — 0,8 м/с2 и поднимается до 1,4 м/с2 при включении низших передач для повышения интенсивности разгона и соответствующего уменьшения времени обгона. Путь, необходимый для обгона, никогда не должен превышать половины видимого отрезка дороги.
Если допустить, что постоянное ускорение может поддерживаться в течение всего маневра, то время обгона будет равно:
tu = √¯2SH/α .
Расстояние, которое обгоняемый автомобиль проходит в течение этого периода, определяется как
SL = tuvl/3,6.
Тогда путь обгона:
SU = SH+ tuvl/3,6
где t — в с, S — в м, а v — в км/ч.
График определения пути обгона
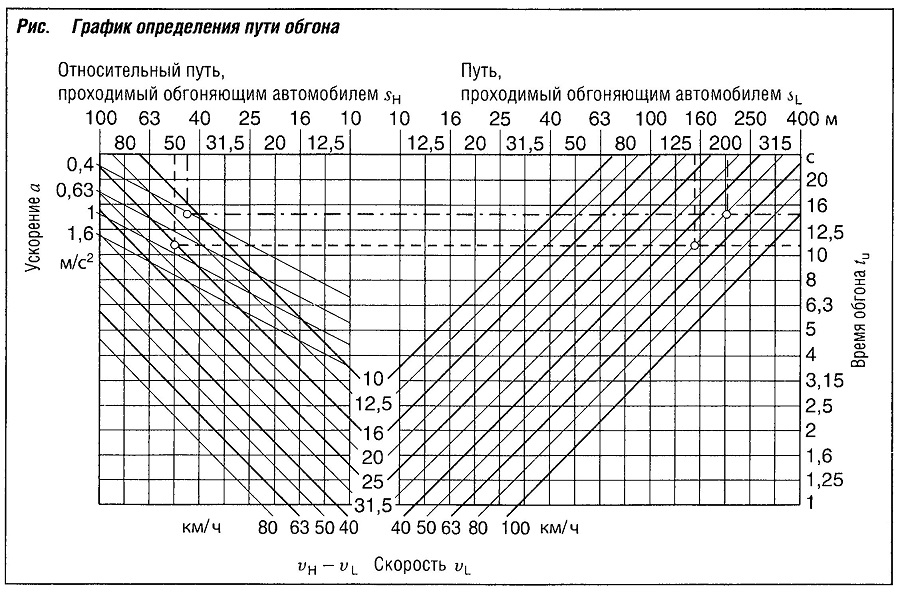
В левой части рис. «График определения пути обгона» показано относительное расстояние SH для разностей скоростей vH—vLи ускорений а. А в правой части — расстояния SL, проходимые обгоняемым автомобилем при различных скоростях vL. Путь обгона SU при этом равен сумме SH и SL.
Сначала определяется путь SH, который должен пройти обгоняющий автомобиль. Вводим это расстояние в левой части диаграммы между осью Y и соответствующей линией (vH—vL) или линией ускорения. Затем продолжаем эту линию вправо до линии скорости vL.
Пример (представлен штрихпунктирными линиями на графике определения пути обгона):
vL = vH = 50 км/ч,
а = 0,4 м/с2,
l1 = 10 м, l2 = 5 м,
S1 = S2 = 0.3 vL = 0,3 vH = 15 м
Решение:
находим точку пересечения: а = 0,4 м/с2 и
SH =15 + 15 + 10 + 5 = 45м
на левой стороне графика и определяем:
tu = 5 с, SL = 210 м,
отсюда SU = SH+SL = 255 м.
Визуальный диапазон видимости на дороге
Для безопасного выполнения обгона на узкой дороге расстояние видимости должно быть равно, как минимум, сумме пути обгона и расстояния, которое проходит встречный автомобиль за время выполнения маневра. Это расстояние равно примерно 400 м, если обгоняющий и встречный автомобили движутся со скоростями 90 км/ч, а обгоняемый автомобиль — со скоростью 60 км/ч.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: