На страницах этого справочник мы уже неоднократно упоминали о динамике поперечного перемещения автомобиля. От того, как автомобиль может сопротивляться поперечному перемещению, во многом зависит его поведение на дороге. В этой статье мы подробно поговорим, что представляет собой динамика поперечного перемещения автомобиля.

- Диапазоны бокового ускорения
- Одноколейная линейная модель
- Способность автомобиля к восстановлению прямолинейного движения
- Коэффициент усиления рыскания
- Коэффициент демпфирования
- Диаграмма боковой подвижности автомобиля
- Динамика поперечного движения автомобиля
- Аэродинамические силы и моменты
- Боковой крен кузова в повороте
- Критические скорости при прохождении поворотов
 |
 |
Диапазоны бокового ускорения
На современных легковых автомобилях боковое ускорение может достигать 10 м/с2. Величина бокового ускорения разделяется на следующие диапазоны (рис. «Диапазоны бокового ускорения» ):
 Диапазон от 0 до 0,5 м/с2 известен под названием диапазона малого сигнала. В этом диапазоне явление возникает при прямолинейном движении под действием таких возмущений, как неровности дороги и боковой ветер. Ветровые возмущения возникают вследствие порывов ветра и при въезде в закрытые от ветра зоны и выезде из них.
Диапазон от 0 до 0,5 м/с2 известен под названием диапазона малого сигнала. В этом диапазоне явление возникает при прямолинейном движении под действием таких возмущений, как неровности дороги и боковой ветер. Ветровые возмущения возникают вследствие порывов ветра и при въезде в закрытые от ветра зоны и выезде из них.
Диапазон от 0,5 до 4 м/с2 известен под названием линейного диапазона, поскольку поведение автомобиля в этом диапазоне может быть описано при помощи линейной, одноколейной модели. К типичным маневрам, связанным с динамикой поперечного движения, относятся резкое манипулирование рулем, перестроения из ряда в ряд, а также комбинации маневров, связанных с изменением динамики как продольного, так и поперечного движения, например, вследствие реакций на изменения нагрузки при прохождении поворотов.
В диапазоне бокового ускорения от 4 до 6 м/с2, в зависимости от конструктивных особенностей автомобиля, его поведение в отношении бокового ускорения может оставаться линейным или становиться нелинейным. Поэтому этот диапазон рассматривается как переходной. В этом диапазоне автомобили с максимальным боковым ускорением от 6 до 7 м/с2 (например, внедорожные автомобили) уже демонстрируют нелинейные характеристики, в то время как автомобили, достигающие более высоких уровней бокового ускорения (например, спортивные автомобили) продолжают показывать линейные характеристики.
Боковое ускорение свыше 6 м/с2 достигается только в экстремальных ситуациях, поэтому рассматривается как предельный диапазон. В этом диапазоне характеристики автомобиля в основном нелинейные и оказывают влияние на устойчивость автомобиля. Этот диапазон достигается на спортивных трассах или в ситуациях, в условиях обычного дорожного движения приводящих к авариям.
Для среднего водителя боковое ускорение обычно составляет до 4 м/с2. Это означает, что при субъективной оценке ситуации водитель управляет автомобилем таким образом, что боковое ускорение находится в диапазоне малого сигнала или в границах линейного диапазона (рис. Диапазоны бокового ускорения). Для среднего водителя вероятность возникновения бокового ускорения экспоненциально снижается с падением скорости.
Одноколейная линейная модель
Из одноколейной линейной модели могут быть получены важные выводы, касающиеся динамических характеристик поперечного движения. В одноколейной линейной модели динамические свойства одной оси и ее колес сведены в одно эффективное колесо. В простейшем варианте, как показано здесь, рассматриваемые характеристики находятся в линейном диапазоне, что объясняет, почему модель этого типа называется одноколейной линейной моделью. Наиболее важными модельными предположениями являются следующие:
- Кинематика и эластокинематика оси моделируются только линейно;
- Поперечная сила, действующая на шину, возрастает линейно, а стабилизирующий крутящий момент игнорируется;
- Предполагается, что центр тяжести автомобиля находится на уровне дороги. Следовательно, единственной вращательной степенью свободы автомобиля является движение рыскания. Крен, продольная качка и подскоки на неровностях не учитываются.
Способность автомобиля к восстановлению прямолинейного движения
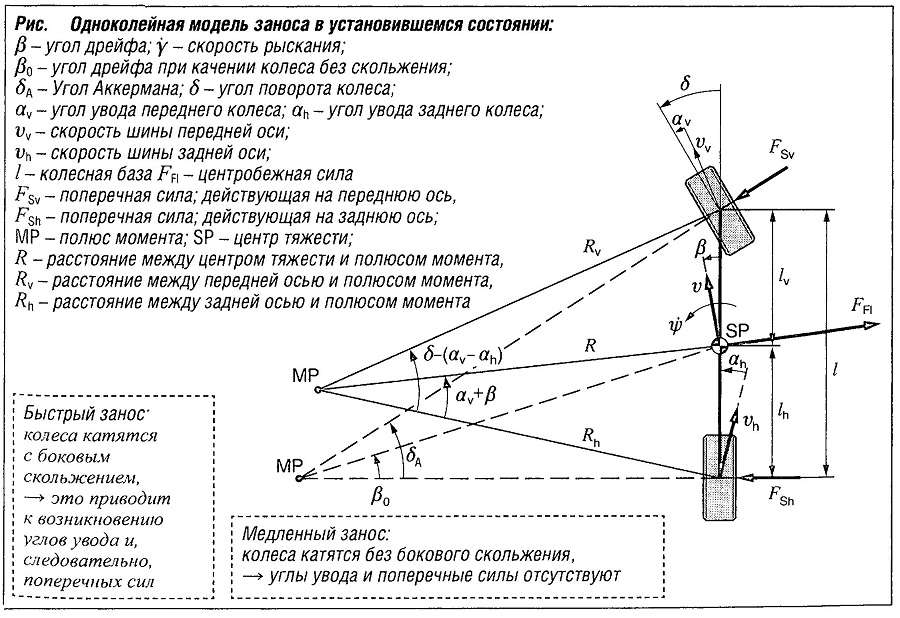
На рис. «Одноколейная модель заноса в установившемся состоянии» представлена однолинейная модель для условий быстрого и медленного заноса. Результатом этого представления являются следующие соотношения, описывающие кинематику углов скольжения:
av = δ — β — (Ψ ⋅ lv)/v
ah = — β — (Ψ ⋅ lh)/v
Вместе с балансом моментов можно вычислить изменение угла поворота рулевого колеса, связанное с увеличением бокового ускорения, в условиях маневра с заносом при постоянном радиусе. Это дает определение градиента самовыравнивания управляемых колес EG:
EG = dδ/dav = m/l⋅(lh/Cv — lv/Ch)
Конструкция всех легковых автомобилей в линейном диапазоне бокового ускорения предусматривает недостаточную поворачиваемость. Значение EG для легковых автомобилей составляет около 0,25 градус⋅с2/м.
В отношении динамики бокового движения градиент самовыравнивания управляемых колес характеризует устойчивость и демпфирование автомобиля. Кроме того, значение градиента самовыравнивания для среднего водителя становится очевидным, поскольку угол поворота колес увеличивается с ростом скорости прохождения поворота. Это привлекает внимание водителя к возрастающему боковому ускорению.
Градиент угла дрейфа (SG) можно вычислить, воспользовавшись схемой, представленной на рис. «Одноколейная модель заноса в установившемся состоянии». В целях повышения устойчивости автомобиля градиент угла дрейфа должен быть как можно меньше.
SG = dβ/day = mlv/Chl
Коэффициент усиления рыскания
Коэффициент усиления рыскания определяет степень рыскания автомобиля в ответ на изменение угла поворота рулевого колеса в квазиустойчивом состоянии. Коэффициент усиления рыскания можно определить, выполнив следующее испытание: при движении с постоянной скоростью рулевое колесо поворачивается из стороны в сторону с частотой менее 0,2 Гц. Амплитуда угла поворота рулевого колеса выбирается таким образом, чтобы максимальное боковое ускорение составило около 3 м/с2. Начиная со скорости 20 км/ч, маневр повторяется с увеличением скорости каждый раз на 10 км/ч. 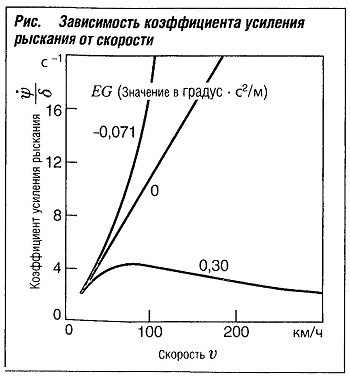 При условии отсутствия аэродинамических воздействий на высоких скоростях (подъемных сил, воздействующих на переднюю и заднюю оси), результаты испытания дают кривые коэффициента усиления рыскания, в основном согласующиеся со следующим уравнением, выведенным из одноколейной линейной модели:
При условии отсутствия аэродинамических воздействий на высоких скоростях (подъемных сил, воздействующих на переднюю и заднюю оси), результаты испытания дают кривые коэффициента усиления рыскания, в основном согласующиеся со следующим уравнением, выведенным из одноколейной линейной модели:
(Ψ/δ)stat = v/(l+EG⋅v2)
На рис. «Зависимость коэффициента усиления рыскания от скорости» показан коэффициент усиления рыскания для автомобиля, имеющего тенденцию к избыточной поворачиваемости (EG<0), нейтральную управляемость (EG=0) и тенденцию к недостаточной поворачиваемости (EG>0). При высоких скоростях движения приемлемой является только недостаточная поворачиваемость, обеспечивающая требуемую динамику автомобиля даже во время движения по прямой. Скорость, при которой автомобиль, имеющий тенденцию к недостаточной поворачиваемости, демонстрирует максимальную реакцию рыскания, известна как характеристическая скорость vchar. В линейной одноколейной модели эта скорость выражается как:
vchar = √¯l/EG
Коэффициент демпфирования
Из линейной одноколейной модели выведено следующее уравнение равновесия сил:
тaу = Fsv cos δ+Fsh.
Для баланса моментов:
Θψ = Fsv lv cos δ + Fsh lh
Коэффициент демпфирования D возмущения в отношении динамики поперечного движения может быть выведен из двух следующих уравнений:

Недемпфированная собственная частота выражается следующим уравнением:

 Коэффициент демпфирования автомобиля может быть определен, например, из реакции рыскания на резкий поворот рулевого колеса или иное ступенчатое входное воздействие. При разработке конструкции автомобиля разработчики стремятся получить как можно более высокий коэффициент демпфирования.
Коэффициент демпфирования автомобиля может быть определен, например, из реакции рыскания на резкий поворот рулевого колеса или иное ступенчатое входное воздействие. При разработке конструкции автомобиля разработчики стремятся получить как можно более высокий коэффициент демпфирования.
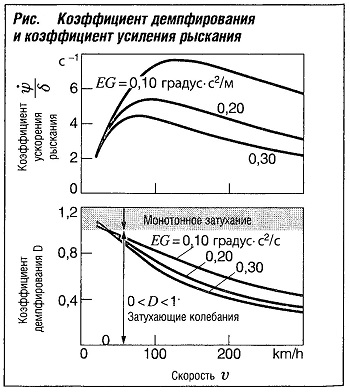
На рис. «Коэффициент демпфирования и коэффициент рыскания» показаны коэффициенты демпфирования и усиления рыскания для различных градиентов самовыравнивания. При этом имеет место следующий конфликт целей:
- если автомобиль должен обладать хорошими характеристиками прямолинейного движения, требуется высокое значение градиента самовыравнивания;
- для обеспечения высокого коэффициента демпфирования, особенно на высоких скоростях, градиент самовыравнивания должен быть как можно более низким.
Диаграмма боковой подвижности автомобиля
Еще одной важной переменной, определяющей сбалансированность автомобиля, является общее передаточное отношение рулевого механизма il. Угол поворота рулевого колеса il вычисляется, исходя из угла поворота оси, как:
δH =il ⋅ δ
Это дает следующее уравнение для максимального коэффициента усиления рыскания:
(ψ/δH)max = 1/2il√‾l⋅EG
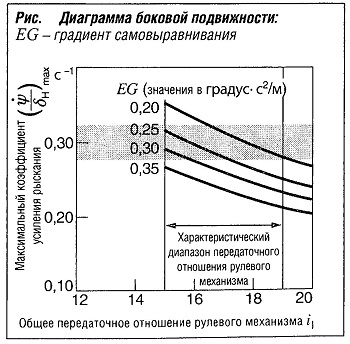 Этот максимум построен на диаграмме боковой подвижности (рис.»Диаграмма боковой подвижности» ) в функции передаточного отношения рулевого механизма. Дополнительно на диаграмме показаны изолинии EG. Вдоль этих кривых градиент самовыравнивания постоянен. На этой диаграмме могут быть построены желаемые диапазоны коэффициента усиления рыскания и передаточного отношения рулевого механизма с Целью определения необходимых градиентов самовыравнивания.
Этот максимум построен на диаграмме боковой подвижности (рис.»Диаграмма боковой подвижности» ) в функции передаточного отношения рулевого механизма. Дополнительно на диаграмме показаны изолинии EG. Вдоль этих кривых градиент самовыравнивания постоянен. На этой диаграмме могут быть построены желаемые диапазоны коэффициента усиления рыскания и передаточного отношения рулевого механизма с Целью определения необходимых градиентов самовыравнивания.
Если в автомобиле изменяется только передаточное отношение рулевого механизма, максимальный коэффициент усиления рыскания можно определить при помощи диаграммы боковой подвижности, сдвигая базовую линию вдоль изолиний EG. Если имеет место изменение характеристик оси, сдвиг осуществляется вдоль вертикальной оси.
Динамика поперечного движения автомобиля
Ветер может вызывать динамические эффекты в боковом направлении. Реакция автомобиля на эти внешние воздействия проявляется в виде отклонения от желаемой траектории движения, бокового ускорения и изменения углов рыскания и крена. Чтобы противодействовать этим изменениям, водитель пытается выполнить корректирующие действия. Следовательно, необходимо учитывать скорость реакции водителя, а также способность автомобиля к коррекции. Согласно результатам исследования, непосредственная реакция автомобиля на боковой ветер является основной переменной величиной для субъективной оценки общей устойчивости автомобиль под действием бокового ветра. Это дает преимущество, заключающееся в том, что реакцию автомобиля на боковой ветер можно эффективно оценить посредством анализа.
Характеристически средний водитель воспринимает два состояния, вызываемые возмущениями в виде бокового ветра:
- Естественный ветер, направление и скорость которого могут изменяться во время движения;
- Въезд и выезд из областей «ветровой тени», когда на автомобиль могут воздействовать силы, значительно изменяющиеся по величине.
В автомобилестроении стремятся свести к минимуму эффекты возмущений, вызываемых ветровыми нагрузками, учитывая следующие факторы:
- «Жесткость в повороте» шин, т.е. степень изменения поперечной силы при увеличении угла увода. При этом считается, что нагрузка на колесо остается постоянной;
- Общая масса автомобиля;
- Положение центра тяжести автомобиля;
- Характеристики оси;
- Симметричность и упругость подвески;
- Демпфирование;
- Кинематика и эластокинематика осей;
- Аэродинамическая форма и площадь лобовой поверхности автомобиля.
Аэродинамические силы и моменты
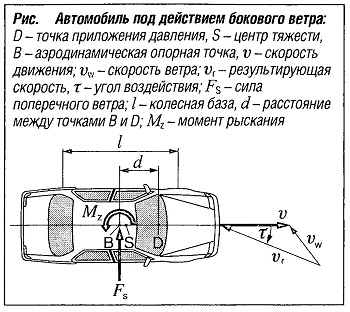
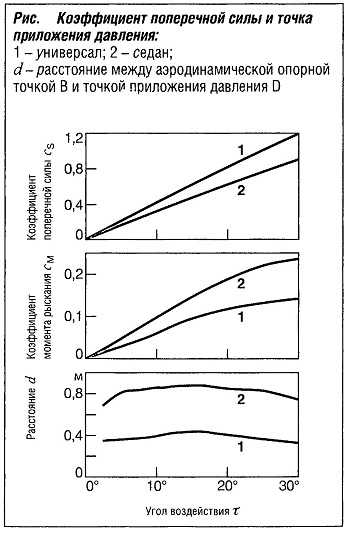
Когда автомобиль движется со скоростью v при ветре, имеющем скорость vw, на него воздействует ветер с результирующей скоростью vr. При наличии бокового ветра угол воздействия τ в общем случае отличен от 0 градусов, что приводит к возникновению поперечной силы Fs и момента рыскания Мz, воздействующих на автомобиль.
 В аэродинамике стандартной практикой является указание вместо сил и моментов безразмерных коэффициентов. Отсюда:
В аэродинамике стандартной практикой является указание вместо сил и моментов безразмерных коэффициентов. Отсюда:
Fs = (cs ρ/2) vr2A,
Mz = (cM ρ/2) vr2A l
Момент Мz и поперечная сила Fs, определенные в средней точке колесной базы, могут быть представлены единой поперечной силой Fs, когда точка приложения воздействия совпадает с точкой приложения давления D (рис. «Автомобиль под действием бокового ветра» ). Расстояние d между аэродинамической опорной точкой В и точкой приложения давления D вычисляется следующим образом:
d = Mz/Fs = cMl/cs
 Чтобы в максимальной степени уменьшить влияние аэродинамических эффектов, следует принять меры к тому, чтобы точка приложения давления D находилась как можно ближе к центру тяжести автомобиля. Это существенно снизит эффективное влияние момента.
Чтобы в максимальной степени уменьшить влияние аэродинамических эффектов, следует принять меры к тому, чтобы точка приложения давления D находилась как можно ближе к центру тяжести автомобиля. Это существенно снизит эффективное влияние момента.
На рис. «Коэффициент поперечной силы и точка приложения давления» представлены аэродинамические коэффициенты для двух наиболее типичных кузовов автомобиля, универсала и седана, в функции угла воздействия τ. Результирующее расстояние d для универсалов значительно меньше, чем для седанов (см. рис. «Автомобиль под действием бокового ветра» ). Для автомобилей с центром тяжести, расположенным посередине колесной базы, конструкция универсала, следовательно, менее чувствительна к боковому ветру, чем у седана.
Поведение в повороте
Центробежная сила, действующая в повороте (рис. «Действие центробежной силы в повороте» ):
Fcf = mv2 / rk
Боковой крен кузова в повороте
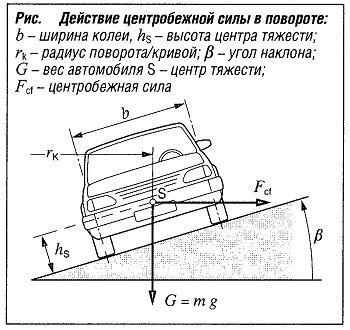 При движении в повороте центробежная сила, приложенная в центре тяжести автомобиля, наклоняет кузов. Величина крена зависит от упругих характеристик подвески и ее восприимчивости к деформации, а также от плеча действия центробежной силы (расстояние между осью крена и центром тяжести автомобиля). Ось крена является одновременно мгновенной осью вращения кузова относительно поверхности дороги. Подобно всем жестким телам, кузов автомобиля подвергается совместному воздействию на него скручивающих и поворачивающих усилий, усугубляющих крен; это движение дополняется боковым смещением вдоль мгновенной оси.
При движении в повороте центробежная сила, приложенная в центре тяжести автомобиля, наклоняет кузов. Величина крена зависит от упругих характеристик подвески и ее восприимчивости к деформации, а также от плеча действия центробежной силы (расстояние между осью крена и центром тяжести автомобиля). Ось крена является одновременно мгновенной осью вращения кузова относительно поверхности дороги. Подобно всем жестким телам, кузов автомобиля подвергается совместному воздействию на него скручивающих и поворачивающих усилий, усугубляющих крен; это движение дополняется боковым смещением вдоль мгновенной оси.
Чем ближе расположена ось крена к центру тяжести автомобиля, тем выше его поперечная устойчивость и меньше крен при движении в повороте. Однако обычно это вызывает соответствующее перемещение вверх колес, что приводит к изменению колеи и оказывает негативное влияние на безопасность движения. Поэтому следует стремиться к тому, чтобы высокое расположение мгновенного центра крена сочеталось с минимальными изменениями колеи автомобиля. Таким образом, целью конструкторов является расположение мгновенных осей наклонов колес как можно выше относительно кузова и одновременно как можно дальше от него.
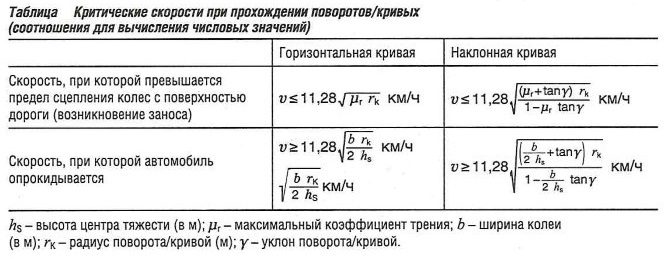
Таблица «Критические скорости при прохождении поворотов»
Часто для нахождения (приблизительного) оси крена определяются центры вращения (центры крена) так называемого эквивалентного кузова. При этом рассматривают перемещение кузова в двух вертикальных относительно дороги плоскостях, проходящих через переднюю и заднюю оси автомобиля. Центры крена — это те гипотетические точки на кузове, которые остаются неподвижными при крене. Ось крена, в свою очередь, представляет собой линию, соединяющую эти точки. Графическое представление центров крена базируется на правиле, согласно которому мгновенные центры вращения трех систем в состоянии относительного движения лежат на одной линии.
Сложность операций, требующихся для более точного определения пространственных соотношений, описывающих движение колеса, делает целесообразным использование трехмерной модели.