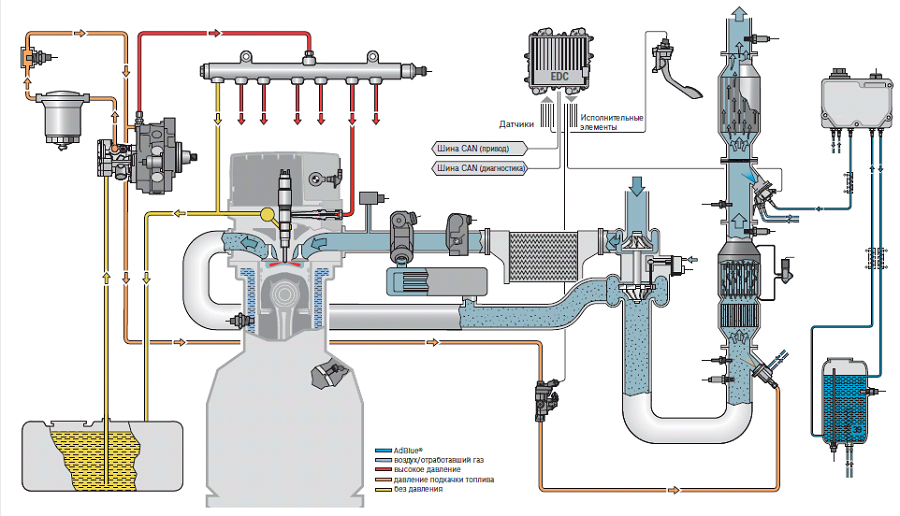
В системах впрыска топлива дизельных двигателей с электронным регулированием вместо механического регулятора применяется укрепленный на ТНВД исполнительный электромагнитный механизм. Он управляется электронным блоком (ECU), который получает сигналы от всех датчиков, расположенных на дизеле, и преобразует их в соответствии с программой и таблицами данных (например, полем характеристик). Так, характеристика регулятора моделей RQ или RQV может быть запрограммирована для определенных условий движения.
Полудифференциальный короткозамкнутый кольцевой датчик частоты вращения кулачкового вала ТНВД задает блоку управления требуемое положение рейки ТНВД, обеспечивая замкнутую цепь регулирования. Этот прибор называется также датчиком пути регулирования.
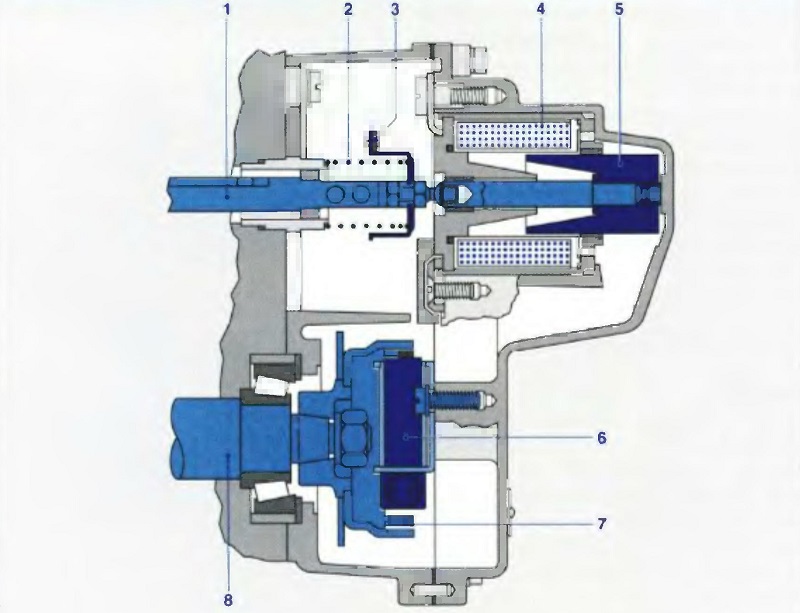
рис. «Исполнительный механизм системы электронного регулирования работы дизеля» 1. Рейна ТНВД; 2. Возвратная пружина; 3. Контактное кольцо датчика пути регулирования; 4. Электромагнит; 5. Якорь электромагнита; 6. Датчик частоты вращения; 7. Импульсное кольцо для датчика частоты вращения, или зуб для обозначения момента начала подачи; 8. Кулачковый вал ТНВД.
Конструкция и принцип действия электромагнитного управления
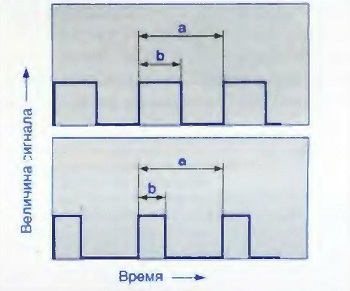
рис. «График сигнала широтной импульсной модуляции» а — постоянная часто та сигнала; b — переменное время включения
Величина цикловой подачи топлива определяется — как и в рядных ТНВД с механическим регулированием — положением рейки ТНВД и частотой вращения коленчатого вала.
Электромагнит 4 исполнительного механизма (рис. «Исполнительный механизм системы электронного регулирования работы дизеля») при подаче на него напряжения, перемещает якорь 5, преодолевая сопротивление возвратной пружины 2. С увеличением силы тока регулирования якорь сдвигает рейку 1 ТНВД в направлении большей цикловой подачи. Таким образом, происходит соответствующая установка рейки в любое необходимое положение — от нулевой до максимальной цикловой подачи. Когда электромагнит обесточен, возвратная пружина сдвигает рейку к положению «Стоп», и подача топлива прерывается.
Управление электромагнитом происходит не при помощи постоянного тока, а на основе изменения сигнала широтной импульсной модуляции (рис. «График сигнала широтной импульсной модуляции»).
На графике сигналы постоянной частоты с варьируемым временем включения имеют прямоугольную форму. Сила тока при подаче сигналов всегда постоянна. Эффективная же сила тока, которая влияет на работу якоря исполнительного механизма, зависит от соотношения продолжительности включенного и выключенного состояний электромагнита. Малое время включения создает меньшую эффективную силу тока, а большее время — большую. Частота сигналов также влияет на работу исполнительного механизма. Такой способ регулирования уменьшает возможные неполадки, особенно при малых токах.

рис. «Исполнительный механизм рядного ТНВД с регулированием начала подачи с помощью дополнительной втулки» 1. Исполнительный электромагнитный механизм; 2. Шаровое соединение; 3. Установочный валик регулирующей втулки; 4. Линейный электромагнит привода рейки ТНВД; 5. Рейка ТНВД; 6. Датчик хода рейки ТНВД; 7. Штекер электросоединения;
Исполнительный механизм при регулировании с помощью регулирующей втулки
Рядные ТНВД с регулирующей втулкой имеют, кроме рейки 5 (рис. «Исполнительный механизм рядного ТНВД с регулированием начала подачи с помощью дополнительной втулки»), установочный валик 3 для изменения момента начала впрыскивания (см. статью «Рядные ТНВД с регулирующей втулкой»). Этот валик поворачивается исполнительным электромагнитным механизмом 1 через шаровое соединение 2. Меньшая эффективная сила тока дает меньший ход регулирующей втулки, и, тем самым, обеспечивается более позднее начало подачи. Если сила тока увеличивается, момент начала подачи смещается в сторону раннего.