
Адаптивный круиз-контроль представляет собой модернизированную систему круиз-контроля, которая не только автоматически поддерживает скорость движения, но и соблюдает безопасную дистанцию до впереди идущего автомобиля, адаптируясь под текущую ситуацию на дороге.

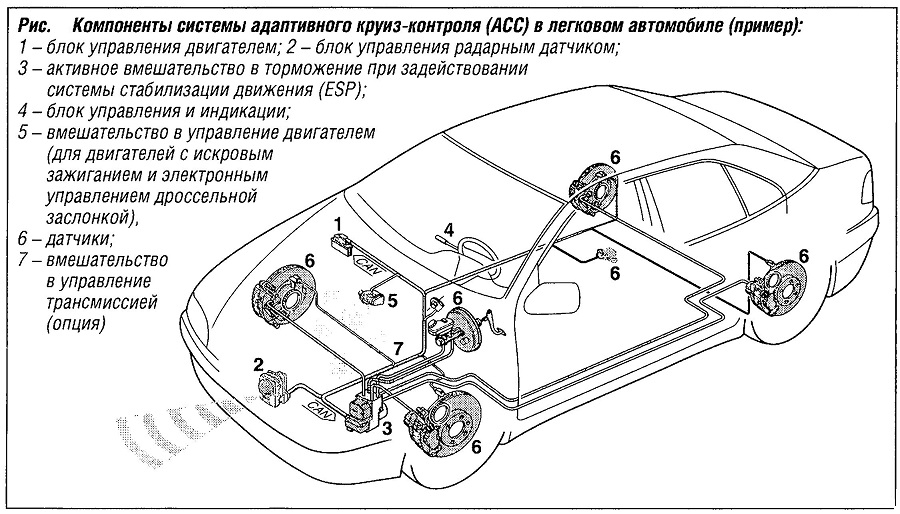
Как и базовая система круиз-контроля, которая в течение многих лет поставлялась в виде компонента стандартной комплектации, система «адаптивного круиз-контроля» (АСС) может считаться системой повышения безопасности. Контроллер скорости автомобиля регулирует скорость движения до требуемой величины, заданной водителем, при помощи органа управления системы круиз-контроля. В дополнение к этой функции, адаптивный контроллер скорости автомобиля анализирует информацию об относительной скорости и расстоянии до впереди идущего автомобиля, а также о дополнительных параметрах движения управляемого вами автомобиля (например, угол поворота, скорость поворота) и использует данные для регулирования расстояния между автомобилями. Таким образом, регулируется скорость и поддерживается безопасное расстояние до идущего впереди автомобиля. Адаптивный контроллер скорости автомобиля оборудован радаром дальнего действия, чтобы обнаруживать автомобили, движущиеся впереди по той же полосе, а также препятствия, движущиеся в пределах дальности действия датчиков и требующие применения тормозов автомобиля (рис. «Компоненты системы адаптивного круиз-контроля (ACC) в легковом автомобиле»).
Конструкция и функция адаптивного круиз-контроля
Адаптивный контроллер скорости автомобиля — это система, избавляющая водителя от необходимости выполнять рутинные действия, но не от обязанности управлять автомобилем. Поэтому водитель может в любой момент взять под контроль функцию управления, вмешавшись в ее работу или отключив ее (например, работая педалью акселератора или тормоза).
Датчик измерения расстояния
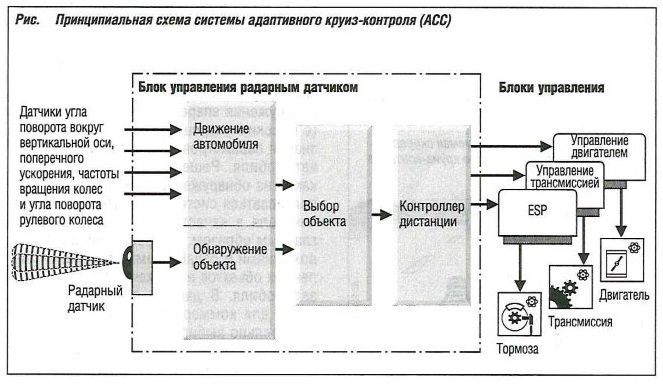
Современные системы адаптивного круиз- контроля (АСС) обычно оборудованы радарным датчиком, работающим в диапазоне частот 76-77 ГГц (см. раздел «Датчики»). Лучи радара, излучаемые радарным датчиком, отражаются от идущих впереди автомобилей; анализируется их время возвращения, допплеровский сдвиг и соотношение амплитуд. Эти величины используются для расчета расстояния, скорости и углового положения идущих впереди автомобилей. Электронные компоненты для анализа и управления (блок проверки радара) смонтированы в корпусе датчика. Они обмениваются данными через шину данных CAN с другими электронными блоками, отслеживающими скорость двигателя и действие тормозов (рис. «Принципиальная схема системы адаптивного круиз-контроля (ACC)«).
Имеются также системы адаптивного круиз- контроля (АСС), использующие лазерные лучи инфракрасного диапазона (лидар). Принцип работы тот же, но при этом следует учитывать ограничение функциональности оптического зондирования в плохую погоду (туман, дождь, снег), по сравнению с радарным зондированием.
Курсовая устойчивость
Для обеспечения надежной работы системы АСС в любых условиях, например, на поворотах, важно, чтобы можно было ассоциировать впереди идущие автомобили с определенными полосами движения. Для этого информация от датчиков электронной системы стабилизации движения ESP (угловая скорость поворота, угол поворота рулевого колеса, частота вращения колес и поперечное ускорение) анализируется в отношении фактической кривой движения транспортного средства, оснащенного АСС.
Ввод данных
Водитель вводит необходимую скорость движения и желаемый временной интервал, который может устанавливаться в диапазоне от 1 до 2 секунд. Временной интервал до впереди идущего автомобиля рассчитывается по сигналам от радара и сравнивается с временным интервалом, заданным водителем. Если временной интервал меньше заданного, система адаптивного круиз-контроля отвечает сообразно дорожной обстановке, сперва понижая обороты двигателя, а затем, при необходимости, автоматически подключая тормоза автомобиля. Если заданный временной интервал превышен, автомобиль ускоряется до тех пор, пока не будет достигнута скорость впереди идущего автомобиля или скорость, заданная водителем.
Управление работой двигателя при круиз-контроле
Управление скоростью требует наличия электронной системы управления двигателем. Эта система позволяет разгонять автомобиль до требуемой скорости или, при появлении препятствия, затормаживать его посредством автоматически управляемого акселератора (регулирования оборотов и тяги).
Включение тормозов
Если торможения двигателем недостаточно, следует применить тормоза. Для этого легковой автомобиль должен иметь модуль электронной системы стабилизации движения (ESP), которая может задействовать тормоза. Для коммерческого транспорта достаточно иметь электронную тормозную систему (EBS). Обычно также используются имеющиеся средства снижения скорости или торможения двигателем для уменьшения износа.
Поскольку система адаптивного круиз- контроля (АСС) конфигурируется, как система повышения комфорта, в настоящее время замедление, управляемое контроллером, ограничено величиной приблизительно 2-3 м/с2. Если этого оказывается недостаточно, в связи с текущей дорожной обстановкой (например, впереди идущие автомобили резко тормозят), водителю подается визуальный и акустический сигнал о том, что он должен взять управление на себя. Тогда водитель проводит торможение обычным образом. Система адаптивного круиз-контроля не включает в себя функции безопасности дорожного движения, такие, как экстренное торможение.
При необходимости, при активированной системе адаптивного круиз-контроля, системы ABS или ESP действуют в нестандартном режиме. В зависимости от настроек системы адаптивного круиз-контроля, вмешательство систем ABS, TCS или ESP может привести к отключению системы адаптивного круиз-контроля.
Дисплей
 Водитель должен получать, как минимум, следующую информацию:
Водитель должен получать, как минимум, следующую информацию:
- Индикация заданной скорости;
- Индикация состояния систем;
- Индикация желаемого временного интервала движения, выбранного водителем;
- Индикация режима «преследования», информирующая водителя, действительно ли система контролирует расстояние до выявленного объекта.
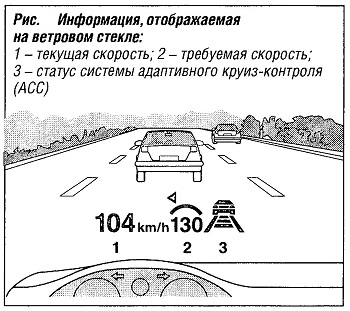
Эта информация может быть выведена, например, на приборную панель или на ветровое стекло (рис. «Информация, отображаемая на ветровом стекле» ) (см. раздел «Индикация на ветровом стекле» ).
Алгоритмы управления круиз-контролем
Модули управления круиз-контролем
В общем виде система управления и для легковых, и для грузовых автомобилей состоит из трех модулей управления.
Круиз-контроль
Если радарный датчик не обнаружил впереди идущих автомобилей, система поддерживает скорость автомобиля, заданную водителем.
Система управления тяговым усилием
Радарный датчик обнаружил впереди идущие автомобили. Система поддерживает постоянный временной интервал до ближайшего автомобиля на постоянной величине.
Управление при поворотах
На крутых поворотах радарный датчик может «потерять» впереди идущий автомобиль ввиду ограниченного угла обзора. До тех пор, пока этот автомобиль не появится в поле зрения радара снова или пока система не переключится в нормальный режим круиз-контроля, система принимает особые меры. В зависимости от марки автомобиля, скорость, например, может поддерживаться постоянной, регулируется боковое ускорение, или система адаптивного круиз-контроля отключается.
Обнаружение объектов и закрепление их за полосами движения
Основная задача радарного датчика и его электронных систем в том, чтобы обнаруживать объекты и закреплять их за соответствующими полосами движения: за той же, на которой находится собственный автомобиль, или за другой. Такое закрепление объектов за их полосами движения требует точности обнаружения впереди идущих автомобилей (с высоким разрешением), а также точного знания параметров движения собственного автомобиля. Решение относительно того, какой из обнаруженных объектов будет использоваться системой адаптивного круиз- контроля в качестве опорного, основано, главным образом, на сравнении между положениями и параметрами движения выявленных объектов и движением собственного автомобиля. В данном случае, в особенности для коммерческих автомобилей, не обязательно выбирать ближайший впереди идущий автомобиль в качестве опорного объекта. При некоторых условиях может быть более разумно выбирать второй автомобиль, а не ближайший, например, если легковой автомобиль вклинивается с соседней полосы и продолжает ускоряться, чтобы перестроиться обратно.
Электронная структура
Кроме данных, получаемых от датчиков (рис. «Принципиальная схема системы адаптивного круиз-контроля (ACC)» ), система адаптивного круиз-контроля (АСС) требует дополнительных данных о работе двигателя, системе замедления (для коммерческих автомобилей), блоков управления трансмиссией и ESP; эти данные передаются по шине данных CAN. С другой стороны, эти блоки управления преобразуют ускорения, задаваемые системой адаптивного круиз-контроля в сигналы для двигателя и тормозов. Координация управляющих сигналов (например, соотношение между требуемым торможением и возможностями тормозной системы) может происходить или в блоке ESP, или в управляющем компьютере, или собственно в системе адаптивного круиз-контроля (АСС).
Регулировка
Радарный датчик установлен в передней части автомобиля. Направление сканирования радара сориентировано вдоль продольной оси автомобиля. Это направление регулируется винтами, находящимися в месте крепления датчика. Если направление сбито под воздействием физических факторов, например, из-за деформации места установки, или по иной причине, требуется провести новую регулировку. Регулировка на незначительные отклонения производится автоматически, через алгоритмы, запрограммированные в программном обеспечении. Если требуется ручная регулировка, сообщение об этом посылается водителю.
Сфера применения и перспективы новых разработок
Легковые автомобили
Использование системы адаптивного круиз-контроля (АСС) увязано с наличием электронной стабилизации движения (ESP). Это — требование для применения активного торможения без участия водителя.
Грузовые автомобили
Торможение
Стандартная тормозная система начинает участвовать в торможении только тогда, когда имеющиеся средства замедления (или торможение двигателем) более недостаточны для замедления автомобиля в том режиме, который предписан системой адаптивного круиз-контроля. Поэтому износ тормозов, вызываемый системой адаптивного круиз-контроля, находится на том же уровне, как при управлении водителем, обладающим плавной манерой езды.
Наряду с описанными системами адаптивного круиз-контроля, имеются системы АСС, которые управляют только оборотами двигателя или ускорением и торможением двигателем. Для таких систем диапазон применения ограничен существенно меньшим возможным замедлением, т.е. водитель вынужден чаще вмешиваться в управление.
Конструктивные требования
В общем виде и для автобусов, и для грузовиков, и для тракторов пригодна одна и та же система адаптивного круиз-контроля (АСС). Такая система покрывает все требования относительно двигателей и тормозных систем, механических, полуавтоматических и автоматических коробок передач. Единственное значимое различие в конфигурации — для автобусов, в особенности — в отношении требований комфорта.
Некоторые основные требования к системам адаптивного круиз-контроля для коммерческих автомобилей существенно отличаются от требований к системам для легковых автомобилей:
- Требования к параметрам ускорения и торможения должны учитывать значительные различия в весе транспортных средств и мощности двигателя.
- Маневры обгона и перестроения для грузовиков происходят гораздо медленнее для грузовиков, чем для легковых автомобилей, что определяет различные требования к управлению и настройкам.
- Динамика управления должна быть адаптирована к ситуации, когда несколько автомобилей, оборудованных системами адаптивного круиз-контроля, движутся вместе в колонне.
- Задача несколько упрощается в связи с тем, что грузовики имеют меньший диапазон скоростей, чем легковые автомобили.
- Коммерческое применение грузовых автомобилей означает, что основной упор при конфигурировании их систем делается на экономичность, а не на спортивные качества или комфорт. Расход топлива и износ с применением систем адаптивного круиз-контроля должен быть, как минимум, не хуже, чем при управлении средним водителем.
Перспективы развития систем адаптивного круиз-контроля (АСС)
Система адаптивного круиз-контроля «АСС plus»
Прежние системы адаптивного круиз-контроля имели функциональные ограничения, вызванные ограниченными возможностями датчиков и контроллеров. Ограниченная дальность и горизонтальная разрешающая способность приводили к тому, что системы были применимы только при скоростях свыше 30 км/ч. Поэтому раньше системы адаптивного круиз-контроля не могли применяться на меньших скоростях и на стоянке. Система адаптивного круиз- контроля «АСС plus» (находящаяся в серийном производстве, начиная с 2009 года) оборудована радарным датчиком с более широким угловым покрытием (±15°) и улучшенными способностями по обнаружению объектов, поэтому она работает и при торможении до остановки и трогании с места под управлением водителя. Чтобы вновь активировать такую систему, достаточно нажать на педаль акселератора в течение заданного интервала времени.
Благодаря своей большей гибкости и хорошей способности обнаруживать объекты на близком расстоянии, такая система адаптивного круиз-контроля может использоваться также и в дорожной пробке.
Система адаптивного круиз-контроля с отслеживанием по малым скоростям
Система адаптивного круиз-контроля «АСС LSF» (LSF: Отслеживание по малым скоростям), создана на основе системы адаптивного круиз- контроля «АСС plus». Данные от датчика радара дальнего действия в сочетании с данными от датчиков средней и малой дальности (датчиков радара ближнего действия и ультразвуковых датчиков) используются для обеспечения большей надежности обнаружения объектов перед автомобилем по всей его ширине. Система адаптивного круиз-контроля «АСС LSF» работает в диапазоне скоростей 0-200 км/ч, может затормозить автомобиль до полной остановки и автоматически включается снова через заданный промежуток времени.
Соединение системы адаптивного круиз- контроля (АСС) с системой навигации
Нa базе цифровых карт возможно предсказание поворотов дороги. В данном случае можно, например, определить задание «через 50 м поворот», используя процессы интерполяции на основе существующих точек данных. В данном принципе могут содержаться проблемы, вызванные неточностью самих цифровых карт, или если карта не соответствует фактическому местоположению на дороге. Однако, качество оцифровки карт постоянно повышается. В будущем дополнительные функции станут возможны с добавлением дополнительной информации (такой, как количество полос или тип дороги).
Сочетание данных отдатчиков с видеоданными
Сочетание данных от датчиков с данными от видеокамеры помогает обнаруживать и классифицировать объекты. Это позволяет управлять автомобилем, ориентируясь также и на неподвижные объекты.
Сочетая возможности системы адаптивного круиз-контроля «АСС LSF» с видео технологиями, в будущем станет возможно обеспечивать полную линейную маршрутизацию во всех диапазонах скоростей, а также и в условиях движения по городу (FSR: полный диапазон скоростей).
Система адаптивного круиз-контроля (АСС) также может быть основой для разработки вспомогательных систем, автоматически вмешивающихся в управление в опасных ситуациях, чтобы избежать аварий или свести к минимуму их последствия (см. ниже раздел «Предсказывающие системы экстренного торможения»). Перспективные разработки касаются автоматического маневрирования при помощи рулевого управления для предупреждения аварий.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: