
Автомобильная навигация — это прежде всего, определение места автомобиля. Навигационная система, главным образом, опирается на систему GPS (система глобального позиционирования). Автомобильная навигация сравнивает вычисленную позицию с цифровой картой и использует эту карту для расчета маршрута к нужной точке.

Автомобильная навигация
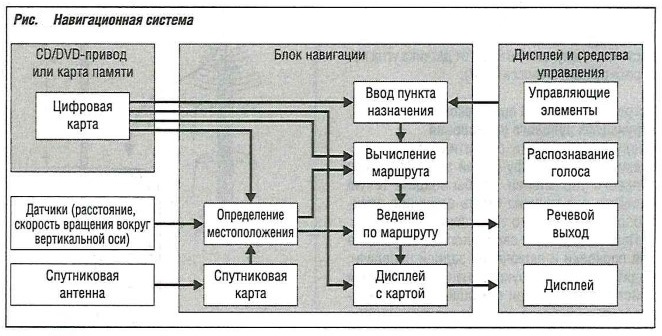
Навигационное оборудование может устанавливаться на транспортное средство на заводе-изготовителе (рис. «Навигационная система» ). Также широко используются мобильные навигационные системы. По сравнению с портативными системами постоянно установленные устройства обеспечивают лучшее качество позиционирования, и, значит, улучшенную навигацию, поскольку можно получать данные от дополнительных датчиков расстояния и направления (скорость и направление), и антенну можно установить в более благоприятном месте для приема спутникового сигнала. В качестве опции для стационарного оборудования широко используются сетевые возможности, т.е. возможна сетевая интеграция системы. Голосовые сообщения могут озвучиваться через динамики и заглушаться при разговоре по телефону. Информация по выбору маршрута может отображаться в комбинации приборов или на мониторе, или отражаться на ветровом стекле, и быть доступной в рамках основного поля зрения водителя.
Функции автомобильной навигации
Позиционирование
Система глобального позиционирования (GPS)
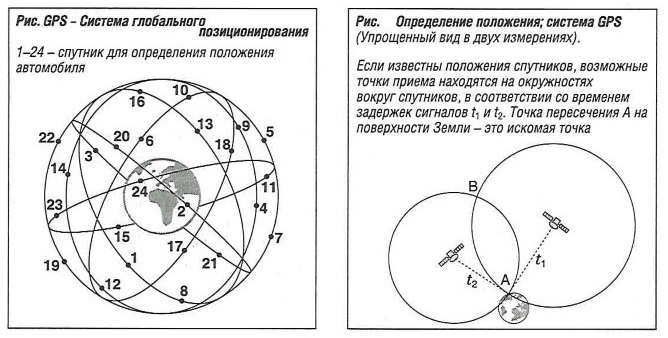
Система GPS основана на сети из 24 военных спутников США, которые используются для глобального позиционирования (рис. «GPS — система глобального позиционирования» ). Они летают вокруг Земли по шести различным орбитам на высоте приблизительно 20 000 км с интервалом в 12 часов. Они расположены таким образом, что с каждой точки на поверхности Земли видны, как минимум, четыре (обычно до восьми) спутников выше линии горизонта.
Эти спутники 50 раз в секунду передают специальные сигналы положения, идентификации и времени на несущей частоте 1,57542 ГГц. Каждый спутник имеет на борту двое цезиевых и двое рубидиевых атомных часов с отклонением менее 20-30 нс для высокоточного определения времени для сигналов.
Определение положения
Сигналы от спутников приходят на GPS — приемник автомобиля не одновременно из-за различия расстояний. Положение приемника рассчитывается методом радиогеодезических измерений. При получении сигналов, как минимум, от трех спутников, навигационное устройство рассчитывает свое географическое положение в двух измерениях (долгота и широта). Имеется только одна точка, соответствующая условиям дальности (времени прибытия сигналов). При получении сигналов, как минимум, от четырех спутников, может быть рассчитано положение приемника в трех измерениях (с учетом высоты над уровнем моря). На рис. «Определение положения системой GPS» показан этот процесс в упрощенной форме (только в двух измерениях).
Точность позиционирования в навигации
Достижимая точность зависит от положения спутников, сигнал от которых может быть принят, относительно автомобиля. Чем больше пространственный угол спутника относительно автомобиля, тем лучше условия определения положения. Достижимая точность в плане — приблизительно 3-5 м, а по высоте — приблизительно 10-20 м.
В зонах высотной застройки спутниковые сигналы могут быть приняты только, если спутники расположены, в значительной мере, на одной линии, т.е. в направлении улицы. Однако, в этом случае пространственный угол между направлениями на спутники очень мал, и определение положения неточное.
Ошибки в определении положения могут возникать в результате отражения спутниковых сигналов, например, от железобетонных стен зданий.
Определение направления движения
Направление движения можно легко определить по разнице частот принятых сигналов, вызванной эффектом Допплера. Когда автомобиль движется по направлению к спутнику, GPS-приемник получает сигнал увеличенной частоты. С обратной стороны спутника приходит сигнал уменьшенной частоты. Начиная со скорости приблизительно 30 км/ч, этот эффект достаточно заметен при определении направления.
Навигационное счисление
Навигационное счисление позволяет определять положение даже, если сигналы GPS не принимаются, например, в туннеле. При этом добавляются циклически записываемые элементы по дальности в виде вектора по величине и направлению. Сигнал от спидометра передается через шину CAN для измерения пройденного расстояния. Изменения направления движения считываются датчиком курса. Таким образом, рассчитывается направление движения, начиная с последнего абсолютного определения направления, по последним полученным сигналам GPS на основе эффекта Допплера.
Корреляционное определение по карте
Процедура, именуемая «корреляционное определение по карте», состоит в постоянном сравнении расчетного положения с маршрутом, проложенным на цифровой карте. Таким образом, точное положение автомобиля может быть показано на карте даже, если расчетное положение неточное (неточность может быть вызвана, например, отсутствием сигнала GPS и ошибками в навигационном счислении). Таким образом, рекомендации по выбору маршрута могут быть поданы в наиболее удобной форме. Кроме того, можно скомпенсировать ошибки датчиков и накапливаемые ошибки навигационного счисления.
Ввод пункта назначения
Пункт назначения можно задать, например, через кнопочную панель устройства навигации, прямо через сенсорный экран или при помощи голосовой команды.  Пользователь вводит все необходимые данные через меню или в ответ на запросы голосовой системы коммуникации.
Пользователь вводит все необходимые данные через меню или в ответ на запросы голосовой системы коммуникации.
Цифровая карта дорожной сети содержит справочник маршрутов, позволяющий вводить в систему адрес пункта назначения. Для этого нужно иметь список всех известных названий. В свою очередь, эти списки содержат также названия дорог и улиц. Чтобы задать адрес более точно, пользователь может указать конкретный перекресток или номер дома.
Пункт назначения можно быстро ввести из памяти, где хранятся прежние пункты назначения, которые можно вызвать снова (например, пункт назначения, записанный в категории «избранное»).
Аэропорты, вокзалы, заправки, многоэтажные парковки и т.д. записаны в тематических списках (POI, интересные места). При помощи этих списков можно, например, найти близлежащую заправку или многоэтажную парковку (рис. «Пример показа карты с указанием POI» ).
Во многих навигационных системах пункт назначения можно отметить на дисплее по карте (например, при помощи сенсорного экрана).
Расчет маршрута
Стандартный расчет маршрута
Начиная с текущей позиции, навигационное устройство рассчитывает маршрут к заданному пункту назначения. Способ расчета может выбираться в соответствии с предпочтениями пользователя. Можно задать различные опции, такие как, например, оптимизация маршрута:
- На основе времени поездки;
- На основе критерия экономичности времени и расстояния поездки;
- На основе заданного минимального расхода топлива;
- В обход шоссейных дорог, паромных переправ или платных дорог.
Рекомендации по выбору маршрута выдаются в течение нескольких секунд после введения пункта назначения. Рассчитывается также сценарий, если водитель отклоняется от рекомендованного маршрута. Новые рекомендации выдаются до того, как водитель доедет до следующего перекрестка.
Динамический выбор маршрута
 Многие радиостанции передают сообщения о дорожной ситуации не только в виде речевых сообщений, но и в форме кода. Для этой цели существует стандарт «ALERT-С» для канала транспортной информации (ТМС). Информация ТМС передается по системе радиоданных (RDS) в диапазоне FM.
Многие радиостанции передают сообщения о дорожной ситуации не только в виде речевых сообщений, но и в форме кода. Для этой цели существует стандарт «ALERT-С» для канала транспортной информации (ТМС). Информация ТМС передается по системе радиоданных (RDS) в диапазоне FM.
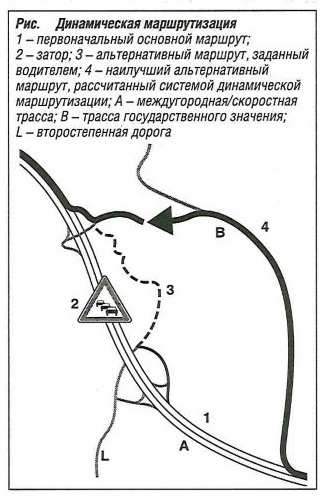
В кодированных сообщениях, кроме прочего, содержатся указания на места автомобильных пробок, их серьезность, фактическую длину и причины. Система навигации может получить такое кодированное сообщение и определить, не находится ли пробка на выбранном маршруте.
Если так, то маршрут рассчитывается заново, с поправкой на большее время прохождения участка с пробкой. Можно выбрать обходной маршрут (рис. «Динамическая маршрутизация» ). По новому маршруту будут новые рекомендации.
Кодированные сообщения системы ТМС передаются только для главных трасс.
Проведение по маршруту
Рекомендации по маршруту
Маршрутизация выполняется путем сравнения текущего местоположения автомобиля с вычисленным маршрутом. Рекомендации по маршруту обычно даются в звуковой (голосовой) форме. Это позволяет водителю не отвлекаться от дороги. Одновременно с этим в комбинации приборов — в главном поле зрения водителя — должны отображаться простые графики для оказания помощи в понимании направления движения. Эти графики могут быть в виде простых стрелок или в виде полноценной карты в нужном масштабе (рис. «Пример показа карты с указанием POI» ).
Цифровая карта
Дисплей карты
В зависимости от системы, карта на цветном дисплее может показываться в масштабе приблизительно 1:2 000 в 2D, перспективном 2D (псевдо 3D) или истинном 3D. В таком виде удобнее оценить весь маршрут или его участок. Дополнительная информация, такая как, например, реки или озера, железные дороги или леса, облегчает ориентирование.
Оцифровка
Карты и аэрокосмические фотографии высокого разрешения являются основой создания цифровых изображений. Если эти изображения устарели или недостаточно точны, проводятся полевые исследования. Оцифровка ведется вручную на основе картографического материала и аэрокосмических снимков. Затем в базы данных добавляются названия и классификация объектов (например, улицы, водные пространства, границы).
По улицам движутся специальные автомобили, записывающие характеристики, связанные с дорожным движением (например, односторонние дороги, ограничения проезда, мосты и туннели, запреты на поворот на перекрестках): затем данные оцифровки проверяются на месте. Данные, собранные таким способом, добавляются в базы данных и используются в цифровых картах.
Память данных
Диски DVD благодаря их большей в семь раз емкости, в настоящее время вытеснили диски CD в роли носителя цифровых карт. С другой стороны, новые системы теперь используют жесткие диски или SD-карты (последние явно преобладают для портативных систем). Эти средства записи информации предоставляют дополнительные возможности оптимизации навигационных систем в соответствии с предпочтениями пользователей.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: