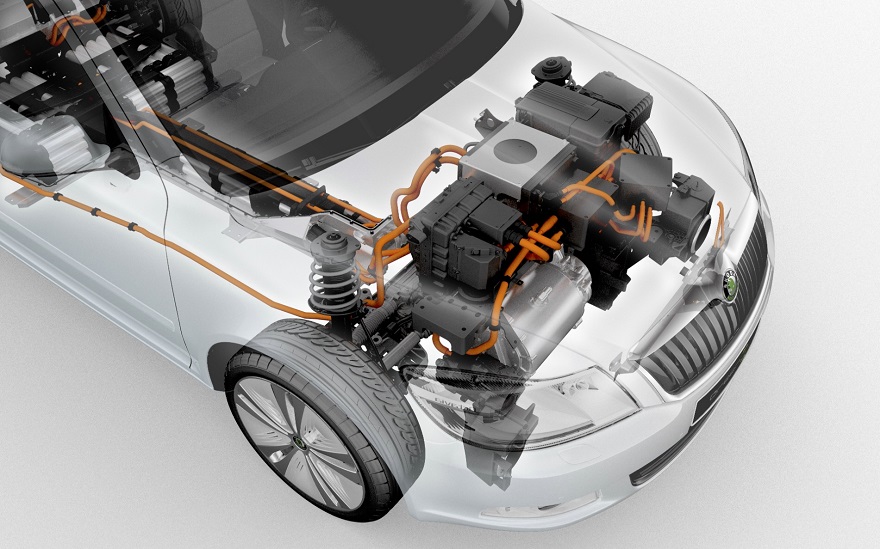
Электродвигатели, работающие на том же законе, что и электромеханический преобразователь Якоби, тем не менее существенно от него отличаются. Электродвигатели разных типов обладают отличительными свойствами, которые обуславливают их область применения, в которой они наиболее полезны. Электрические двигатели становятся мощнее и компактнее, к тому же, их КПД значительно вырос. Так коэффициент полезного действия современного тягового электродвигателя может составлять 85-95 % в то время как максимальный КПД двигателя внутреннего сгорания без вспомогательных систем едва дотягивает 45 %. Вот о том, какими бывают асинхронный и синхронный электродвигатели в автомобиле, мы и поговорим в этой статье.

Асинхронный электродвигатель
Асинхронный электродвигатель — основной привод, используемый в промышленности. К примеру, в автомобилестроении он используется в электроусилителях рулевого управления и в гибридных автомобилях. В следующем разделе представлена концепция работы асинхронного двигателя как индукционной машины. Приведен также энергетический анализ асинхронного двигателя в силу его явного преобладания среди приводов.
Устройство асинхронного электродвигателя
Различают двигатели с внешним ротором и внутренним ротором. У двигателей с внешним ротором статор находится внутри ротора, у двигателей с внутренним ротором наоборот — ротор находится внутри статора. На принципиальной схеме (рис. «Принцип работы асинхронного двигателя» ) показана принципиальная схема асинхронного двигателя с внутренним ротором.
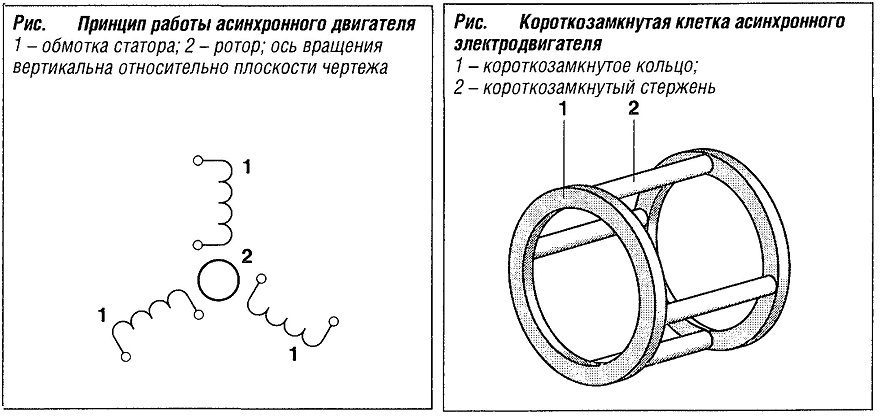
Ротор состоит из короткозамкнутого каркаса с пакетом пластин (рис. «Короткозамкнутая клетка асинхронного электродвигателя» ), в качестве примера с четырьмя короткозамкнутыми стержнями). Пакет пластин полностью заполняет пространство короткозамкнутого каркаса (на рис. не показано). Он состоит из отдельных стальных листов, изолированных друг от друга, чтобы свести к минимуму потери вихревых токов.
Рабочие характеристики асинхронного электродвигателя
Обмотка статора создает вращающееся поле с трехфазным переменным током. Между скоростью вращающегося поля и скоростью ротора возникает разница, создающая индукцию магнитно-эффективного тока в роторе, которая в свою очередь способствует созданию крутящего момента.
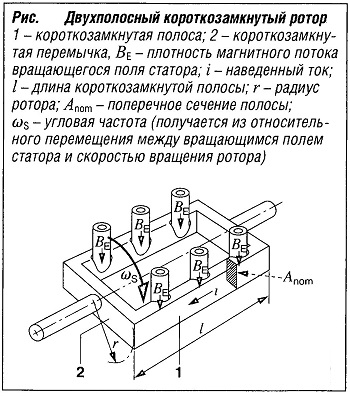 Физический принцип работы основан на законе магнитной индукции. На рис. «Двухполосный короткозамкнутый ротор» изображен ротор в виде упрощенного проводящего контура на вращающихся креплениях. Относительное перемещение между статором и ротором описывает угловая частота (os. Магнитное поле ВЕ с угловой частотой, окружающее контур ротора, наводит напряжение в короткозамкнутом роторе в соответствии со вторым уравнением Максвелла:
Физический принцип работы основан на законе магнитной индукции. На рис. «Двухполосный короткозамкнутый ротор» изображен ротор в виде упрощенного проводящего контура на вращающихся креплениях. Относительное перемещение между статором и ротором описывает угловая частота (os. Магнитное поле ВЕ с угловой частотой, окружающее контур ротора, наводит напряжение в короткозамкнутом роторе в соответствии со вторым уравнением Максвелла:
ΦEds = -d/dt∫∫BEdA (уравнение 12)
На основании этого уравнения и конструктивных переменных двигателя (см. рис. 13) получаем:
2E (l+2r) п = 2lr·ВЕ·ω sin(ωt) (уравнение 13)
где:
Е = I · Аnom /к (к — удельная электропроводность), напряжение создает магнитноэффективную мощность
i = (к·Аnomlr·ωs/(l+r))·sin(ωst) (уравнение 14)
в проводящем контуре, магнитное поле которого
Hind = i·N/lFe
и плотность потока (магнитная индукция)
Bind = μ·Hind
ослабляет исходное вращающееся поле ВЕ (индуктивное сопротивление). Нижеследующее уравнение применимо для получения результирующей магнитной индукции:
BR = BE-Bind
В уравнении Максвелла (уравнение 13) вместо ВЕ остается результирующая магнитная индукция BR. На проводящий контур воздействует тангенциальная сила Ft:
Ft = i l BR sin(ωst) (уравнение 15)
(сила Лоренца). Она используется для вычисления крутящего момента. Для уравнений 14 и 15 справедливо следующее:
M=2 Ft r = (2 k·Anom ωs/(l+r))·(lr·BR sin(ωst))2
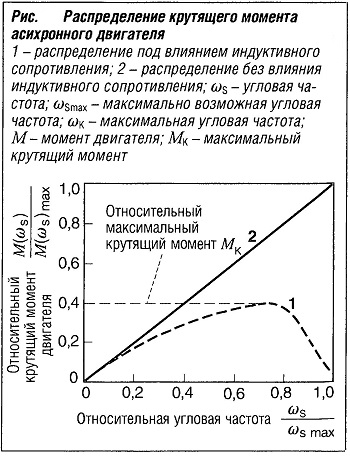 На рис. «Распределение крутящего момента асинхронного двигателя» показаны две характеристические кривые. Одна из них отображает крутящий момент под влиянием индуктивного сопротивления. На него может повлиять геометрия вала ротора и выбор материалов. Другая кривая отображает крутящий момент без влияния индуктивного сопротивления. Это ограниченный случай для технической реализации.
На рис. «Распределение крутящего момента асинхронного двигателя» показаны две характеристические кривые. Одна из них отображает крутящий момент под влиянием индуктивного сопротивления. На него может повлиять геометрия вала ротора и выбор материалов. Другая кривая отображает крутящий момент без влияния индуктивного сопротивления. Это ограниченный случай для технической реализации.
При увеличении угловой частоты индуктивное сопротивление сначала приводит к увеличению крутящего момента вплоть до достижения переломного момента. Это максимально возможный крутящий момент двигателя. Впоследствии он падает из-за увеличивающегося влияния индуктивного сопротивления. Рассеяние мощности Рv, возникающее в проводящем контуре, вычисляется на основе сопротивления проводящего контура Rs и тока, наведенного в контуре is:
Pv = Rs— is2
Таким образом, рассеяние мощности растет пропорционально квадрату наведенного тока.
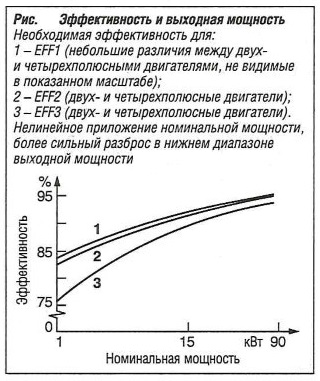
Классы эффективности двигателей
СЕМЕР Европейский Комитет изготовителей электродвигателей и силовой электроники) ввел классификацию эффективности на базе трех классов (EFF1, EFF2 и EFF3). Классы эффективности применяются к трехфазным асинхронным двигателям с двумя и четырьмя полюсами, а также с выходной мощностью от 1,1 до 90 кВт (рис. «Эффективность и выходная мощность» ).
 |
 |
Синхронный электродвигатель
Синхронные электродвигатели используются, в основном, в качестве генераторов переменного тока с клювообразными полюсами. В качестве электродвигателей они используются, например, в электроусилителях руля, в электроприводах гибридных автомобилей и в электроприводах турбонагнетателей.
Устройство синхронного электродвигателя
В отличие от асинхронного двигателя, в синхронном ротор вращается синхронно с полем возбуждения с угловой скоростью ωΦS. Магнитный поток ФR, создаваемый обмоткой ротора, и магнитный поток статора ФS накладываются друг на друга относительно результирующего магнитного потока ФRS (рис. «Базовая конструкция синхронного двигателя» ):
ФRS = ФR + ФS
Поскольку ротор и статор работают намного ниже уровня магнитного насыщения (μr—> ∞), воздушный зазор δ между ротором и статором, а также угол а определяют сопротивление магнитной цепи Rm.
Rm = 2δ/μ0 Ar = 2d/μ0 Ar cosa (уравнение 16).
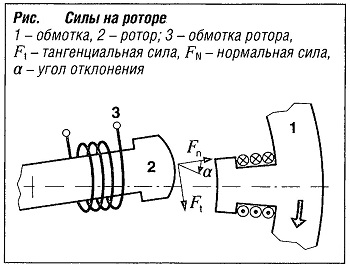 Коэффициент 2 используется потому, что между ротором и статором имеются два зазора. Если электродвигатель выдает крутящий момент, то ротор вращается с углом а из положения холостого хода (рис. «Силы на роторе» ).
Коэффициент 2 используется потому, что между ротором и статором имеются два зазора. Если электродвигатель выдает крутящий момент, то ротор вращается с углом а из положения холостого хода (рис. «Силы на роторе» ).
Результирующий магнитный поток ФRS рассчитывается по формуле:
ФRS = Θer/Rm + ФS
При Rm из уравнения 16 имеем:
ФRS = (Θer μ0 Ar cosa + 2d·ФS) /2d
При Θer = NIer получаем:
ФRS = N Ier μ0 Ar cosa+2d ФS /2d (Уравнение 17).
Θer — это магнитное «захлебывание» ротора, а Iеr — ток возбуждения, подаваемый на ротор через контактные кольца. Влияющая на крутящий момент тангенциальная сила Ft вычисляется по формуле полюсной силы Максвелла:
Ft = (ФRS2/μ0 Ar) sin а (уравнение 18)
Тангенциальная сила используется для вычисления крутящего момента двигателя МM:
MM = 2Ft r (уравнение 19).
Уравнение 17 вставляется в уравнение 18 и результат в уравнении 19 дает следующую зависимость:
Мм=-(r sin а/μ0 Ar d2)·[(N Ier μ0 Ar cosa)2+4 N Ier μ0 Ar d ФS cosa + 4 d2 ФS2]
 Первый член зависит только от тока возбуждения Ier и соответствует моменту от зубцовых гармонических помех поля. Второй член создает момент двигателя в решающей степени. Здесь можно увидеть линейную зависимость «захлебывания» ротора Θ = IerN и магнитного потока статора Фs. Третий член также создает крутящий момент и зависит лишь от магнитного потока статора.
Первый член зависит только от тока возбуждения Ier и соответствует моменту от зубцовых гармонических помех поля. Второй член создает момент двигателя в решающей степени. Здесь можно увидеть линейную зависимость «захлебывания» ротора Θ = IerN и магнитного потока статора Фs. Третий член также создает крутящий момент и зависит лишь от магнитного потока статора.
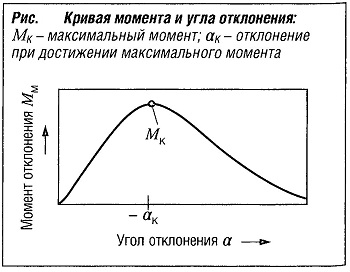
Рост внешнего нагружающего момента приводит к увеличению угла нагрузки а и, стало быть, к изменению момента двигателя Мм (рис. «Кривая момента и угла отклонения» ). Максимальный создаваемый двигателем момент обозначается как Мк в положении ак. При превышении ак электродвигатель «буксует».
Рабочие характеристики синхронного электродвигателя
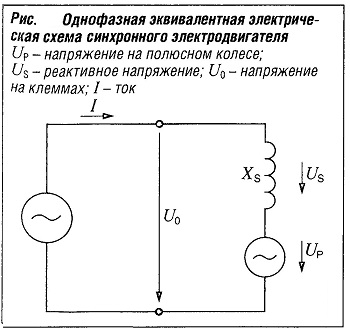 Схема синхронного двигателя может быть выполнена в виде однофазной эквивалентной электрической схемы, где источником напряжения считается напряжение, индуцируемое ротором в статоре (напряжение на полюсном колесе Up, а остаточные индуктивные сопротивления складываются, образуя синхронное сопротивление ХS (рис. «Однофазная эквивалентная электрическая схема синхронного электродвигателя» ). Напряжение сверх синхронного сопротивления обозначается как Us, а напряжение на клеммах — U0. Направление тока указывается в соответствии с системой стрелок для устройств-потребителей. В то время как при работе двигателя ток течет к потребителям, при работе генератора он течет от генератора. Составив сеточное уравнение, получаем ток I
Схема синхронного двигателя может быть выполнена в виде однофазной эквивалентной электрической схемы, где источником напряжения считается напряжение, индуцируемое ротором в статоре (напряжение на полюсном колесе Up, а остаточные индуктивные сопротивления складываются, образуя синхронное сопротивление ХS (рис. «Однофазная эквивалентная электрическая схема синхронного электродвигателя» ). Напряжение сверх синхронного сопротивления обозначается как Us, а напряжение на клеммах — U0. Направление тока указывается в соответствии с системой стрелок для устройств-потребителей. В то время как при работе двигателя ток течет к потребителям, при работе генератора он течет от генератора. Составив сеточное уравнение, получаем ток I
I = U0 — Up / ХS (уравнение 20).
На напряжение на полюсном колесе влияет ток возбуждения. Формулы выводятся ниже. Имеем:
Up = d ФR / dt
При косинусоидальном магнитном потоке ФR и
ФR = B AS
включая его временное дифференцирование, получаем:
Up =ФR ωФS sin(ωФS t)
=BR AS ωФS sin(ωФS t)
=μ HR AS ωФS sin(ωФS t)
Интенсивность создаваемого в роторе магнитного поля описывается законом Ампера. Напряжение на полюсном колесе:
UP = μ(ΘR/2δ) AS ωФS sin(ωФS t)
=Ier(μ N/2δ)AS ωФS sin(ωФS t)
= up sin(ωФS t)
в этом случае будет линейно зависимым от тока возбуждения Ier . Временно изменяемое напряжение на полюсном колесе преобразуется в эффективное по формуле:
UP = up/√2
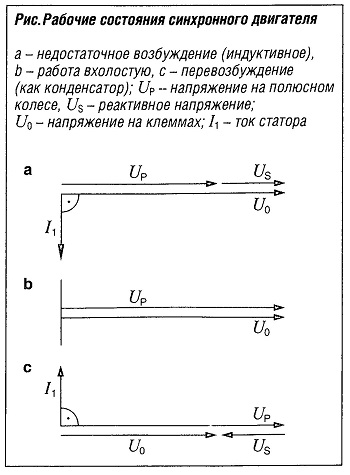 На базе сеточного уравнения (уравнение 20) можно вывести три рабочих со ия синхронного двигателя в зависимости от напряжения на полюсном колесе (рис. «Рабочее состояние синхронного двигателя» ):
На базе сеточного уравнения (уравнение 20) можно вывести три рабочих со ия синхронного двигателя в зависимости от напряжения на полюсном колесе (рис. «Рабочее состояние синхронного двигателя» ):
случай 1: UР< U0, недостаточное возбуждение, индуктивное поведение;
случай 2: Up = U0, работа вхолостую;
случай 3: Up > U0, избыточное возбуждение, как конденсатор.
Первый случай имеет место, пока UP<U0. Если Iеr = 0, то в качестве наведенного напряжения принимается лишь самонаводящееся напряжение. Если на ротор подается ток, то действует вызываемая ротором взаимная индукция. Первый случай называется недостаточным возбуждением. Ток отстает от напряжения на 90° (φ(I,U)< 0). Синхронный двигатель демонстрирует индуктивные характеристики.
Дальнейшее повышение тока возбуждения приводит к Up = U0. В результате получаем второй случай (работа вхолостую). Ток I1 становится равен нулю, если через синхронное сопротивление больше не подается напряжение.
Дальнейшее повышение тока возбуждения при UP> U0 приводит к третьему случаю (избыточное возбуждение).
Все три случая относятся к работе двигателя и генератора. Для однофазной эквивалентной электрической схемы напряжение и ток обозначаются стрелками. Кроме того, определяется нагрузочный угол β между напряжениями U0 и Us. Для работы двигателя нагрузочный угол β < 0 (рис. а, «Рабочие характеристики синхронного двигателя, работающего в режиме двигателя» ). Треугольник напряжений замыкается напряжением Us.
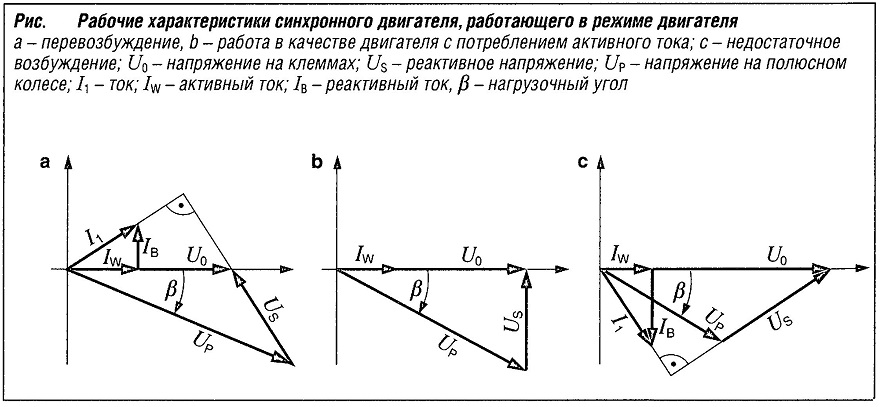
Синхронное сопротивление означает, что протекает ток I1 (опережающий на 90° напряжение Us. Он разбивается на следующие компоненты: активный ток IW и реактивный ток Iв (рис. а, «Рабочие характеристики синхронного двигателя, работающего в режиме двигателя» ).
Если напряжение на полюсном колесе уменьшить так, чтобы стрелка реактивного напряжения Us находилась вертикально на стрелке напряжения на клеммах, то двигатель будет лишь потреблять активный ток (рис. Ь,»Рабочие характеристики синхронного двигателя, работающего в режиме двигателя» ).
Дальнейшее снижение напряжения на полюсном колесе приводит к недостаточному возбуждению. Ток I1 отстает от напряжения Us на 90°, что равноценно индуктивным характеристикам двигателя (рис. с, «Рабочие характеристики синхронного двигателя, работающего в режиме двигателя» ).
При приложении к двигателю крутящего момента, он переходит в режим генератора. Работа в режиме генератора отличается положительным нагрузочным углом β (рис. «Рабочие характеристики синхронного двигателя в режиме генератора» ). Знак тока становится отрицательным. Ток опекает от электродвигателя. В случае перевозбуждения электродвигатель ведет себя как конденсатор. Он выдает реактивную мощность (рис. а,»Рабочие характеристики синхронного двигателя в режиме генератора» ).
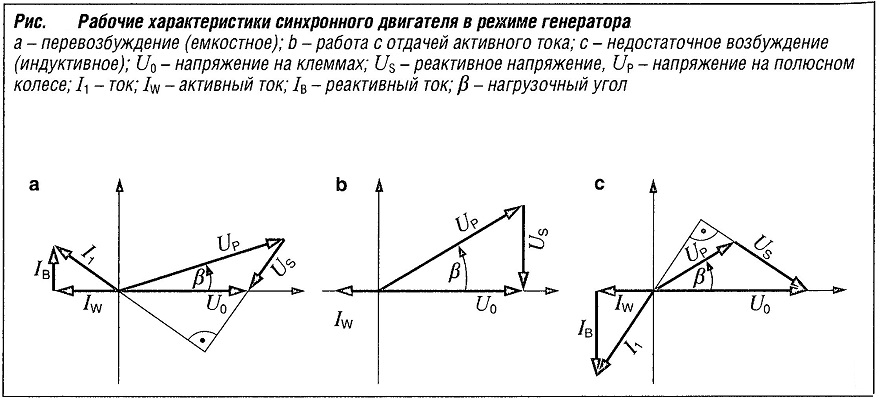
Если напряжение на полюсном колесе уменьшить так, чтобы стрелка реактивного напряжения Us находилась вертикально на стрелке напряжения на клеммах, то двигатель будет лишь выдавать активный ток (рис. Ь, «Рабочие характеристики синхронного двигателя в режиме генератора» ).
Дальнейшее снижение напряжения на полюсном колесе приводит к недостаточному возбуждению. Электродвигатель ведет себя индуктивно. Он потребляет реактивную мощность (рис. с, «Рабочие характеристики синхронного двигателя в режиме генератора» ).
Электронно-коммутируемые двигатели
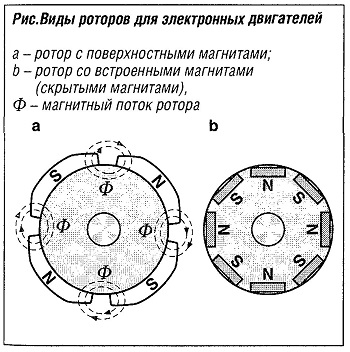 В случае с электронно-коммутируемыми двигателями (электронные двигатели), возбуждающая обмотка ротора, в том числе электрический контакт с токоприемными кольцами, не требуются. Электронно-коммутируемые двигатели представляют собой бесщеточные синхронные двигатели, где роторы снабжаются постоянными магнитами. Постоянные магниты могут располагаться, к примеру, на поверхности ротора или внутри него (рис. «Виды роторов для электронных двигателей» ). Коммутация тока происходит в фиксированной обмотке статора с помощью электронного блока (рис. «Активационная электроника электронно-коммутируемого двигателя» ).
В случае с электронно-коммутируемыми двигателями (электронные двигатели), возбуждающая обмотка ротора, в том числе электрический контакт с токоприемными кольцами, не требуются. Электронно-коммутируемые двигатели представляют собой бесщеточные синхронные двигатели, где роторы снабжаются постоянными магнитами. Постоянные магниты могут располагаться, к примеру, на поверхности ротора или внутри него (рис. «Виды роторов для электронных двигателей» ). Коммутация тока происходит в фиксированной обмотке статора с помощью электронного блока (рис. «Активационная электроника электронно-коммутируемого двигателя» ).

Частота вращения электроннокоммутируемого двигателя задается частотой окружающего поля статора. Для определения положения ротора требуются датчики. Широко распространены датчики Холла, устанавливаемые в рабочем зазоре для обеспечения цикличного переключения между ветвями обмотки с помощью активационной электроники.
Система трехфазного тока
Техническое значение имеет применение системы трехфазного переменного тока в качестве системы трехфазного тока, основной особенностью которой является то, что сумма всех напряжений и токов всегда равна нулю.
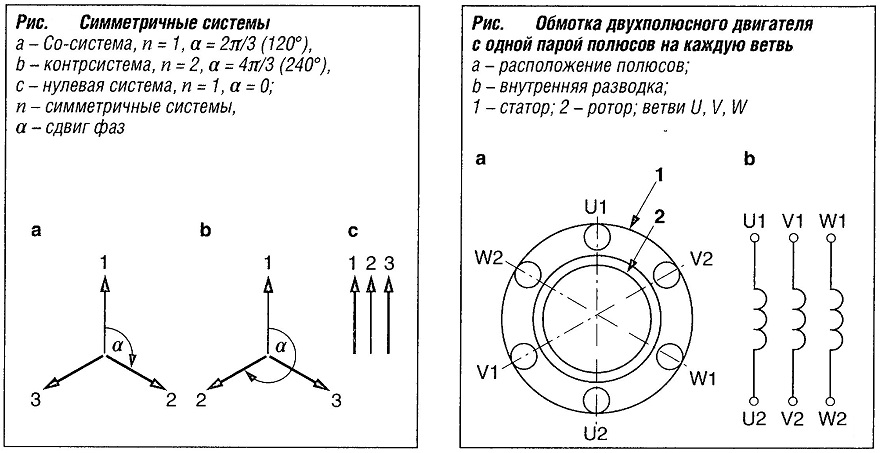
Электрические цепи называются фазами т. Совокупность электрических цепей, в которых напряжения одной частоты оказывают воздействие и имеют фазовый, сдвиг называются многофазными системами. Многофазная система состоит из ветвей обмотки. В многофазной системе может быть п = 3 симметричных систем (рис. «Симметричные системы» ). Во всех симметричных системах — за исключением нулевой системы — сумма всех векторов равна нулю. При количестве фаз т получаем п симметричных систем в зависимости от угла сдвига фаз а:
а = 2π n/m
Задача обмоток — создание вращающегося поля. Асинхронные двигатели имеют такую же конструкцию статора. В воздушном зазоре должно создаваться магнитное поле с постоянной амплитудой, вращающееся с постоянной угловой скоростью. Чтобы создать это поле, временные положения фаз токов должны совпадать с пространственными положениями соответствующих ветвей. У простой симметричной системы (п = 1) с т = 3 три ветви (обозначаемые как U, V и W) и, следовательно, обмотки должны быть равномерно распределены по окружности. На рис. «Обмотка двухполюсного двигателя с одной парой полюсов на каждую ветвь» показано расположение обмотки с тремя ветвями, с одной катушкой на каждую пару полюсов и ветвь. Схемы соединений фаз регламентируются стандартом DIN EN 60034, часть 8.
Создание вращающегося поля
 Чтобы создать вращающееся поле в случае с простой симметричной системой (п = 1) с количеством ветвей т = 3, ветви должны быть геометрически смещены на электрически эффективный угол:
Чтобы создать вращающееся поле в случае с простой симметричной системой (п = 1) с количеством ветвей т = 3, ветви должны быть геометрически смещены на электрически эффективный угол:
аеI = 360°·1/3 = 120°.
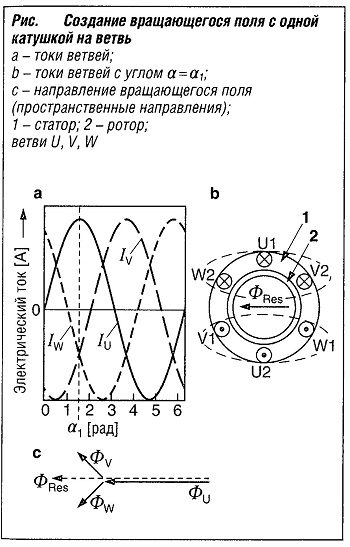
При одной катушке на каждую пару полюсов и ветвь создаваемое магнитное поле вращается против часовой стрелки, при этом «индикаторная полоска», смещающаяся вправо на рисунке а, «Создание вращающегося поля с одной катушкой на ветвь» (при а = 90°), показывает ток фазы в каждой из ветвей на рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь» в направлении магнитного потока. Расположение образует пару полюсов. Соответствующие магнитные потоки проходят вертикально к плоскости ветвей обмотки (рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь»).
Поток ФRes (рис. с, «Создание вращающегося поля с одной катушкой на ветвь»), получаемый из трех ветвей, а также его направление достигаются геометрическим сложением трех отдельных потоков ФU, ФV И ФW.
Продвижение индикаторной полоски на угол а = 180° приводит к реверсированию направления тока в ветви W и, следовательно, к дальнейшему повороту созданного поля ФRes вправо (рис. «Создание вращающегося поля с одной катушкой на ветвь 2»).
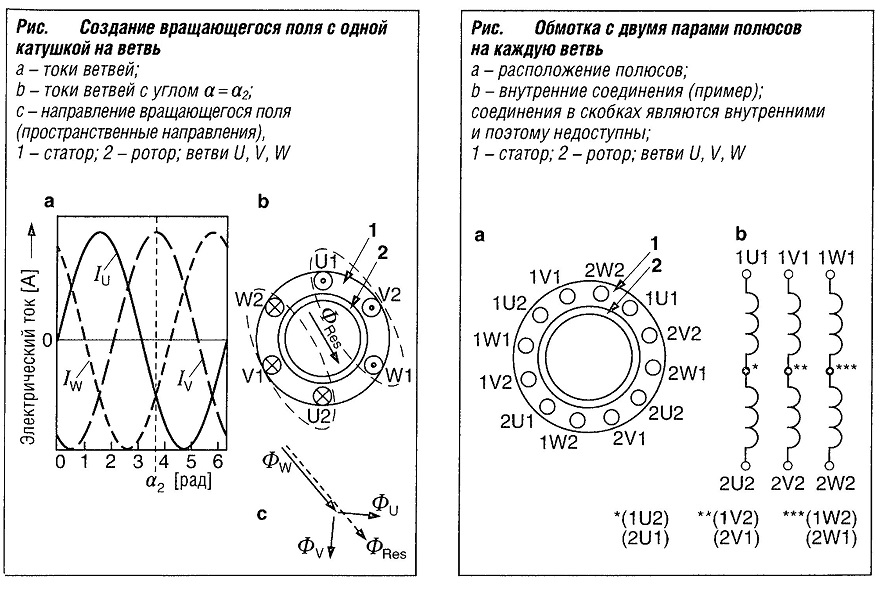
 При использовании двух катушек на одну ветвь расположение проводников «удваивается». Если обмотка должна образовывать две пары полюсов (р = 2), то обмотки необходимо делить на группы (рис. «Обмотка с двумя парами полюсов на каждую ветвь» ). При этом устанавливается механически эффективный угол:
При использовании двух катушек на одну ветвь расположение проводников «удваивается». Если обмотка должна образовывать две пары полюсов (р = 2), то обмотки необходимо делить на группы (рис. «Обмотка с двумя парами полюсов на каждую ветвь» ). При этом устанавливается механически эффективный угол:
am = 360° · (1/mp) = 60°.
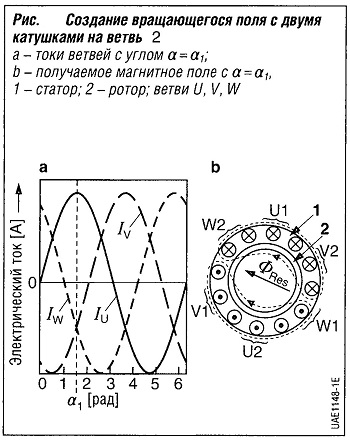
Электрически эффективный угол остается без изменения. В случае как двухполюсного, так и четырехполюсного расположения поле вращается против часовой стрелки (рис. «Создание вращающегося поля с двумя катушками на ветвь» ). Чаcтоту вращения поля:
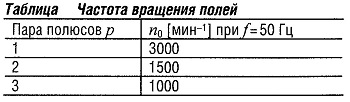
nd = fn/p
можно вычислить на основании частоты в линии fn и количества пар полюсов р. При р = 1 частота вращения поля равна частоте в линии (табл. «Частота вращающихся полей» ).
Вместе с количеством пар полюсов можно вычислить межполюсное расстояние:
τp = dsi /2π
 как долю окружности статора, где dsi — внутренний диаметр статора. Он соответствует длине синусоидальной полуволны, которая соответствует распределению индукции поля ротора. В случае с двухполюсным двигателем (р = 1), межполюсное расстояние всегда равно aei = 180° (электрический угол) и совпадает с механическим углом am. Взаимозависимость этих двух углов показывает угол aei=p—am. Чтобы в обмотках наводилось одинаковое напряжение, ветви обмотки должны быть смещены относительно друг друга на угол aei = 120° или 2τp / 3, а структура и количество катушек должны быть одинаковыми. На каждую ветвь приходится одна треть межполюсного расстояния.
как долю окружности статора, где dsi — внутренний диаметр статора. Он соответствует длине синусоидальной полуволны, которая соответствует распределению индукции поля ротора. В случае с двухполюсным двигателем (р = 1), межполюсное расстояние всегда равно aei = 180° (электрический угол) и совпадает с механическим углом am. Взаимозависимость этих двух углов показывает угол aei=p—am. Чтобы в обмотках наводилось одинаковое напряжение, ветви обмотки должны быть смещены относительно друг друга на угол aei = 120° или 2τp / 3, а структура и количество катушек должны быть одинаковыми. На каждую ветвь приходится одна треть межполюсного расстояния.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: