Термин «мехатроника» появился в результате слияния механики и электроники, где электроника означает «аппаратную часть» и «программное обеспечение», а механика — общее понятие для дисциплин «машиностроение» и «гидравлика». Вопрос не в том, чтобы заменить инженерную механику «электронификацией», а в том, чтобы разработать синергетический подход и методологию проектирования. Вот о том, что представляет собой современная мехатроника, мы и поговорим в этой статье.

Цель мехатроники – это достижение синергетической оптимизации машиностроения, электронных устройств и программного обеспечения для проектирования еще большего количества функций при низких затратах, меньшей массе и меньшем занимаемом пространстве и при более высоком качестве.
Ключевым фактором успеха мехатронного подхода к решению проблем является рассмотрение двух прежде отдельных дисциплин как одного целого.
Применение мехатроиники в автомобилестроении
Мехатронные системы и компоненты теперь используются практически во всех аспектах автомобилестроения, начиная от управления двигателем и впрыска топлива в двигателях с искровым зажиганием, и дизельных двигателях управления переключением трансмиссии, и управления электрической и тепловой энергией до широкого спектра тормозных систем, и систем динамической стабилизации. Сюда даже относятся коммуникационные и информационные системы, со множеством разных требований. Наряду с системами и компонентами мехатроника играет все более важную роль в области микромеханики.
Примеры на уровне системы
Общей тенденцией является появление систем для полностью автоматического управления автомобилем. В будущем механические системы будут все больше заменяться системами «х-by-wire», т.е. электронными. Одной из систем, существующих уже довольно долгое время, является «drive-bywire», т.е. электронное управление дроссельной заслонкой. Система Brake-by-wire заменяет механическую и гидравлическую связь между педалью и тормозом колеса. Датчики определяют желание водителя затормозить и передают эту информацию на электронный блок управления (ЭБУ). Затем ЭБУ создает необходимое тормозное усилие на колесах посредством исполнительных механизмов.
Возможным вариантом реализации системы Brake-by-wire является электрогидравлическая тормозная система (SBC). При нажатии педали тормоза или вмешательстве системы динамической стабилизации (ESP) ЭБУ SBC вычисляет необходимое тормозное давление для каждого колеса. Поскольку электронный блок вычисляет необходимое тормозное давление отдельно для каждого колеса и по-отдельности определяет фактические значения, он может также регулировать тормозное давление на каждом колесе через модуляторы давления. Каждый из четырех модуляторов давления состоит из впускного и выпускного клапанов, управляемых электронными выходными каскадами, которые вместе обеспечивают точную регулировку давления.
В системе с общей напорной магистралью (дизельный двигатель) нагнетание давления и впрыск топлива отделены друг от друга. Аккумулятор высокого давления, т.е. общая напорная магистраль, накапливает давление топлива, необходимое для каждого рабочего режима двигателя. Форсунка, управляемая электромагнитным клапаном со встроенным соплом, выполняет функцию впрыска топлива прямо в камеру сгорания каждого цилиндра. Электроника двигателя постоянно запрашивает данные о положении педали газа, скорости вращения, рабочей температуре, расходе всасываемого воздуха и давлении в магистрали для оптимизации управления дозированием топлива в зависимости от режима работы.
Примеры на уровне компонентов
Топливные форсунки — важнейшие компоненты при определении будущего потенциала технологий для дизельных двигателей. Форсунки с общей топливной магистралью являются отличным примером того, что очень высокой степени функциональности и, в конечном итоге, удовлетворения клиентов можно добиться только путем контроля всех физических областей (электродинамики, механики, гидродинамики), воздействующих на эти компоненты.
Автомобильные CD-приводы подвергаются особенно жестким условиям эксплуатации. В дополнение к широким диапазонам температур, они должны выдерживать экстремальные вибрации, критически влияющие на такие высокоточные системы. Приводы обычно оснащаются системой упругой амортизации для изоляции блока воспроизведения от вибраций, возникающих при движении автомобиля. Любые стремления уменьшить вес и монтажное пространство CD-приводов сразу вызывают требования улучшения этих систем упругой амортизации. Если система амортизации CD-привода отсутствует, основной акцент делается на проектировании механической системы с нулевыми зазорами и обеспечении дополнительного усиления и отслеживающих контроллеров на высоких частотах. Лишь путем рассмотрения обеих мер с точки зрения мехатроники можно прийти к оптимальному решению по защите от вибрации в автомобиле. В дополнение к снижению массы примерно на 15 % необходимо также уменьшить монтажную высоту примерно на 20%.
Новый мехатронный подход для электроприводов вентиляторов радиатора системы охлаждения двигателя основан на использовании бесщеточных, электронно коммутируемых двигателей постоянного тока. Изначально, они более дороги (двигатель с электроникой), чем старые, оснащенные щетками. Однако общая оптимизация имеет положительный эффект: бесщеточные двигатели постоянного тока можно использовать в качестве двигателей с «мокрым» ротором с гораздо более простой конструкцией. Это уменьшает количество отдельных деталей примерно на 60%. Говоря в целом, более прочная конструкция имеет вдвое больший срок службы, почти вдвое меньший вес, примерно на 40% меньшую общую длину, в то же время поддерживая затраты на сравнимом уровне.
Примеры в области микромеханики
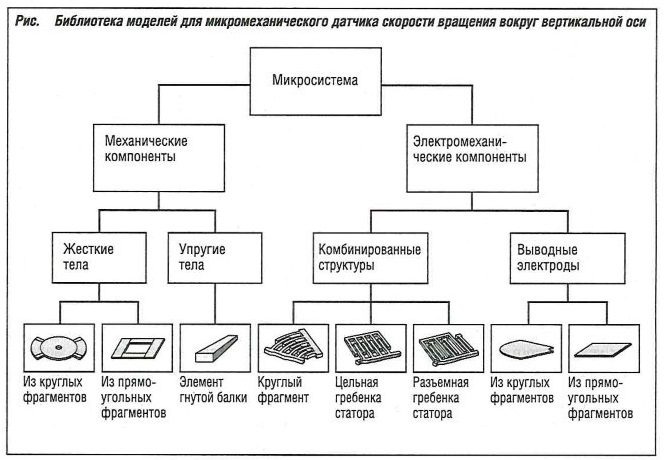
Еще одной областью применения для мехатроники являются микромеханические датчики, с достойными упоминания примерами, такими как пленочные термоананемометры и датчики скорости вращения вокруг вертикальной оси.
Конструкция микросистем также требует междисциплинарного подхода в связи с тесным взаимодействием между подсистемами, с отдельными дисциплинами, такими как механика, электростатика, гидродинамика (где необходимо) и электроника.
Методология разработки мехатронных систем
Моделирование мехатронных систем
Особые проблемы, с которыми проектировщики сталкиваются при разработке мехатронных систем, являются сокращение времени разработки и усложнение систем. В то же время крайне важно, чтобы в результате разработок создавались полезные продукты.
Сложные мехатронные системы состоят из большого количества компонентов из широкого спектра областей: гидравлики, механики и электроники. Взаимодействие между этими областями — решающий фактор, определяющий функционирование и эффективность всей системы. Модели требуются для проверки ключевых проектных решений, особенно на ранних стадиях разработки, когда еще нет прототипа.
Простейшие вопросы можно зачастую прояснить путем создания относительно простых моделей компонентов. Если требуется большая детализация, то нужны более подробные модели компонентов. Подробные модели фокусируются в основном на конкретной физической области.
В результате появились подробные гидравлические модели форсунок системы Common Rail. Они моделируются с помощью специальных программ, алгоритмы которых точно соответствуют гидравлическим системам. Например, здесь требованием могло бы быть принятие во внимание кавитации.
Подробные модели также требуются для проектирования силовой электроники для активации действия форсунок. Опять же, это подразумевает использование инструментов моделирования, которые должны разрабатываться для проектирования конкретных электрических цепей.
Инструменты, специально предназначенные для этой части системы, также должны обеспечивать разработку и моделирование программного обеспечения блоков управления ТНВД и силовой электроникой с помощью сигналов датчиков.
Поскольку компоненты системы взаимодействуют между собой, недостаточно рассматривать отдельные подробные модели компонентов изолированно. Оптимальное решение — учитывать модели других компонентов системы. В большинстве случаев эти компоненты могут быть представлены гораздо более простыми моделями. Например, для моделирования системы фокусированием на гидравлике, требуется простая модель силовой электроники.
Применение различных инструментов моделирования, адаптированных к конкретным областям при проектировании мехатронных систем, эффективно только при наличии поддержки по обмену моделями и параметрами между инструментами моделирования. Прямой обмен моделями очень проблематичен из-за того, что при описании моделей каждого из инструментов используются разные языки.
Однако анализ типичных компонентов в мехатронных системах показывает, что они могут состоять из нескольких простых элементов, адаптированных к конкретным областям. К этим стандартным элементам, например, относятся:
- В гидравлике: дроссель, клапан или трубопровод:
- В электронике: резистор, конденсатор или транзистор;
- В механике: масса тела с трением, трансмиссия или сцепление (соответственно, для микромеханики).
Предпочтительным решением является хранение этих элементов в центральной стандартной библиотеке моделей (рис. «Библиотека моделей для микромеханического датчика скорости вращения вокруг вертикальной оси» ), доступ к которой осуществляется также и децентрализованно. Ядром библиотеки моделей является документация всех стандартных элементов.
Для каждого элемента она содержит:
- Текстовое описание физического поведения;
- Физические уравнения, параметры (например, проводимость или проницаемость) и переменные состояния (например, ток, напряжение, магнитный поток, давление);
- Описание соответствующих интерфейсов.
V-модель
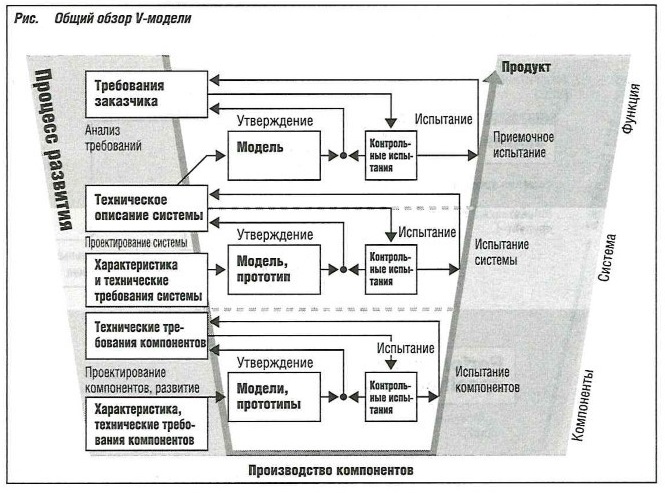
V-модель содержит взаимосвязи между различными этапами разработки продукта, от определения требований и реализации до испытаний и внедрения системы (рис. «Общий обзор V-модели» ). На стадии разработки проект проходит три уровня:
- Функции, учитывающие специфику заказчика;
- Система;
- Компоненты.
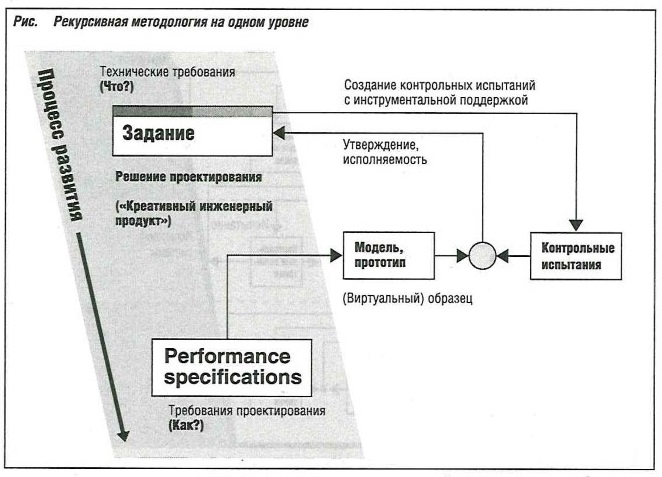
Сначала на каждом уровне нужно сформулировать требования («что?») в виде спецификаций (рис. «Рекурсивная методология на одном уровне» ). Затем они используются для создания проектных спецификаций на основании проектных решений. Характеристические спецификации описывают, «как» можно выполнить требование. Характеристические спецификации создают основу для описания модели, что позволяет проверять правильность каждого этапа проектирования вместе с определенными ранее контрольными примерами. Эта процедура проходит все три этапа и, в зависимости от применяемых технологий, в каждой соответствующей области (механика, гидравлика, гидродинамика, электрика и электроника, программное обеспечение).
Рекурсии на каждом уровне проектирования значительно сокращают стадии разработки. Моделирование, быстрое создание прототипов и одновременное проектирование — инструменты, позволяющие осуществлять оперативную проверку и создающие условия для сокращения циклов создания продукта.
Перспективы развития мехатроники
Движущей силой в мехатронике является постоянный прогресс. Прогрессу в мехатронике способствуют компьютерные технологии в виде все более мощных компьютеров в стандартных областях применения. Соответственно, имеется огромный потенциал дальнейшего роста уровней безопасности и комфорта автомобилей и дальнейшего уменьшения токсичности выхлопа и расхода топлива. Инженеры также сталкиваются с новыми проблемами при внедрении новых технологий для этих систем.
Даже в случае сбоя будущие системы «Х-Ьу-wire» должны быть способны продолжать выполнять предусмотренные функции без перехода на аварийный режим с включением механики или гидравлики. Условием их реализации является высоконадежная мехатронная архитектура, требующая «простой» проверки безопасности. Это влияет и на отдельные компоненты, и на передачу энергии и сигналов.
Наряду с системами «х-by-wire» еще одной областью, в которой можно достичь значительного прогресса путем систематического внедрения мехатронных систем, являются системы повышения безопасности при движении (DAS) и их человеко-машинные интерфейсы.
Подходы к проектированию мехатронных систем должны демонстрировать целостность в нескольких аспектах:
- Вертикальный: «нисходящий» анализ, начиная с моделирования системы с целью общей оптимизации до моделирования конечных элементов для детального понимания, и «восходящее» проектирование, начиная с испытаний компонентов и заканчивая испытанием всей системы;
- Горизонтальный: «одновременное проектирование» сразу в нескольких дисциплинах;
- Через корпоративные границы: постепенно внедряется концепция «виртуального образца».
Еще одной проблемой является обучение для стимулирования междисциплинарного подхода и разработки подходящих DE-процессов и форм организации и коммуникаций.