
Наряду с тормозами и двигателем, используемыми системой динамической стабилизации (ESP), в шасси и приводе имеются другие исполнительные механизмы, целенаправленно влияющие на динамику движения. Функциональное сочетание исполнительных органов, относящихся к динамике движения, имеют разные названия у разных автопроизводителей и поставщиков: управление динамикой автомобиля (Vehicle Dynamics Management, VDM), интегрированное управление шасси (Integrated Chassis Control, ICC), интегрированное управление шасси (Integrated Chassis Management, ICM) и глобальное управление шасси (Global Chassis Control, GCC).

- Основные области применения
- Рекомендуемое усилие на рулевом колесе в зависимости от динамики
- Активная стабилизация рулевого управления на передней оси
- Активная стабилизация рулевого управления на задней оси
- Распределение крутящего момента в продольном направлении у автомобилей с приводом на четыре колеса.
- Распределение крутящего момента колес в поперечном направлении
- Замена межколесного распределения момента вмешательством тормозной системы и системы управления двигателем.
- Влияние на подруливающие свойства через стабилизацию поперечной устойчивости
- Влияние на подруливающие свойства через регулирование амортизации
- Архитектура системы
Основные области применения
Эти системы применяются главным образом для управления курсовой устойчивостью, маневренностью и уменьшением нагрузки на водителя, т.е. усилий, прикладываемых водителем для управления автомобилем.
Улучшение курсовой устойчивости
В критических ситуациях эти системы решают задачи по динамической стабилизации, обычно выполняемые самим водителем. Типичными примерами являются избыточная поворачиваемость или торможение на дорогах с разными коэффициентами сцепления с левой и с правой стороны (μ-разделение).
Повышение маневренности
Некоторые из этих функций улучшают реакцию поперечной динамики автомобиля на выполняемое водителем рулевое управление. Они делают автомобиль более маневренным, т.е. он более непосредственно и динамично реагирует на действия водителя.
Уменьшение усилий управления автомобилем
Улучшенная реакция автомобиля на движения рулевого колеса и автоматические стабилизирующие вмешательства снимают с водителя нагрузку, в частности, уменьшая усилия на рулевом колесе.
Рекомендуемое усилие на рулевом колесе в зависимости от динамики
Эта функция использует в качестве исполнительного механизма электроусилитель рулевого управления. На крутящий момент сервоусилителя рулевого управления накладывается дополнительный крутящий момент, зависящий от динамики движения.
Ограничение дополнительного крутящего момента рулевого управления
Дополнительный крутящий момент рулевого управления ограничивается, в зависимости от автомобиля, значениями около 3 Н-м, чтобы водитель мог в любой момент скорректировать рекомендуемое усилие на рулевом колесе. Из-за сравнительно малого дополнительного крутящего момента рулевого управления эта функция не воздействует непосредственно на движение автомобиля, а лишь косвенно — путем влияния на реакцию водителя.
Ситуации динамики движения
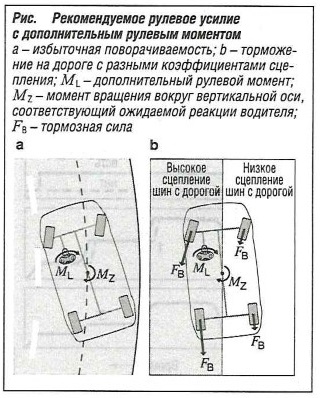 Функция рекомендуемого усилия на рулевом колесе активируется в различных ситуациях. В ситуации с избыточной поворачиваемостью создается крутящий момент в направлении, противоположном уводу (рис. а, «Рекомендуемое рулевое усилие с дополнительным рулевым моментом»). В случае недостаточной поворачиваемости эта функция мотивирует водителя не увеличивать угол поворота рулевого колеса, так как потенциал боковой силы на передних колесах уже исчерпан, и дальнейшее руление может даже уменьшить поперечную силу.
Функция рекомендуемого усилия на рулевом колесе активируется в различных ситуациях. В ситуации с избыточной поворачиваемостью создается крутящий момент в направлении, противоположном уводу (рис. а, «Рекомендуемое рулевое усилие с дополнительным рулевым моментом»). В случае недостаточной поворачиваемости эта функция мотивирует водителя не увеличивать угол поворота рулевого колеса, так как потенциал боковой силы на передних колесах уже исчерпан, и дальнейшее руление может даже уменьшить поперечную силу.
При торможении или разгоне на дорогах с разными коэффициентами сцепления с левой и правой стороны автомобиля (μ-разделение) происходит компенсирование вращения вокруг вертикальной оси путем выруливания (рис. Ь, «Рекомендуемое рулевое усилие с дополнительным рулевым моментом»).
Активная стабилизация рулевого управления на передней оси
Эта функция непосредственно вмешивается в движение автомобиля с помощью рулевого актюатора, обеспечивающего дополнительный угол поворота. В специальном редукторе устанавливаемый электродвигателем дополнительный угол поворота добавляется к углу, задаваемому водителем.
Эта функция работает, к примеру, в ситуации с избыточной поворачиваемостью. Система регулирования вращения вокруг вертикальной оси с автоматической коррекцией угла поворота возвращает избыточно высокий момент вращения вокруг вертикальной оси на заданный уровень.
При торможении на дорогах с разными коэффициентами сцепления эта функция компенсирует рыскание. Нагрузка на водителя значительно уменьшается при стабилизации автомобиля. Поскольку компенсация рыскания инициируется автоматически и происходит гораздо быстрее, чем руление среднестатистического водителя, то можно урезать меры по задержке увеличения момента вращения вокруг вертикальной оси, реализуемые системой ESP. Также сокращается тормозной путь.
Еще одно преимущество можно получить при недостаточной поворачиваемости и трогании с места на дорогах с разными коэффициентами сцепления.
Требования к системе датчиков
Из-за большой скорости позиционирования системы рулевого управления приоритетного Действия, сигналы датчиков должны контролироваться с малой задержкой сигнализации неисправностей. Это означает, что инерционная система датчиков должна иметь резервированную конструкцию.
Активная стабилизация рулевого управления на задней оси
В автомобилях с управляемой задней осью первичная функция регулирует угол поворота задней оси в зависимости от угла поворота рулевого колеса и скорости движения. На небольшой скорости задние колеса поворачиваются в противоход передним, что повышает маневренность.
На высокой скорости задние колеса поворачиваются в одном направлении с передними. Таким образом, при объезде препятствий рыскание происходит менее интенсивно. Это значительно повышает курсовую устойчивость.
Ситуации со сложной динамикой движения
Соответствующие функции действуют в ситуациях, схожих с активными вмешательствами в рулевое управление передней оси. Эффективность вмешательств в рулевое управление ключевым образом зависит от текущего использования потенциала поперечных сил на задних колесах.
При торможении на дорогах с разными коэффициентами сцепления для подавления рыскания необходимы вмешательства с большими углами вследствие уменьшения нагрузки на заднюю ось. С другой стороны, торможение может иметь место без значительного изменения угла.
Требования к системе датчиков
Функции для рулевого управления задней оси тоже требуют инерционной системы датчиков с резервированием, так как скорость позиционирования рулевого исполнительного механизма на задней оси сравнима с приоритетным рулевым управлением.
Распределение крутящего момента в продольном направлении у автомобилей с приводом на четыре колеса
В автомобилях с приводом на четыре колеса блокировка межосевого дифференциала или перенос крутящего момента между осями в рамках их базовой функции улучшают тяговое усилие и, соответственно, разгонные характеристики автомобиля, при этом тяговое усилие передается колесами на обеих осях.
Ситуации со сложной динамикой движения
В ситуациях, при которых коэффициент сцепления с дорогой используется не полностью, можно изменять подруливающие свойства, смещая тяговые усилия между передней и задней осями. Чем больше тяговое усилие передается на ось, тем сильнее ослабляется потенциал поперечной силы на колесах этой оси. Смещение тягового усилия на переднюю ось повышает тенденцию к недостаточной поворачиваемости, а на заднюю ось — понижает ее (см. «Распределение крутящего момента»). Через динамическое управление распределением крутящего момента можно повысить поперечную динамику, при этом у автомобиля не появится тенденция к избыточной поворачиваемости.
Распределение крутящего момента колес в поперечном направлении
Функции на основе векторизации крутящего момента значительно способствуют повышению маневренности. Исполнительный механизм позволяет произвольно смещать крутящий момент на оси с одного колеса на другое. Таким образом, общая вращающая сила, за исключением потерь на трение, не уменьшается — это означает, что это вмешательство практически нейтрально по отношению к скорости движения.
Ситуации со сложной динамикой движения
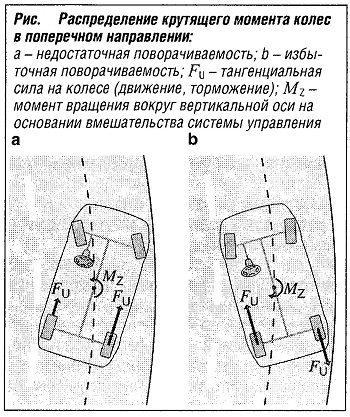 При недостаточной поворачиваемости крутящий момент на колесе, движущемся по внешнему радиусу, увеличивается, а на колесе, движущемся по внутреннему радиусу — уменьшается. Таким образом, на автомобиль воздействует дополнительный момент вращения вокруг вертикальной оси (рис. а, «Распределение крутящего момента колес в поперечном направлении»). Тенденция к недостаточной поворачиваемости снижается; поперечная маневренность повышается.
При недостаточной поворачиваемости крутящий момент на колесе, движущемся по внешнему радиусу, увеличивается, а на колесе, движущемся по внутреннему радиусу — уменьшается. Таким образом, на автомобиль воздействует дополнительный момент вращения вокруг вертикальной оси (рис. а, «Распределение крутящего момента колес в поперечном направлении»). Тенденция к недостаточной поворачиваемости снижается; поперечная маневренность повышается.
При ускорении на дорогах с разными коэффициентами сцепления приводной момент направляется на колесо с большим коэффициентом сцепления. Одновременно система управления тяговым усилием притормаживает колесо с низким коэффициентом сцепления. Это повышает среднее ускорение на дорогах с разными коэффициентами сцепления.
Даже в ситуации с избыточной поворачиваемостью притормаживание частично заменяется межколесным перераспределением крутящего момента (рис. Ь, «Распределение крутящего момента колес в поперечном направлении»). Таким образом, потерю скорости можно уменьшить путем притормаживающего вмешательства ESP. В критических ситуациях с избыточной поворачиваемостью все равно происходит притормаживание, так как в этом случае потеря скорости желательна — для смягчения ситуации.
Замена межколесного распределения момента вмешательством тормозной системы и системы управления двигателем
Вмешательства при недостаточной поворачиваемости на основе векторизации момента можно заменять торможением колес, движущихся по внутреннему радиусу поворота. При этом увеличивается крутящий момент двигателя, компенсируя одностороннее торможение. В результате возникает эффект, похожий на вмешательство при недостаточной поворачиваемости путем векторизации момента. Для этого нужен лишь гидравлический модулятор с длительным сроком службы и невысоким уровнем шума вместо дополнительного органа, перераспределяющего момент.
Влияние на подруливающие свойства через стабилизацию поперечной устойчивости
 В соответствии со своей ориентированной на комфорт базовой функцией, системы стабилизации поперечной устойчивости служат для компенсирования крена в поворотах.
В соответствии со своей ориентированной на комфорт базовой функцией, системы стабилизации поперечной устойчивости служат для компенсирования крена в поворотах.
Когда система стабилизации поперечной устойчивости имеет двухканальную конструкцию с раздельной активацией исполнительных органов на передней и задней осях, существует дополнительная возможность влияния на подруливающие свойства. Крутящий момент, компенсирующий крены — в рамках работы отдельных каналов — можно активно перераспределять между передней и задней осями. В результате изменяются силы, воздействующие на колеса.
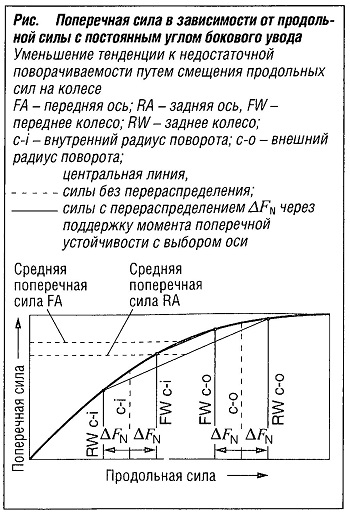
Влияние на подруливающие свойства основано на пропорционально снижаемом увеличении поперечных сил под действием продольных сил (рис. «Поперечная сила в зависимости от продольной силы с постоянным углом бокового увода» ). Когда момент поперечной устойчивости в значительной степени поддерживается на задней оси, сильно увеличивается продольная сила на заднем колесе, движущемся по внешнему радиусу поворота; но соответствующая боковая сила в пропорциональном отношении увеличивается лишь частично. Поперечная сила на задней оси ослабевает, и тенденция к недостаточной поворачиваемости снижается. И наоборот, тенденция к недостаточной поворачиваемости повышается, когда момент поперечной устойчивости в значительной степени поддерживается на передней оси.
Влияние на подруливающие свойства через регулирование амортизации
Использование амортизаторов с регулируемой жесткостью для адаптивного смягчения вертикального перемещения кузова сейчас очень распространено. Продольное и поперечное раскачивание, вызываемые действиями водителя — торможением и рулевым управлением или дефектами дорожного покрытия, а также вертикальные перемещения, вызываемые дефектами дорожного покрытия, можно ощутимо уменьшить.
В ограниченной степени можно также влиять на подруливающие свойства. Механизм действия соответствует влиянию на подруливающие свойства через стабилизацию поперечной устойчивости. Однако эта функция имеет лишь кратковременный эффект во время поперечной раскачки кузова, поскольку необходимым условием для амортизирующих сил является перемещение амортизатора. Амортизирующие силы можно модулировать путем изменения жесткости амортизаторов так, чтобы силы, воздействующие на колеса, можно было полуактивно распределять, как было описано выше.
Архитектура системы
Распределение функций между ЭБУ
Исполнительные органы в шасси и приводе обычно активируются не только функциями интегрированных систем управления динамикой, но и в первую очередь базовыми функциями, очень тесно связанными с исполнительным механизмом. Примерами таких базовых функций могут служить «помощники» в системах с электроусилителем рулевого управления или переменное передаточное отношение в системе приоритетного руления.
Основные функции характеризуются умеренным объединением в сеть с другими автомобильными системами. Из-за своей тесной связи с исполнительным механизмом они обычно встраиваются в соответствующий ЭБУ, который также активирует исполнительный орган и контролирует его.
С другой стороны, функции интегрированных систем управления динамикой очень тесно связаны между собой, в частности, с ESP и другими системами управления шасси. Они вычисляют номинальное значение динамики для исполнительного механизма, передаваемое по шине данных на ЭБУ. Организация доступа к общей шине номинальных значений базовых функций выполняется в ЭБУ.
ЭБУ для управления динамикой, или центральный ЭБУ функциональной области «шасси» подходит для использования в качестве платформы для функций интегрированных систем управления динамикой (рис. «Схема системы для реализации функций интегрированного управления динамикой движения (VDM)» ).

Взаимодействие различных функций
В автомобилях устанавливают все больше различных функций и исполнительных механизмов. Это требует функциональной структуры, гарантирующей хорошее взаимодействие отдельных функций и, прежде всего, предотвращающей взаимные помехи.
Прежняя тенденция, когда у каждого исполнительного механизма был свой контроллер, исчерпала себя. Однако полное объединение всех алгоритмов в центральном контроллере ограничивает гибкость распределенной разработки и использования ресурсов ЭБУ.
Более обещающим компромиссом является объединение всех контроллеров, использующих принцип связанного позиционирования, поскольку вмешательства по принципу связанного позиционирования требуют особенно интенсивной координации.
Принципы позиционирования и системы позиционирования:
- Крутящий момент на колесе: система управления динамикой, управляемая блокировка дифференциала, векторизация момента;
- Угол поворота: приоритетное рулевое управление (передняя ось) и рулевое управление на задней оси;
- Продольная сила: стабилизация поперечной устойчивости, регулировка жесткости амортизаторов.
Рекомендуемое усилие на руле играет особую роль, так как не воздействует непосредственно на движение автомобиля. Оно должно соотноситься с функциями приоритетного рулевого управления в плане воздействия, оказываемого на водителя.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: