Большим недостатком автомобилизации являются дорожно-транспортные происшествия (ДТП). На автомобильных дорогах, улицах городов и других населенных пунктов нашей страны в год погибает до 30 тыс. человек. Для повышения безопасности дорожного движения необходимо одновременное совершенствование и развитие конструкций автомобилей. Вот о том, какие бывают системы повышения безопасности дорожного движения, мы и поговорим в этой статье.

Ситуации, связанные с безопасностью дорожного движения
Системы повышения безопасности нацелены на то, чтобы помочь водителю оценить дорожную ситуацию, выявить источники опасности и совершить соответствующие маневры. Задача состоит в том, чтобы, предпочтительно, полностью исключить дорожные происшествия или, как минимум, свести их последствия к минимуму.
При возникновении ситуации, опасной с точки зрения безопасности дорожного движения, зачастую всего за доли секунды решается, произойдет ли авария. Согласно исследованию, приблизительно 60% столкновений с задней частью автомобиля и приблизительно 30 % столкновений с передней частью автомобиля можно было бы избежать, если бы водитель отреагировал на опасность на полсекунды раньше. Каждой второй аварии на пересечениях дорог можно было бы избежать при условии более быстрой реакции водителя.
В конце 1980-х годов, когда была представлена концепция высокоэффективной и частично автоматизированной системы управления дорожным движением в рамках проекта ЕС «Прометей», электронных компонентов системы еще не было. Благодаря вновь созданным высокочувствительным датчикам и мощным микрокомпьютером еще на один шаг приблизились к созданию «интеллектуального» автомобиля. Датчики принимают информацию об окружающей обстановке, а системы повышения безопасности вырабатывают предупреждения на основе данных о выявленных объектах или непосредственно совершают требуемые маневры. Все это происходит в течение тех решающих долей секунды, которых недостаточно для реакции даже самого внимательного и опытного водителя.
Причины аварий и возможные контрмеры
Анализ причин аварий на дорогах Германии вне зон застройки показывает, что более трети общего количества аварий произошло потому, что водитель менял полосу движения или не смог остаться на прежней полосе движения (рис. «Причины аварий на дорогах Германии вне зон застройки» ). 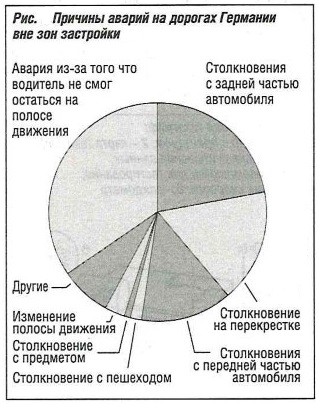 Системы повышения безопасности, способные обозревать «слепую зону» и подавать предупреждения об опасностях, связанных с изменением полосы движения, являются средством уменьшения количества аварий, вызванных указанными причинами.
Системы повышения безопасности, способные обозревать «слепую зону» и подавать предупреждения об опасностях, связанных с изменением полосы движения, являются средством уменьшения количества аварий, вызванных указанными причинами.
Приблизительно еще треть аварий составляют столкновения с задней и передней частью автомобиля. Системы предупреждения столкновений могут представлять собой первый уровень защиты против таких столкновений. Вторым уровнем защиты могут быть системы ухода от столкновений, которые активно вмешиваются в управление динамикой автомобиля. Первый шаг в этом направлении уже сделан с разработкой адаптивного круиз-контроля (АСС).
Аварии, в которых участвуют пешеходы, и аварии на пересечениях дорог отличаются высоким уровнем сложности. Анализ таких сложных дорожных ситуаций по плечу только сетевым системам с возможностями интерпретации сценариев. Исследователи сейчас заняты разработкой таких систем.
Многофункциональные системы повышения безопасности делятся на следующие две категории:
- Системы безопасности, нацеленные на предотвращение аварий;
- Системы создания комфортных условий для водителя, имеющие в качестве перспективной цели обеспечение частичной автоматизации управления автомобилем.
Можно также выделить следующие различия между системами:
- Активные системы, вмешивающиеся в управление динамикой автомобиля;
- Пассивные системы, т.е. такие, которые предоставляют информацию, но не вмешиваются в управление динамикой автомобиля.
Функции удобства и функции безопасности
На рис. «Системы повышения безопасности, имеющие функции безопасности и обеспечения управления и основанные на датчиках кругового обзора» показаны различные системы повышения безопасности. Системы пассивной безопасности (рис. нижний левый угол) обеспечивают функции для уменьшения последствий аварии, такие, как подготовка к столкновению и меры защиты пешехода.
Системы помощи водителю, не вмешивающиеся в управление автомобилем (нижний правый угол) создают предпосылки для облегчения работы водителя. Такие системы подают водителю предупреждения или рекомендации относительно маневра. Средства облегчения парковки включают разнообразные функции, от простой подачи сигнала о расстоянии до помехи до частично автоматизированного движения автомобиля на свободное место для парковки, при котором водителю требуется только управлять автомобилем по продольной оси (помощник руления при парковке).

Выявление потенциально опасных объектов в «слепой зоне» осуществляется датчиками ближнего действия (например, ультразвуковыми или радарными датчиками). Видео датчики могут быть успешно использованы для улучшения обзора для водителя в ночное время. Система предупреждения о смене полосы движения использует видеокамеру для мысленного продолжения полосы движения перед автомобилем и предупреждения водителя об уходе с полосы движения при том, что сигнал об изменении движения не был подан. Предупреждение может быть подано в виде звукового сигнала через динамики, или механически в форме изменения усилия на рулевом колесе.
Адаптивный круиз-контроль (АСС)
Адаптивный круиз-контроль (АСС) — одна из систем управления автомобилем (верхний правый угол иллюстрации). Более продвинутая версия этой системы снимает с водителя часть задач по управлению в сложной обстановке движения в медленном потоке и большим количеством автомобилей в потоке — сперва, задействуя тормоза до полной остановки, а затем ведя автомобиль вперед на малой скорости (АСС, функция Stop & Go). В качестве дальнейшего развития этой системы предполагается организовать взаимодействие между различными датчиками, чтобы обеспечить возможность линейного контроля автомобиля даже для езды по городу и на больших скоростях. Это будет сделано на основе интеграции данных от радаров и видеосистем.
Путем интеграции систем линейного контроля с системами бокового обзора (системами отслеживания положения на полосе тоже основанными на видео технологиях) теоретически возможно создать автономную систему управления. Системы отслеживания положения на полосе — это дальнейшее развитие систем предупреждения о смене полосы движения.
Активные системы безопасности дорожного движения (верхний левый угол иллюстрации) охватывают все функции, имеющие целью предотвратить аварии. Повышенные требования, предъявляемые к таким системам в отношении функциональности и надежности, распространяются от простой функции остановки автомобиля до того, как он столкнется с препятствием во время парковки, до функции компьютеризированного управления маневром для ухода от столкновений. Функции средней сложности обеспечиваются выдачей предупреждений и прогнозов от систем безопасности дорожного движения. В этот ряд включены такие функции, как предупредительное задействование тормозов при обнаружении опасности, посредством кратких циклов торможения (кинестетическое предупреждение водителю), вплоть до экстренного торможения.
Электронные датчики кругового обзора
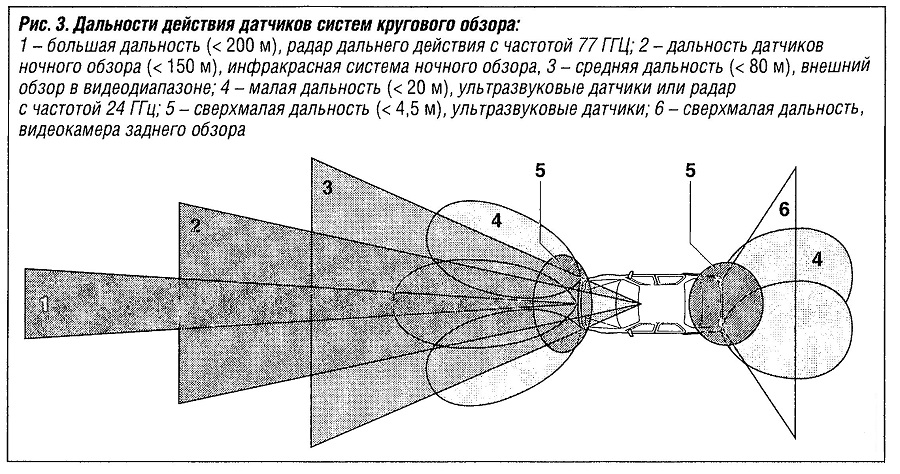
Применение электронных систем кругового обзора позволяет обеспечить ряд функций облегчения труда водителя — как предупредительных, так и активного вмешательства в управление. На рис. «Дальность действия датчиков системы кругового обзора», показана дальность обнаружения для различных датчиков систем кругового обзора, используемых в настоящее время.
Очень малая дальность обзора
Система помощи при парковке ParkPilot действует на очень небольшом расстоянии посредством ультразвука. Используемые в настоящее время датчики имеют дальность приблизительно 2,5 м. Версии датчиков с дальностью свыше 4 м также используются в более продвинутых системах помощи при парковке и для перемещения автомобиля на свободное место для парковки.
Во время маневров для парковки система ParkPilot, основанная на ультразвуке, может использоваться в сочетании с видео датчиками, установленными в задней части автомобиля.
Большая дальность обзора
Большая дальность обеспечивается применением радаров большой дальности (LRR) в системах повышения безопасности движения. В данное время используются датчики с рабочей частотой 76,5 ГГц и дальностью примерно 200 м.
Малая дальность обзора
Ультразвуковые датчики с увеличенной дальностью могут использоваться в качестве «виртуального щита безопасности» вокруг автомобиля, с определенными ограничениями (до 20 м). Этот щит может выполнять ряд функций. Во-первых, сигналы от помех, находящихся в пределах этой дальности, предупреждают водителя о потенциально опасных ситуациях; во-вторых, эта система служит источником данных для систем безопасности и создания комфорта и удобства работы для водителя. Эти датчики могут также обеспечивать обзор даже в «слепых зонах». Для обеспечения большей дальности могут использоваться датчики радаров ближнего действия (SRR) с рабочей частотой 24 ГГц.
Средняя дальность
Начиная с 2005 года, в Германии серийно выпускаются автомобили, оборудованные системами улучшения обзора в ночное время. В будущем такие системы будут играть ключевую роль среди систем повышения безопасности, поскольку они не только выполняют ряд функций для облегчения управления автомобилем, но и специально предназначены для анализа визуальной информации (классификация объектов).
При выполнении функции улучшения видимости в ночное время, пространство перед автомобилем подсвечивается инфракрасным лучом. На дисплее показано изображение от камеры, которая работает также в инфракрасном диапазоне. Поле зрения для водителя увеличивается до 150 м и более, причем инфракрасный луч не слепит других водителей и может быстрее идентифицировать помехи и опасности в темноте.
Дневная и ночная камера фронтального обзора помогает обеспечивать ряд функций, например, определение полосы движения и дорожных знаков. Система определения полосы движения помогает определять границы и направление полосы движения. Если есть опасность ухода автомобиля с полосы, система подает предупреждение водителю. При дальнейшем развитии этой системы можно обеспечить функцию автоматизированной помощи водителю для удержания автомобиля на полосе движения, когда система возвращает автомобиль на полосу, повернув рулевое колесо. В сочетании с системой круиз-контроля может быть сформирована идеальная система облегчения управления автомобилем в условиях плотного медленного потока.
Еще одна функция, для которой пригодятся данные от видео сенсоров — распознавание дорожных знаков. Эта система может распознавать и анализировать дорожные знаки (например, ограничение скорости или запрет обгона). Затем на комбинации приборов отображается последний из распознанных дорожных знаков. При превышении скорости подается предупреждение водителю.
Камера фронтального обзора также помогает датчикам системы круиз-контроля, не только измеряя расстояния до объектов, но и помогая затем в их идентификации. Сочетание видеосистемы с радаром дальнего действия дает синергетический эффект — и дальность обнаружения, и надежность идентификации объектов существенно улучшаются для системы круиз-контроля.
Камера заднего обзора обеспечивает важные преимущества, если программы обработки изображения идентифицируют обнаруженные объекты и подают сигналы водителю в случае необходимости. Такая необходимость может возникнуть, например, если смена полосы движения может быть опасной, т.к. быстро приближается другой автомобиль по соседней полосе.
В настоящее время в системах повышения безопасности, обеспечивающих информирование водителя, используются видео технологии. Современные видео датчики пока еще далеки от возможностей человеческого глаза в отношении разрешающей способности, чувствительности и световосприятия. Однако, развитие методов обработки изображений расширяет возможности этих датчиков.
Синтез информации от датчиков
Для того чтобы обеспечить гибкость функций помощи водителю и одновременно получить возможность идентификации нескольких объектов одновременно, в будущем предполагается совместно обрабатывать сигналы от многих датчиков. Эта процедура именуется «синтезом информации от датчиков». Она позволяет системам повышения безопасности формировать цельную реалистичную картину дорожной обстановки. Таким образом, информация о дорожной обстановке оказывается более надежной, чем, если бы она формировалась на основе данных от отдельных датчиков.
В будущем системы повышения безопасности будут постепенно включать в себя функции все новых и новых датчиков и устройств, и будут получать новые связи с другими системами автомобиля.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: