
Тяжелые грузовики существенно отличаются от легковых автомобилей намного большей массой в сочетании с более высоким центром тяжести и дополнительными степенями свободы, обусловленными движением с прицепом. Поэтому они могут подвергаться неустойчивым состояниям, выходящим далеко за рамки заноса, случающегося с легковыми автомобилями. К таким состояниям относятся складывание автопоездов, вызываемое, к примеру, заносом прицепа и опрокидывание, вызываемое большим поперечным ускорением. Поэтому система динамической стабилизации для грузовых автомобилей должна наряду с обеспечением стабилизации, как у легковых автомобилей, также предотвращать складывание автопоезда и опрокидывание.

- Требования к системе динамической стабилизации для грузовых автомобилей
- Применение системы динамической стабилизации для грузовых автомобилей
- Принцип действия системы динамической стабилизации для грузовых автомобилей
- Конструкция системы динамической стабилизации грузовых автомобилей
- Функции обеспечения безопасности и контроля
Требования к системе динамической стабилизации для грузовых автомобилей
В дополнение к требованиям, предъявляемым к легковым автомобилям, система динамической стабилизации у грузовиков, на основании расширенных функций, должна:
- Улучшать курсовую устойчивость и реакцию автопоезда или сочлененного автобуса в пределах физически возможного во всех режимах и при любой загрузке; сюда относится предотвращение складывания автопоездов;
- Снижать риск опрокидывания автомобиля или автопоезда как в квазистационарном режиме, так и при маневрах.
Эти требования, реализованные в ESP грузовых автомобилей, приводят, как в случае с легковыми автомобилями, к значительному повышению безопасности движения. По этой причине европейское законодательство, начиная с 2011 года, требует постепенного ввода системы динамической стабилизации для тяжелых грузовиков (более 7,5 т) (неотъемлемая часть ECE-R 13).
Применение системы динамической стабилизации для грузовых автомобилей
Между тем, ESP у грузовых автомобилей теперь предлагается практически для всех конфигураций автомобилей (кроме полноприводных):
- Автомобили с колесными формулами 4×2, 6×2, 6×4 и 8×4;
- Тягачи с полуприцепами (сочлененные автомобили или просто полуприцепы);
- Тягачи с прицепами (автопоезда);
- Тягачи с несколькими прицепами (Eurokombi), т.е. тягач, низкорамный прицеп и полуприцеп или полуприцеп с дополнительным прицепом с одной осью или сближенными двумя осями, установленными по центру тяжести.
Принцип действия системы динамической стабилизации для грузовых автомобилей
Системы динамической стабилизации для грузовиков в соответствии с требованиями можно поделить на две описанные ниже функциональные группы.
Стабилизация автомобиля в случае угрозы заноса или складывания автопоезда
Динамическая стабилизация грузового автомобиля вначале выполняется согласно тем же принципам, которые действуют для легковых автомобилей. Контроллер сравнивает текущее движение автомобиля с движением, заданным водителем, с учетом физических возможностей. Однако физическая модель движения в горизонтальной плоскости — для отдельного автомобиля характеризуется тремя степенями свободы (продольная, поперечная и вокруг вертикальной оси) — у сочлененного автомобиля также включает в себя угол сочленения между тягачом и прицепом (дополнительная степень свободы). Существуют и другие степени свободы для комбинаций с малогабаритными прицепами.
Для расчета движения автомобиля, задаваемого водителем, ЭБУ использует упрощенные физико-математические модели (одноколейную модель автомобиля) для определения номинальной скорости вращения тягача вокруг вертикальной оси. Встречающиеся в этих моделях параметры (характеристическая скорость автомобиля vch, колесная база l и передаточное отношение рулевого механизма il) адаптируются к поведению автомобиля во время эксплуатации с помощью особых адаптационных алгоритмов (например, фильтры Кальмана или рекурсивная оценка по методу наименьших квадратов). Адаптация параметров в реальном времени особенно важна для грузовиков из-за гораздо большего разнообразия вариантов и нагрузок, чем у легковых автомобилей. Параллельно с этим ESP вычисляет текущее движение автомобиля на основе измеренных значений скорости вращения вокруг вертикальной оси, бокового ускорения и скоростей колес. Значительное различие между движением автомобиля и движением, которое ожидает водитель, ведет к сбою управления, преобразуемому контроллером в корректирующий номинальный момент вращения вокруг вертикальной оси.
Номинальный момент вращения вокруг вертикальной оси
Уровень номинального момента вращения вокруг вертикальной оси у грузового автомобиля зависит от сбоя управления, текущей конфигурации автомобиля (колесная база, количество осей, эксплуатация с прицепом или без и т.д.) и состояния загрузки (масса, центр тяжести в линейном направлении и т.д.). Все эти параметры переменные, они непрерывно определяются системой ESP. Это достигается, к примеру, в загруженном состоянии с помощью оценочного алгоритма на основе сигналов системы управления двигателем (обороты и момент двигателя) и линейного движения автомобиля (скорости колес) для непрерывного определения текущей массы автомобиля.
На основании текущей ситуации движения номинальный момент вращения вокруг вертикальной оси соответствующим образом корректируется путем притормаживания отдельных колес прицепа. Это продемонстрировано на примере на рис. а и b » Принцип тормозящего вмешательства ESP у полуприцепов» для ярко выраженной избыточной и недостаточной поворачиваемости, соответственно.
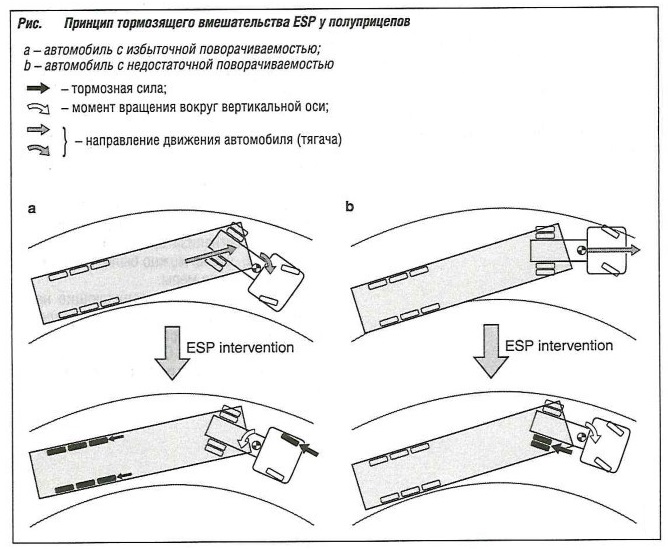
Наряду с этими ярко выраженными ситуациями существуют и другие критические динамические ситуации, в которых колеса притормаживаются в зависимости от желаемого стабилизирующего эффекта. В случае с более серьезной недостаточной поворачиваемостью весь автомобиль тормозит по каналам, аналогичным тем, что используются в расширенной системе управления недостаточной поворачиваемостью (EUC) у легковых автомобилей.
Из-за высокого центра тяжести заносы и складывания у грузовых автомобилей возникают главным образом при низких и средних коэффициентах сцепления шин с дорогой, когда уже на ранней стадии превышается предел статического трения шин. При высоких коэффициентах сцепления загруженные грузовики из-за высокого центра тяжести обычно начинают опрокидываться до достижения предельного статического трения шин.
Уменьшение риска опрокидывания
Порог опрокидывания (пороговое поперечное ускорение) автомобиля зависит не только от высоты центра тяжести, но и от систем шасси (подвеска, стабилизаторы, пружины и т.д.) и типа полезной нагрузки (фиксированная или движущаяся).
Причиной, вызывающей опрокидывание грузовика, помимо относительно низкого порога опрокидывания, является слишком высокая скорость при прохождении поворотов. ESP использует этот сценарий для уменьшения вероятности опрокидывания автомобиля. Как только автомобиль подходит к порогу опрокидывания, он тормозит посредством снижения крутящего момента двигателя и, при необходимости, задействования тормозов. Порог опрокидывания определяется здесь в зависимости от загрузки автомобиля и распределения нагрузки, при этом загруженное состояние автомобиля оценивается в реальном времени.
Определяемый порог опрокидывания корректируется в зависимости от ситуации движения. Таким образом, порог опрокидывания при высокой скорости, в очень динамичных ситуациях (например, при объезде препятствий) уменьшается, чтобы обеспечить раннее вмешательство системы. И наоборот, при очень медленных маневрах (например, прохождении крутых поворотов на горном серпантине), он повышается, чтобы предотвратить ненужное и деструктивное вмешательство ESP.
Определение порога опрокидывания основано на различных предположениях в отношении высоты центра тяжести и динамической реакции автопоезда с известным распределением нагрузки между осями. Это относится к большей части обычных автопоездов.
Для обеспечения динамической стабилизации даже в случае сильных отклонений от приемлемой ситуации (например, очень высокое расположение центра тяжести) ESP дополнительно обнаруживает возможный отрыв колес от поверхности дорогой на внутреннем радиусе поворота. Это достигается путем контроля колес на предмет неправдоподобной скорости вращения. При необходимости весь автопоезд интенсивно тормозится за счет вмешательства тормозной системы.
Отрыв колес прицепа на внутреннем радиусе поворота сигнализируется электронной тормозной системой прицепа (ELB) по шине CAN (SAE J 11992) путем активации контроллера ABS. У автопоездов с прицепами, оборудованными только системой ABS, выявление отрыва колес на внутреннем радиусе поворота осуществляется только у тягача.
Конструкция системы динамической стабилизации грузовых автомобилей
На европейском рынке электронная тормозная система ELB стала стандартом в области управления тормозами у крупнотоннажных грузовиков. ESP базируется на этой системе, добавляя в неё регулирование динамики движения. Для этого ESP использует возможности ELB по созданию изменяемых тормозных сил на каждом колесе независимо от действий водителя.
Очень разные общие условия для тормозных систем грузовиков в Северной Америке означают, что стандартно используются только системы ABS или ABS/TCS. Поэтому для этих и аналогичных регионов используется система ABS/TCS на базе ESP. В этом случае ESP использует метод, уже применяемый системой TCS на приводной оси для создания тормозных сил отдельно на каждом колесе независимо от водителя с помощью клапана TCS и следующих за ними клапанов ABS. Кроме того, для ESP на базе ABS инициируемое водителем торможение должно измеряться датчиками давления, что при вмешательстве ESP было бы невозможно из-за работы клапана TCS.
Системы датчиков системы динамической стабилизации
Как и в легковых автомобилях в качестве датчиков ESP в грузовиках используется комбинированный датчик скорости вращения вокруг вертикальной оси и поперечного ускорения и датчик угла поворота рулевого колеса. Каждый из этих датчиков соединяют контроллер с интерфейсом CAN для анализа и безопасной передачи измеренных данных.
Датчик угла поворота рулевого колоса обычно монтируется непосредственно под рулевым колесом. Сигнал датчика преобразуется в ЭБУ в угол поворота рулевого колеса.
Чтобы измерять поперечное смещение как можно ближе к центру тяжести тягача, комбинированный датчик скорости вращения вокруг вертикальной оси и поперечного ускорения обычно монтируется рядом с центром тяжести.
Хотя в грузовых автомобилях в основном используются те же датчики, что и в легковых, датчик скорости вращения вокруг вертикальной оси и поперечного ускорения должен иметь гораздо более прочную конструкцию, особенно рамы грузовика, чтобы выдерживать более жесткие условия эксплуатации.
Электронный блок управления
Алгоритмы ESP выполняются вместе с другими алгоритмами для управления тормозами (например, ABS и TCS) в блоке управления тормозами. Этот блок управления конструируется с помощью традиционной технологии печатных плат с мощными микроконтроллерами.
Шина CAN соединяет датчики ESP с блоком управления. Затем номинальные значения давления и скольжения колес по командам ESP реализуются соответствующей тормозной системой для каждого колеса и прицепа. В дополнение к этому тормозная система передает запрошенный крутящий момент двигателя по автомобильной шине CAN (обычно стандарта SAE J 1939) на ЭБУ двигателя для последующей его установки.
Кроме того, в тормозную систему передается необходимая информация от двигателя и тормоза-замедлителя по автомобильной шине CAN. Это в основном текущий и запрашиваемый крутящий момент и обороты двигателя, крутящий момент тормоза- замедлителя, скорость автомобиля и информация от различных выключателей и от имеющихся прицепов.
Функции обеспечения безопасности и контроля
Широкие возможности вмешательства ESP в характеристики управления автомобилем или автопоездом требуют наличия комплексной системы безопасности для обеспечения нормального функционирования системы. Это относится не только к базовой системе ELB или ABS/TCS, но и к дополнительным компонентам ESP, включая все датчики, ЭБУ и интерфейсы.
Используемые в ESP функции контроля в основном базируются на функциях, используемых в легковых автомобилях и адаптируются к характеристикам грузовиков.
Выполняется также взаимный контроль микроконтроллеров, распределенных по всей системе. Это означает, что в блоке управления тормозами имеется главный компьютер. Контролирующий компьютер, в основном выполняющий проверки правдоподобности и мелкие функциональные задачи. Кроме того, соответствующие алгоритмы постоянно проверяют память и прочие внутренние устройства компьютера для определения дефектов, которые могут возникнуть на ранней стадии.
Возникновение неисправностей
Возникновение неисправностей, в зависимости от их характера и значимости, приводит к различным последствиям — от выключения отдельных функциональных групп до полного перехода в резервный режим, когда управление тормозами осуществляется чисто пневматически. Это предотвращает неправдоподобные и потенциально опасные состояния при торможении из-за некорректных сигналов датчиков.
Возникновение неисправности сигнализируется водителю подходящими средствами (например, сигнализатором или сообщением на дисплее), чтобы можно было предпринять соответствующие меры.
Кроме того, любые возникающие неисправности получают в блоке управления отметку времени и хранятся в ЗУ неисправностей. Специалисты СТО могут проанализировать их с помощью подходящей диагностической системы.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: