
Мы уже поговорили о динамических характеристиках легкового автомобиля. А как ведет себя на дороге грузовой автомобиль? Ведь многоосной машине гораздо труднее справляться с действующими на нее нагрузками при различных режимах движения. Вот о том, что представляют специальные динамические характеристики грузовых автомобилей, мы и поговорим в этой статье.

Способность грузового автомобиля к восстановлению прямолинейного движения
Целью является достижение не создающей проблем недостаточной поворачиваемости автомобиля. Поведение автомобиля в стационарных условиях движения определяется его способностью к восстановлению прямолинейного движения. В свою очередь эта способность определяется:
- Механическими и гидравлическими параметрами рулевого механизма;
- Жесткостью и геометрией рулевого механизма;
- Эластокинематикой передней и задней осей;
- Жесткостью рамы;
- Стабилизацией крена передней и задней осей.
 Внешние воздействия, такие как неровности дороги или боковой ветер, не должны оказывать значительного влияния на движение автомобиля. Эластокинематическая конструкция осей служит для сведения влияния этих внешних воздействий к минимуму. Целью является минимизация перемещений рулевого механизма под действием сжатия и обратного отскока элементов подвески, а также в результате торможения. Кинематические точки системы рулевого управления или точки присоединения рессор к раме в конфигурации эластокинематики действуют как установочные рычаги. Для конфигурирования эластокинематики используются геометрически нелинейные программы анализа методом конечных элементов. Конфигурация проверяется на специальных эластокинематических испытательных стендах.
Внешние воздействия, такие как неровности дороги или боковой ветер, не должны оказывать значительного влияния на движение автомобиля. Эластокинематическая конструкция осей служит для сведения влияния этих внешних воздействий к минимуму. Целью является минимизация перемещений рулевого механизма под действием сжатия и обратного отскока элементов подвески, а также в результате торможения. Кинематические точки системы рулевого управления или точки присоединения рессор к раме в конфигурации эластокинематики действуют как установочные рычаги. Для конфигурирования эластокинематики используются геометрически нелинейные программы анализа методом конечных элементов. Конфигурация проверяется на специальных эластокинематических испытательных стендах.
Тяжелые грузовые автомобили с пневматической подвеской обычно имеют сплошные или неразрезные мосты. Конструкция таких мостов в общем случае обеспечивает практически неизменную способность к восстановлению прямолинейного движения при всех условиях загрузки автомобиля, поскольку различий в этом отношении между «ненагруженным» и «нагруженным» состояниями не существует. На сегодняшний день концепции управления мостами, подразумевающие независимый контроль колес, были реализованы только на легких автофургонах и автобусах.
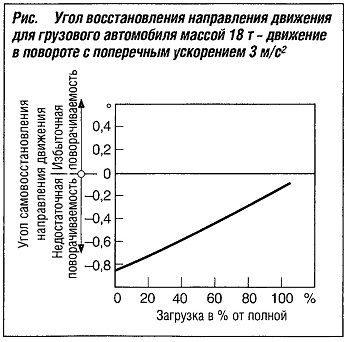
Нагрузка на колеса задней оси значительно изменяется в зависимости от того, находится автомобиль в «ненагруженном» или «нагруженном» состоянии. При этом автомобиль реагирует на уменьшение нагрузки более явно выраженной недостаточной поворачиваемостью (см. рис. «Угол восстановления направления движения для грузового автомобиля» ).
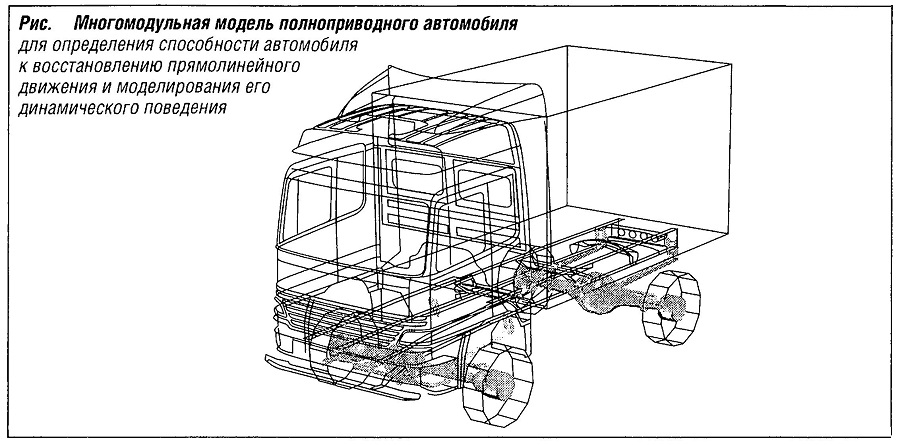
На трехосных автомобилях с колесной формулой 6 х 4 (шесть колес, четыре из которых ведущие) стабилизация прямолинейного движения двух неуправляемых осей задней тележки создает ограничивающий момент вокруг вертикальной оси автомобиля за счет разных углов увода первой и второй задних осей. Дополнительные направляющие усилия при повороте, требуемые для колес передней и задних осей при малых скоростях, определяются следующим образом (см. рис.»Многомодульная модель полноприводного автомобиля« ).
Направляющие усилия при повороте с учетом ограничений для малых углов а:
Fs1 = Fs2-Fs3,
где:
Fs2 = сР2n2а2,
Fs3 = ср3n3а3.
Углы увода:
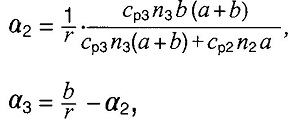
где:
ср2 и срз — устойчивость к скольжению, определяемая свойствами шин;
n2 и n3 — количество шин на одной оси.
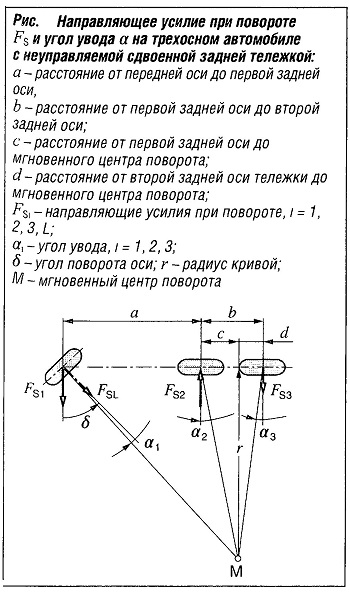
Прочие обозначения см. на рис. «Направляющее усилие при повороте и угол увода на трехосном автомобиле с неуправляемой сдвоенной задней тележкой».
Сопротивление грузового автомобиля опрокидыванию
 При увеличении габаритной высоты автомобиля появляется опасность его опрокидывания при повороте. Таким же образом, как параметры общего динамического поведения автомобиля, предельные параметры опрокидывания определяются при помощи многомодульной модели автомобиля (многомодульная система, см. рис. «Многомодульная модель полноприводного автомобиля» ). В процессе моделирования исследуются различные стационарные и нестационарные маневры, такие как установившееся криволинейное движение и двойное перестроение из ряда в ряд. Достижимое боковое ускорение b при пределе опрокидывания во время установившегося криволинейного движения составляет для легких автофургонов 6-8 м/с2, для грузовых автомобилей 4-6 м/с2 и для двухэтажных автобусов 3 м/с2.
При увеличении габаритной высоты автомобиля появляется опасность его опрокидывания при повороте. Таким же образом, как параметры общего динамического поведения автомобиля, предельные параметры опрокидывания определяются при помощи многомодульной модели автомобиля (многомодульная система, см. рис. «Многомодульная модель полноприводного автомобиля» ). В процессе моделирования исследуются различные стационарные и нестационарные маневры, такие как установившееся криволинейное движение и двойное перестроение из ряда в ряд. Достижимое боковое ускорение b при пределе опрокидывания во время установившегося криволинейного движения составляет для легких автофургонов 6-8 м/с2, для грузовых автомобилей 4-6 м/с2 и для двухэтажных автобусов 3 м/с2.
Все более широкое применение систем стабилизации курсовой устойчивости (ESP), определяющих величину и распределение нагрузки, также и на коммерческих автомобилях может значительно снизить риск опрокидывания.
Требования к габаритной ширине грузового автомобиля
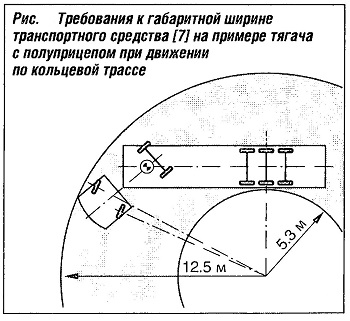 При движении автомобиля или автопоезда повороте габаритная ширина становится больше, чем при движении по прямой. Что касается выбора маневров при движении, необходимо определить радиус поворота автомобиля, приемлемый для заданных условий (например, узких улиц в плотно застроенных районах) и соответствующий принятым нормам безопасности (см. рис. «Требования к габаритной ширине транспортного средства на примере тягача с полуприцепом при движении по кольцевой трассе» ). Это определяется при помощи многомодульной модели автомобиля.
При движении автомобиля или автопоезда повороте габаритная ширина становится больше, чем при движении по прямой. Что касается выбора маневров при движении, необходимо определить радиус поворота автомобиля, приемлемый для заданных условий (например, узких улиц в плотно застроенных районах) и соответствующий принятым нормам безопасности (см. рис. «Требования к габаритной ширине транспортного средства на примере тягача с полуприцепом при движении по кольцевой трассе» ). Это определяется при помощи многомодульной модели автомобиля.
Характеристики управляемости грузового автомобиля
Объективный анализ поведения автомобиля осуществляется по результатам различных испытаний, таких как испытание в режиме установившегося криволинейного движения, «шаговое воздействие», «испытание в колебательном режиме», «одинарное и двойное перестроение», «синусоидальное входное воздействие и частотный отклик» и «торможение при прямолинейном движении и движении по кривой».
Динамические боковые реакции комбинаций тягачей и прицепов (например, тягача с полуприцепом, грузового автомобиля с прицепом) в общем случае отличаются от реакций жестких автомобилей. Особенную важность представляет распределение нагрузок между тягачом и прицепом или полуприцепом, а также конструкция и геометрия тяговосцепного устройства.
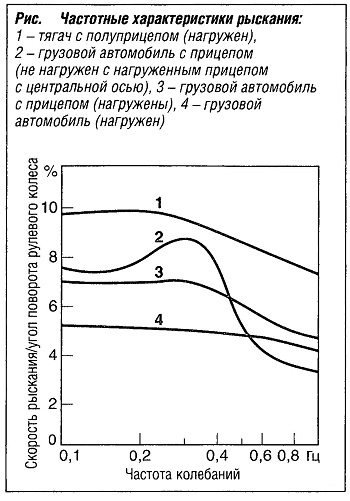 Причинами нарушения стабильности прямолинейного движения в виде рыскания автомобиля могут быть быстрые манипуляции рулем во время маневров уклонения, порывы бокового ветра, неровности дороги, препятствия с какой-либо одной стороны и поперечный уклон дороги. На устойчивых автомобилях рыскание, вызванное такими воздействиями, должно быстро затухать. Эти колебательные процессы можно оценить при помощи частотных характеристик рыскания (см. рис. «Частотные характеристики рыскания» ). Частотные характеристики рыскания для различных комбинаций тягачей и прицепов демонстрируют, что в самом неблагоприятном случае (не нагруженный тягач с нагруженным прицепом с центральной осью, кривая 2 на рис. «Частотные характеристики рыскания» ) имеет место возрастание тенденции к резонансу. Вождение такого автопоезда требует высокой квалификации и осмотрительности.
Причинами нарушения стабильности прямолинейного движения в виде рыскания автомобиля могут быть быстрые манипуляции рулем во время маневров уклонения, порывы бокового ветра, неровности дороги, препятствия с какой-либо одной стороны и поперечный уклон дороги. На устойчивых автомобилях рыскание, вызванное такими воздействиями, должно быстро затухать. Эти колебательные процессы можно оценить при помощи частотных характеристик рыскания (см. рис. «Частотные характеристики рыскания» ). Частотные характеристики рыскания для различных комбинаций тягачей и прицепов демонстрируют, что в самом неблагоприятном случае (не нагруженный тягач с нагруженным прицепом с центральной осью, кривая 2 на рис. «Частотные характеристики рыскания» ) имеет место возрастание тенденции к резонансу. Вождение такого автопоезда требует высокой квалификации и осмотрительности.
При торможении автопоездов в составе седельных тягачей в опасных ситуациях возможно их складывание. Этот процесс возникает на скользкой дороге (при низком значении коэффициента трения μ), когда из-за повышенного тормозного усилия, прикладываемого к задней оси тягача, уменьшается поперечная реакция или при чрезмерном увеличении момента ц, стремящегося развернуть автопоезд. Установка электронной системы динамической стабилизации (ESP) — это наиболее эффективный способ предотвращения складывания.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: