Датчики положения регистрируют перемещение в одном или нескольких направлениях и угловые положения (поступательное и вращательное движения) самых разнообразных типов и диапазонов — одним словом, все, что можно измерить в метрах и градусах. Сюда, например, относятся: зазоры, расстояния, перемещения, уровни заполнения и даже незначительные удлинения. Вот о том, какими бывают датчики положения мы и поговорим в этой статье.

В этой области применения специалисты давно стремились перейти к датчикам ближней локации и бесконтактным датчикам. Такие датчики не подвержены износу и поэтому имеют длительный срок службы и более надежны. Хотя необходимость экономить часто вынуждает автопроизводителей сохранять «щеточный» принцип датчиков, и такие датчики работают все еще достаточно эффективно во многих областях.
Что измеряют датчики положения
Непосредственно измеряемые переменные:
- Положение дроссельной заслонки;
- Положения педали управления подачей топлива;
- Положения сидений и зеркал заднего вида;
- Ход и положение тяги механизма управления;
- Уровень топлива;
- Ход сервоблока муфты сцепления;
- Положение педали тормоза;
- Угол поворота рулевого колеса;
- Угол наклона;
- Дальние расстояния: автомобиль — автомобиль или автомобиль — препятствие;
- Короткие расстояния;
- Курс.
Косвенно измеряемые переменные:
- Угол отклонения пластины датчика (расход);
- Перемещение подпружиненной массы (ускорение);
- Перемещение диафрагмы (давление);
- Статический прогиб подвески (регулировка фар);
- Угол закручивания торсиона (момент);
- Отклонение пружины (масса переднего пассажира).
На практике инкрементные датчики часто также называют датчиками углового положения, даже когда они используются для измерения скорости вращения. В действительности же они не являются датчиками углового положения. Поскольку приращение (шаг увеличения параметра), измеряемое этими датчиками для определения угла отклонения, сначала должно подсчитываться с правильным знаком (т.е. складываться), существует возможность постоянных помех.
Потенциометры со скользящими (подвижными) контактами
Щеточный потенциометр измеряет линейные и угловые перемещения благодаря пропорциональной связи между длиной проволоки или дорожки и ее электрическим сопротивлением (рис. «Потенциометр со скользящим контактом» ). 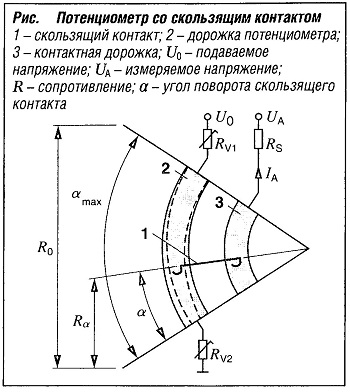 В настоящее время это самый дешевый датчик линейного/углового перемещения.
В настоящее время это самый дешевый датчик линейного/углового перемещения.
Напряжение обычно подается на измерительную дорожку через последовательные резисторы малого сопротивления Rv (их также можно использовать для калибровки нулевой точки и крутизны кривой). Форма контура по всей ширине измерительной дорожки (включая форму отдельных секций) влияет на форму характеристической кривой.
Стандартное подключение подвижного контакта выполняется с помощью второй контактной дорожки, состоящей из того же материала, нанесенного на проводящую подложку. Во избежание износа и погрешности измерения ток в зоне контакта минимизи руют (IА < 1 мА), а устройство в целом защищается от пыли.
Примеры применения:
- Датчик углового положения дроссельной заслонки (M-Motronic);
- Датчик углового положения дроссельной заслонки
- В дросселе (ME- и Dl-Motronic);
- Датчик положения педали газа;
- Датчик уровня топлива.
Магнитно-индуктивные датчики
Из всех датчиков, выполняющих бесконтактное измерение положения, магнитные датчики особенно нечувствительны к помехам и надежны. Это особенно относится к датчикам, зависящим от переменного тока, т.е. магнитно-индуктивным датчикам. По сравнению с микромеханическим датчиком, для необходимой здесь конфигурации катушки требуется гораздо больше места. Поэтому возможностей для резервной конструкции (параллельного измерения) здесь нет. Кроме того, катушечное контактирование менее благоприятно с экономической точки зрения и с точки зрения надежности.
Из множества прижившихся принципов этого типа на практике в автомобилях используются чаще всего два (электроиндуктивные датчики и короткозамыкающие кольцевые датчики), очень похожие по принципу работы. Однако для новых разработок больше не использует макромеханические версии автомобильных датчиков. Вместо этого инженеры обратились к очень экономичной модели компании Hella, принцип действия которой похож на индуктосин.
Датчики с закорачивающим кольцом
В отличие от электроиндуктивных датчиков, катушка датчика с закорачивающим кольцом имеет прямой или изогнутый U- или Е-образный магнитомягкий, (обычно) пластинчатый железный сердечник (рис. «Принцип измерения датчика с закорачивающим кольцом» ). 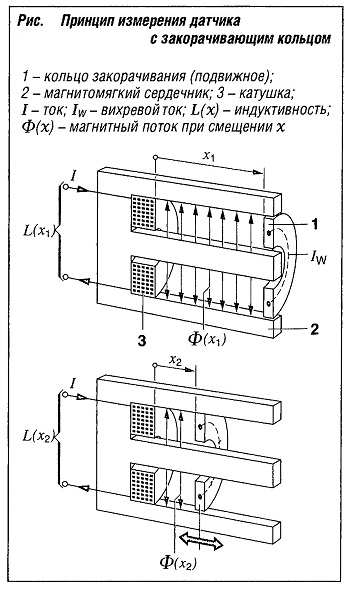 Движущееся «закорачивающее кольцо» изготавливается из материала с высокой проводимостью — меди или алюминия, расположено вокруг одной или всех секций сердечника. Из-за железного сердечника индуктивность таких датчиков гораздо выше, чем у не содержащих железа электроиндуктивных датчиков, а из-за очень концентрированного наведения магнитного потока железным сердечником — гораздо больший диапазон измерения. С типичным значением Lmax /Lmin = 4 диапазон измерения относительно высок. Это означает, что эти датчики хорошо работают на низких частотах, и им не обязательно требуется локально размещаемая сигнальная электроника, т.е. непосредственно на самом датчике. Железный сердечник также хорошо защищает измерительное пространство между секциями сердечника от внешних паразитных полей.
Движущееся «закорачивающее кольцо» изготавливается из материала с высокой проводимостью — меди или алюминия, расположено вокруг одной или всех секций сердечника. Из-за железного сердечника индуктивность таких датчиков гораздо выше, чем у не содержащих железа электроиндуктивных датчиков, а из-за очень концентрированного наведения магнитного потока железным сердечником — гораздо больший диапазон измерения. С типичным значением Lmax /Lmin = 4 диапазон измерения относительно высок. Это означает, что эти датчики хорошо работают на низких частотах, и им не обязательно требуется локально размещаемая сигнальная электроника, т.е. непосредственно на самом датчике. Железный сердечник также хорошо защищает измерительное пространство между секциями сердечника от внешних паразитных полей.
Переменное поле, создаваемое внутри и вокруг железного сердечника током катушки I , не способно пройти через закорачивающее кольцо, так как электроиндуктивные токи в кольце уменьшают его практически до нуля. Поэтому электроиндуктивные токи в закорачивающем кольце ограничивают — как «магнитный изолятор» — расширение магнитного потока Ф в пространство между катушкой и кольцом, делая его зависимым от положения x закорачивающего кольца (Ф = Ф(х)).
Индуктивность определяется по формуле:
L = Ф(x)/I
Таким образом, положение x закорачивающего кольца также непосредственно влияет на индуктивность L катушки. Зависимость L = L(x) оптимально линейна в широком диапазоне. Поскольку движущаяся масса относительно мала, для целей измерения можно использовать почти всю длину датчика. Механически близкое наведение закорачивающего кольца здесь не требуется.
Масса движущегося закорачивающего кольца очень мала. Величина зазора между катушкой и сердечником влияет на форму кривой: уменьшение зазора в сторону предела диапазона измерений еще больше улучшает уже хорошую линейность. В зависимости от материала и формы рабочий диапазон лежит в интервале 5-50 кГц. Этот датчик можно также использовать в очень жестких условиях, например, на ТНВД.
Из-за работы с переменным током сердечники ламинируются, например, производится ламинирование NiFe толщиной 0,2 мм. Для обеспечения необходимого механического соединения пластин (устойчивость к ускорению) они не просто традиционным образом склеиваются, но и дополнительно «упаковываются». Для этого на пластинах в определенных точках делаются кнопкообразные наплавки, которыми их можно соединить с внутренней стороны перед мягким отжигом (как в конструкторе LEGO) без значительного нарушения необходимой электрической изоляции от пластины к пластине.
Полудифференциальные датчики с закорачивающим кольцом
 Полудифференциальные датчики с движущимся измерительным и фиксированным опорным закорачивающими кольцами (рис. «Схема и принцип работы полудифференциального датчика с закорачивающим кольцом» ) отвечают требованиям к высокой точности. С их помощью проводятся измерения, которые действуют подобно:
Полудифференциальные датчики с движущимся измерительным и фиксированным опорным закорачивающими кольцами (рис. «Схема и принцип работы полудифференциального датчика с закорачивающим кольцом» ) отвечают требованиям к высокой точности. С их помощью проводятся измерения, которые действуют подобно:
- Индуктивным делителям напряжения (обработка данных типа L1/L2 или (L1 — L2)/(L1 + L2);
- Либо элементам-определителям частоты в генераторной схеме, создающим сигнал, пропорциональный частоте (хорошие характеристики помехозащищенности, простое цифровое преобразование).
Области применения:
- Датчики положения золотника для ТНВД;
- Датчики углового положения в исполнительных механизмах подачи топлива в насосах распределенного впрыска дизельного топлива.
Датчики с вращающимися переменными полями
Двух- или многополюсные структуры с переменными полями могут быть организованы в круге или линейно с катушками, на которые подается переменный ток угловой частоты ω, или катушкообразными конфигурациями, такими как меандровые структуры с токоведущими дорожками. По сравнению с обычно фиксированным набором приемных катушек с одинаковым полюсным делением эти полюсные структуры с фиксированным полюсным делением могут смещаться движением измеряемой системы — будь то вращательное или поступательное движение. Здесь амплитуды сигналов приемника U1 U2, U3,… изменяются синусоидально с движением. Если приемные катушки смещаются относительно друг друга на определенную часть полюсного деления T. например, T/4 или Т/З, синусоидальная форма сдвигается в каждом случае на соответствующий угол, например, на 90° или 120°. После выпрямления измеряемый угол поворота φ можно вычислить с высокой точностью на основании этих напряжений. Этот режим работы датчиков в классической метрологии называют синхронизацией, синусно-косинусным преобразованием или индуктосином, и предпочтительно эти датчики используются, как датчики углового положения.
Датчик Hella
Датчик углового положения, разработанный компанией Hella, больше всего напоминает индуктосин. На рис. «Датчик Hella» для примера показан датчик с шестиполюсной структурой (n = 6), что в электрическом выражении преобразует угол вращения φ = 60° в фазовое смещение амплитуд сигнала на угол а = 360°. 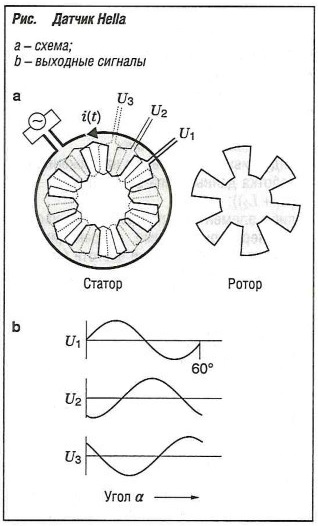 Все необходимые структуры с токоведущими дорожками, по крайней мере, в случае с фиксированной частью (статором), расположены на многослойной плате. Роторная часть, при необходимости, тоже может быть выполнена по технологии тиснения либо в самонесущем исполнении, либо на пластмассовых опорах (горячее тиснение).
Все необходимые структуры с токоведущими дорожками, по крайней мере, в случае с фиксированной частью (статором), расположены на многослойной плате. Роторная часть, при необходимости, тоже может быть выполнена по технологии тиснения либо в самонесущем исполнении, либо на пластмассовых опорах (горячее тиснение).
На статоре размещается круговой контур с токоведущими дорожками, который, независимо от угла поворота, индуцирует при рабочей частоте 20 МГц вихревой ток в автономном меандровом контуре с примерно таким же внешним диаметром на роторе. Как и контур возбуждения, этот вихревой ток создает вторичное магнитное поле, перекрывающее поле возбуждения настолько, что пытается погасить его. Если бы на роторе вместо меандра была только круговая токоведущая дорожка, конгруэнтная контуру статора, это просто максимально заглушило бы первичное поле. Однако меандровая структура создает результирующее многополюсное поле, которое может вращаться с ротором, и суммарный магнитный поток которого, естественно, тоже практически равен нулю.
Это многополюсное переменное поле считывается концентрическими приемными катушками или меандрами идентичной формы, также находящимися на статоре. Эти катушки или меандры смещаются в пределах полюсного деления, например, 60° в каждом случае на 1/3, т.е. электрически в амплитуде сигнала на 120° (рис. «Датчик Hella«). Однако приемные катушки распределяются по всем п парам полюсов (последовательное соединение), используя все полюсные поля сразу.
На рис. «Датчик Hella с интерфейсом μС» показаны приемные катушки, соединенные звездой. Для определения электрического фазового угла а или механического угла поворота φ сигналы катушек проходят к специализированной интегральной схеме (ASIC), выполняющей необходимые выпрямление, отбор и формирование соотношения. Один ее вариант — ASIC 1 — принимает необходимые цифровые управляющие сигналы от расположенного рядом микроконтроллера. Но и другой ее вариант — ASIC 2 — тоже может управлять датчиком совершенно независимо (автономно). Интегральные схемы ASIC также позволяют регулировать механические и электрические допуски в производстве, на конечной стадии.
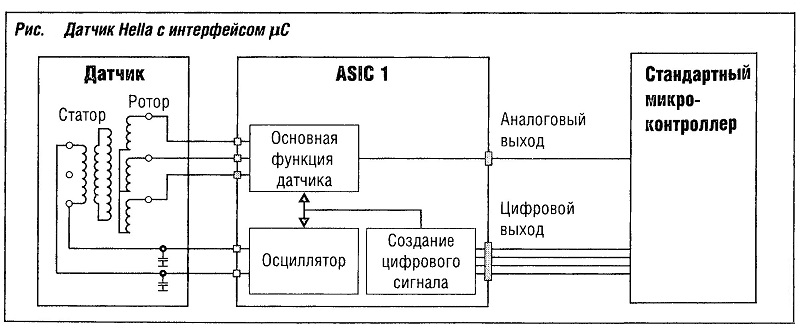
Для областей применения с повышенными требованиями к безопасности можно также создать дублированную систему — с двумя изолированными путями прохождения сигнала и двумя ASIC. Датчик может принимать и «открытую» форму, как датчик хода. Таким образом, датчик можно использовать во многих узлах автомобиля (например, для измерения угла открытия дроссельной заслонки, положения рычага автоматической коробки передач, положения фар в системе регулировки фар).
Магнитостатические датчики
Магнитостатические датчики измеряют постоянное магнитное поле. В отличие от магнитно-индуктивных (катушечных) датчиков, они гораздо лучше подходят для миниатюризации и могут изготавливаться при разумных затратах по микросистемным технологиям. Поскольку постоянное магнитное поле может легко проникнуть через пластмассовые и неферромагнитные металлические стенки корпусов, преимущество магнитостатических датчиков состоит в том, что чувствительную, обычно фиксированную часть, можно хорошо закапсулировать и защитить от вращающейся части и от окружающей среды, обычно это постоянный магнит или магнитомягкий проводящий элемент. Прежде всего используются гальванометрические эффекты (эффекты Холла и Гаусса, рис. «Гальваномагнитный эффект» ), а также анизотропические магниторезистивные (AMR) металлические тонкопленочные элементы.
Гальваномагнитный эффект
В таких датчиках используются прежде всего тонкие полупроводниковые пластинки для оценки эффекта Холла. 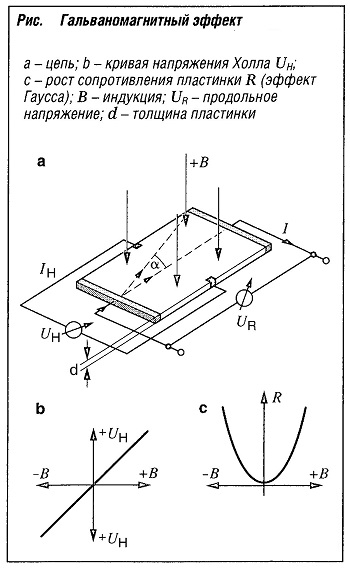 Если через такую токонесущую пластинку перпендикулярно к ее плоскости проникнет магнитная индукция В, то носители заряда будут отклонены силой Лоренца, действующей поперечно к полю и току I, на угол а от их прямого пути. Таким образом, возможен отбор напряжения UH, пропорционального полю В и току I поперечно направлению тока между двумя противоположными точками пластинки (эффект Холла):
Если через такую токонесущую пластинку перпендикулярно к ее плоскости проникнет магнитная индукция В, то носители заряда будут отклонены силой Лоренца, действующей поперечно к полю и току I, на угол а от их прямого пути. Таким образом, возможен отбор напряжения UH, пропорционального полю В и току I поперечно направлению тока между двумя противоположными точками пластинки (эффект Холла):
UH = RH I B/d,
где:
RH — коэффициент Холла;
d — толщина пластинки.
В то же время последовательное сопротивление пластинки увеличивается независимо от направления поля, согласно примерно параболической кривой (эффект Гаусса, магниторезистивный эффект). Коэффициент RH, важнейший для измерительной чувствительности пластинки, в случае с кремнием сравнительно мал; но поскольку толщину пластинки d можно сделать крайне малой с помощью технологий диффузии, то напряжение Холла UH снова принимает технически приемлемое значение. Когда в качестве основного материала используется кремний, в пластинку можно встроить контур кондиционирования сигнала, поэтому датчики, использующие эти принципы очень дешевы в изготовлении.
Однако в плане чувствительности измерений, температурного коэффициента и диапазона температур кремний — далеко не лучший полупроводниковый материал для датчиков Холла. Полупроводники «III-V», такие как арсенид галлия или антимонид индия, имеют гораздо лучшие свойства.
Типы датчиков Холла
Переключатель на датчике Холла
 В самом простом случае напряжение Холла подается на электронную пороговую схему, встроенную в датчик (триггер Шмитта), которая затем выдает цифровой сигнал. Если воздействующая на датчик магнитная индукция В ниже минимального порогового уровня, то выходное значение триггера Шмитта соответствует логическому нулю (состояние разблокировки); если оно превышает максимальный пороговый уровень, то выходное значение триггера Шмитта соответствует логической единице (состояние работы). Поскольку это поведение гарантируется во всем диапазоне рабочих температур и для всех датчиков данного типа, то два этих пороговых значения находятся относительно далеко друг от друга (около 50 мТл). Иными словами, для срабатывания переключателя на датчике Холла требуется значительный скачок индукции (ДБ). Такие датчики Холла, изготавливаемые, большей частью, по биполярной технологии, на самом деле очень экономичны, но больше подходят для переключающей работы (например, переключатели Холла для срабатывания зажигания в ранних системах зажигания, цифровые датчики угла поворота, рис. «Цифровой датчик Холла для измерения угла поворота до 360о с круговым равноудаленным расположением переключателей Холла» ). Данные переключатели Холла слишком неточны для регистрации аналоговых переменных.
В самом простом случае напряжение Холла подается на электронную пороговую схему, встроенную в датчик (триггер Шмитта), которая затем выдает цифровой сигнал. Если воздействующая на датчик магнитная индукция В ниже минимального порогового уровня, то выходное значение триггера Шмитта соответствует логическому нулю (состояние разблокировки); если оно превышает максимальный пороговый уровень, то выходное значение триггера Шмитта соответствует логической единице (состояние работы). Поскольку это поведение гарантируется во всем диапазоне рабочих температур и для всех датчиков данного типа, то два этих пороговых значения находятся относительно далеко друг от друга (около 50 мТл). Иными словами, для срабатывания переключателя на датчике Холла требуется значительный скачок индукции (ДБ). Такие датчики Холла, изготавливаемые, большей частью, по биполярной технологии, на самом деле очень экономичны, но больше подходят для переключающей работы (например, переключатели Холла для срабатывания зажигания в ранних системах зажигания, цифровые датчики угла поворота, рис. «Цифровой датчик Холла для измерения угла поворота до 360о с круговым равноудаленным расположением переключателей Холла» ). Данные переключатели Холла слишком неточны для регистрации аналоговых переменных.
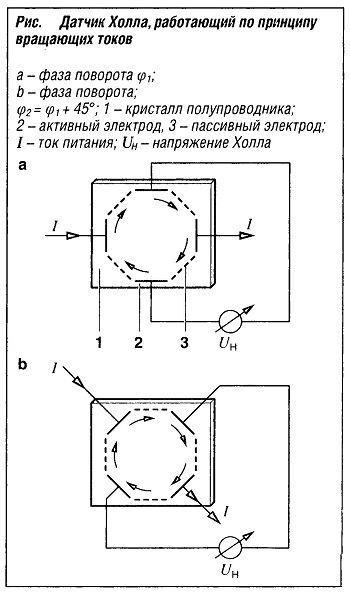
Датчики Холла, использующие принцип вращающихся токов
Недостатком простого кремниевого датчика Холла является его одновременная чувствительность к механическим нагрузкам (пьезоэлектрический эффект), неизбежно возникающим из-за принятой компоновки и приводящим к неблагоприятному смещению температурного коэффициента. Этот недостаток удалось преодолеть путем применения принципа вращающихся токов (рис. «Датчик Холла, работающий по принципу вращающихся токов» ) в сочетании с переходом к технологии CMOS. Пьезоэлектрический эффект здесь тоже возникает, но компенсируется осреднением сигнала по времени, поскольку он происходит в случае очень быстрого, электронноуправляемого переключения (ротации) электродов с другим знаком полярности. Если цель — избежать затрат на сложную электронику для переключения электродов, можно также встроить в непосредственной близости несколько датчиков Холла (2, 4 или 8) с соответственно разным расположением путей прохождения тока, и сложить их сигналы для получения среднего значения. Только такими путями удалось неплохо приспособить интегральную схему Холла к системам аналоговых датчиков. Эти меры лишь привели к уменьшению порой значительного влияния температуры на чувствительность измерения.
 |
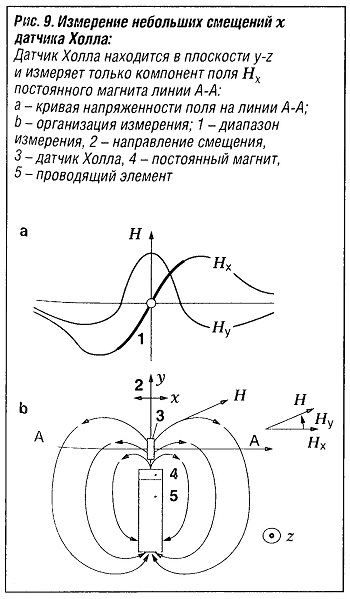 |
Такие интегральные схемы Холла прежде всего подходят для измерения небольших расстояний, при которых они регистрируют колеблющуюся напряженность поля постоянного магнита по мере приближения (рис. «Измерение небольших смещений x датчика Холла«), например, датчик iBolt для измерения массы переднего пассажира. До той поры столь же хорошие результаты можно было получить только путем использования отдельных элементов Холла из, например, полупроводников III-V (например, GaAs) с расположенным за ними гибридным усилителем.
Дифференциальные датчики Холла
В случае с двойным датчиком Холла (схемы с дифференциальными датчиками Холла, рис. «Дифференциальные датчики Холла» ), организуются две полные системы Холла на определенном расстоянии на одной пластинке. 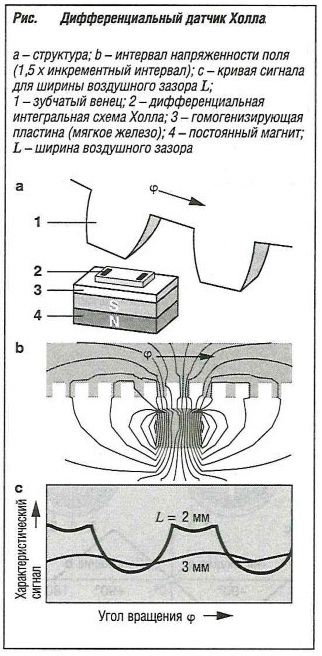 Соответствующая электронная цепь оценивает разность двух напряжений Холла. Преимущество таких датчиков состоит в том, что их выходной сигнал большей частью зависит от абсолютного значения напряженности магнитного поля, и как дифференциальные датчики они лишь регистрируют изменение магнитной индукции в пространстве, другими словами, градиент поля (отсюда распространенное название — «градиентный датчик»).
Соответствующая электронная цепь оценивает разность двух напряжений Холла. Преимущество таких датчиков состоит в том, что их выходной сигнал большей частью зависит от абсолютного значения напряженности магнитного поля, и как дифференциальные датчики они лишь регистрируют изменение магнитной индукции в пространстве, другими словами, градиент поля (отсюда распространенное название — «градиентный датчик»).
Поскольку полярность их выходного сигнала не зависит от воздушного зазора между ротором и датчиком, эти датчики в основном используются для измерения скорости вращения. Если для сканирования шестерни используется только один датчик Холла, он не сможет различить, из-за чего изменился магнитный поток — из-за дальнейшего вращения шестерни или изменения расстояния (вибрации, монтажные допуски и пр.). Это вызывает значительные погрешности сканирования, поскольку сигнал должен подаваться на двухпороговый детектор. В случае с дифференциальными датчиками ситуация в корне отличается. Здесь оценивается только разность сигналов двух датчиков Холла, расположенных на приемлемом расстоянии друг от друга по окружности.
Если разность сигналов положительная, например, расстояние между шестерней и датчиком можно менять произвольно. Расстояние останется положительным, и сумма уменьшится. Знак полярности может измениться только при дальнейшем вращении ротора. Поэтому двухпороговый детектор без проблем различит изменение в расстоянии и вращении.
Чтобы добиться как можно более сильного выходного сигнала, два датчика Холла обычно располагаются на краю пластинки (вытянутой) — расстояние между ними соответствует примерно половине промежутка между приращениями (половине межзубного промежутка ротора). Максимум сигнала очень широк и охватывает широкий диапазон изменения промежутка между приращениями. Более выраженные изменения промежутка между приращениями требуют очень сложной реконструкции датчика.
Градиентный датчик должен быть точно совмещен с направлением вращения ротора.
Датчики Холла для измерения угла поворота на угол до 180°
С помощью поворотного магнитного кольца («подвижного магнита»), вместе с несколькими фиксированными магнитомягкими токопроводящими элементами, можно генерировать выходной сигнал для более широкого углового диапазона без необходимости в преобразовании (рис. «Датчик углового положения, работающий по принципу подвижного магнита» ). Здесь биполярное поле подвижного магнита направляется через датчик Холла, расположенный между полукруглыми токопроводящими элементами. Эффективный магнитный поток через датчик Холла зависит от угла поворота φ.
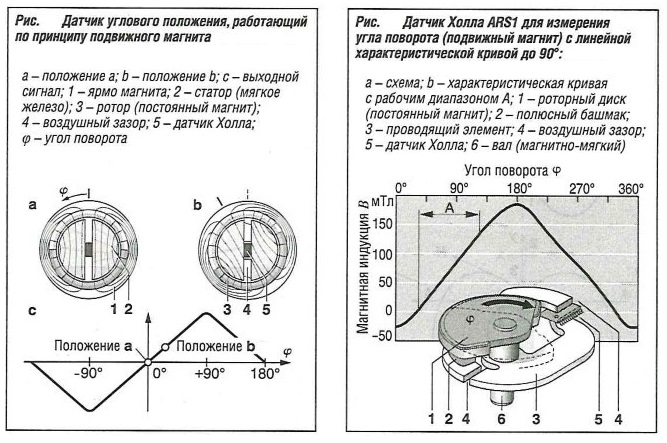
Датчик угла поворота типа ARS1 с диапазоном измерения около 90° (рис. «Датчик Холла ARS1 для измерения угла поворота с линейной характеристикой кривой до 90°» ) использует базовый принцип «подвижного магнита». Магнитный поток из практически полукруглого диска постоянного магнита возвращается в магнит через полюсный башмак, два дополнительных токопроводящих элемента, каждый из которых в своей линии магнитной индукции содержит датчик Холла, и вал, тоже ферромагнитный. В зависимости от угловой настройки магнитный поток в большей или меньшей степени проходит через два токопроводящих элемента, в линии магнитной индукции которых также имеется датчик Холла. Используя этот принцип, можно добиться практически линейной кривой.
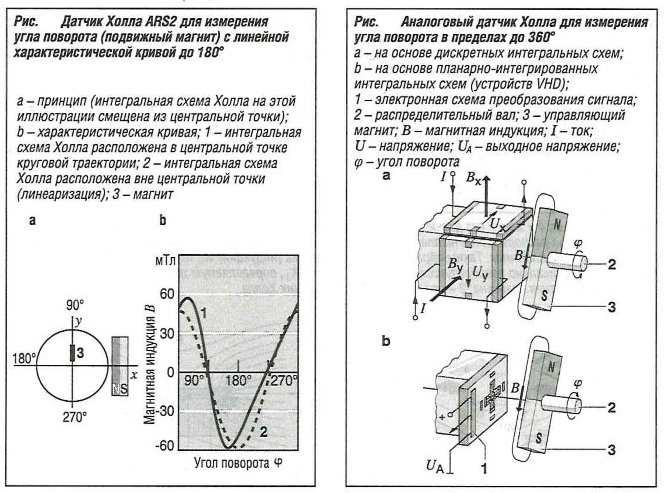
Тип ARS2 — это упрощенный вариант, обходящийся без токопроводящих элементов (рис. «Датчик Холла ARS2 для измерения угла поворота с линейной характеристикой кривой до 180°«). Здесь магнит движется вокруг датчика Холла по дуге окружности.
Лишь относительно небольшая часть получающейся синусоидальной кривой отличается хорошей линейностью. Если датчик Холла расположен немного вне центра дуги окружности, то кривая будет больше отличаться от синусоиды, и тогда мы имеем узкий диапазон измерения — почти 90° и более широкий диапазон — более 180° — при хорошей линейности. Хотя большим недостатком является низкий уровень экранирования от внешних полей, а также оставшаяся зависимость от геометрических допусков магнитного контура и колебаний интенсивности магнитного потока в постоянном магните в зависимости от температуры и времени.
Датчики Холла для измерения угла поворота на угол до 360°
На рис. «Аналоговый датчик Холла для измерения угла поворота в пределах 360°» показан аналоговый датчик Холла для измерения угла поворота до 360°. Как видно из рисунка, постоянный магнит вращается перед двумя датчиками Холла, расположенными под прямым углом друг к другу. Концепция измерения лишь незначительно ограничена до такой степени, чтобы датчик можно было установить на конце вращающегося вала. Магнит должен быть достаточно большим, чтобы не слишком зависеть от допуска на позиционирование магнита. Два датчика Холла, при максимально близкой сборке, следует располагать в направленно однородной части поля рассеяния постоянного магнита, которая также представляет угловое положение φ постоянного магнита. Датчики располагаются под прямым углом друг к другу и параллельно оси вращения постоянного магнита таким образом, чтобы они в каждом случае регистрировали компоненты х и у вектора напряженности поля В, вращаемого ими:
UH1 = Ux = B·sinφ
UH2 = Uy = B·cosφ
Применяя тригонометрическую зависимость φ = arctan (UH1/UH2), затем можно легко использовать эти сигналы для вычисления угла φ в имеющейся в свободной продаже оценочной пластинке, являющейся частью датчика. Здесь сигнал датчика обычно оцифровывается.
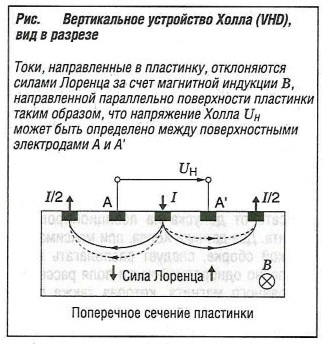 При таком расположении датчика Холла его в принципе можно также вертикально встроить таким образом, чтобы плоскость пластинки датчика была перпендикулярна оси вращения, а датчик, в отличие от обычного, плоского датчика Холла, демонстрировал чувствительность «в одной плоскости» (рис. «Вертикальное устройство Холла VHD» ). Монолитная интеграция гарантирует высокую степень точности необходимого расположения под прямым углом и необходимую компактность конструкции двух систем Холла. Датчики углового положения этого типа рассматривались, например, для реализации бесстартерных систем непосредственного пуска, где нужно было измерять абсолютное положение распределительного вала в диапазоне 360°.
При таком расположении датчика Холла его в принципе можно также вертикально встроить таким образом, чтобы плоскость пластинки датчика была перпендикулярна оси вращения, а датчик, в отличие от обычного, плоского датчика Холла, демонстрировал чувствительность «в одной плоскости» (рис. «Вертикальное устройство Холла VHD» ). Монолитная интеграция гарантирует высокую степень точности необходимого расположения под прямым углом и необходимую компактность конструкции двух систем Холла. Датчики углового положения этого типа рассматривались, например, для реализации бесстартерных систем непосредственного пуска, где нужно было измерять абсолютное положение распределительного вала в диапазоне 360°.
Однако для придания обычному плоскому датчику Холла дополнительной чувствительности «в одной плоскости» можно применять еще одно средство. В методе, используемом Мелексис-Сентроном (например, тип 2SA-10), на одной пластинке в узком кругу устанавливается в общей сложности четыре датчика Холла под углом 90° друг к другу для измерения компонентов поля Bх и Bу, возникающих в плоскости. Здесь каждый датчик, строго говоря, опять же состоит из пары элементов Холла, повернутых на 90° по упомянутым выше причинам. После изготовления полупроводниковой пластинки на нее монтируется круглая пластинка из магнитомягкого материала диаметром около 200 мкм таким образом, чтобы в положении упора датчики Холла оказывались точно под краем пластинки (рис. «Набор из 4х2 плоских датчиков Холла со встроенным магнитным концентратором IMC» ).
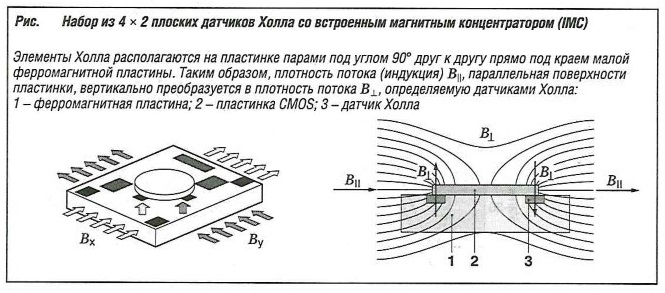
Из-за своей высокой относительной магнитной проницаемости эта пластинка выполняет функцию концентратора потока и заставляет все линии поля входить в ее поверхность вертикально. В результате линии поля, идущие горизонтально (в плоскости) без концентратора потока вынуждены в точке нахождения датчиков Холла изменить направление на вертикальное (вне плоскости) и таким образом могут управлять элементами Холла. Поскольку диагонально противоположные элементы могут «видеть» противоположные направления полей, в каждом случае оценивается разность между двумя противоположными одинаковыми напряжениями Холла для регистрации компонента поля. В то же время устраняется влияние любых существующих вертикальных компонентов Вz.
Это также возможно путем оценки суммарных сигналов диагонально противоположных элементов для регистрации вертикального компонента поля Вz, так как на это ничуть не влияет ферромагнитная пластина, и элементы не теряют свою обычную «вне плоскостную» чувствительность из-за его расположения. Поэтому при таком расположении можно зарегистрировать вектор индукции, действующий в месте нахождения датчика во всех трех компонентах. В одну пластинку с датчиком можно без значительных затрат встроить электронное устройство, необходимое для оценки сигнала, включая процессор цифровых сигналов на базе для вычисления арктангенса, и устройство для конечной регулировки датчика (EEPROM).
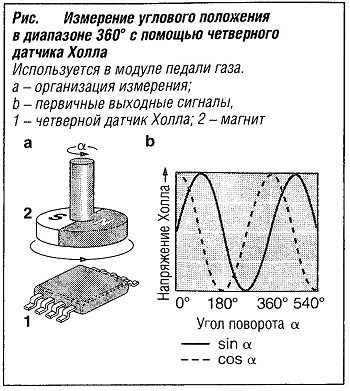 Для измерения углов до 360° достаточно поворачивать над пластинкой датчика со встроенной оценкой сигнала, как показано на рис. «Измерение углового положения в диапазоне 360° с помощью четверного датчика Холла» , желательно круглый, намагниченный постоянный магнит, расположенный параллельно пластинке. Поскольку угол поворота образуется с помощью функции арктангенса из соотношения двух синусоидальных и косинусоидальных сигналов датчиков, то напряженность магнитного поля, т.е. также старение магнита, его температурная зависимость и расстояние до поверхности датчика не играют никакой роли; определяется лишь направление вращения его намагничивания.
Для измерения углов до 360° достаточно поворачивать над пластинкой датчика со встроенной оценкой сигнала, как показано на рис. «Измерение углового положения в диапазоне 360° с помощью четверного датчика Холла» , желательно круглый, намагниченный постоянный магнит, расположенный параллельно пластинке. Поскольку угол поворота образуется с помощью функции арктангенса из соотношения двух синусоидальных и косинусоидальных сигналов датчиков, то напряженность магнитного поля, т.е. также старение магнита, его температурная зависимость и расстояние до поверхности датчика не играют никакой роли; определяется лишь направление вращения его намагничивания.
Максимальное внутреннее отклонение датчика определяется изготовителем в диапазоне 360° при +2°. Однако пользователь может значительно улучшить его при калибровке датчика. Точность цифрового вывода тогда составит 10 бит с разрешением 12 бит. Поскольку обработка сигнала процессором занимает определенное время, минимальный период амплитудно-импульсной модуляции для частоты синхронизации 20 МГц составит 200 мкс. Выходом сигнала широтноимпульсной модуляции можно управлять при максимум 1 кГц. Для инициализации датчика требуется 15 мс. Типичное значение для напряженности поля при измерении примерно равно 40 мТл. Чип концентратора принимает насыщенное состояние при плотности потока более 0,7 Тл. Датчик можно также запрограммировать на любой диапазон измерения менее 360°, что обеспечивает дополнительную функциональную безопасность посредством контроля выхода за границы диапазона.
Этот принцип используется в модулях педали газа.
Магниторезистивные датчики
В дополнение к трансверсально-направленному эффекту Холла, полупроводниковые пластинки также подвержены эффекту продольного сопротивления, также известному как эффект Гаусса. Элементы, использующие этот эффект, называются магниторезисторами и изготавливаются из полупроводника III-V, кристаллического антимонида индия (InSb). В отличие от датчиков Холла, оптимальная форма пластинки для магниторезистора более короткая и толстая и обеспечивает очень маленькое сопротивление. Поэтому для получения технически применимых значений сопротивления в килоомном диапазоне необходимо последовательно соединять большое количество этих пластинок. Эта проблема элегантно решается путем добавления в полупроводниковый кристалл микроскопически мелких иголок из антимонида никеля с очень хорошей проводимостью. Они располагаются перпендикулярно направлению тока. Еще одной мерой является применение меандровых технологий для полупроводникового резистора. Зависимость сопротивления от магнитной индукции В следует квадратичной функции до индуктивностей порядка 0,3 Тл, а выше этого уровня она становится все более линейной. Верхнего предела в диапазоне управления не существует, и динамическая реакция в технических областях применения, как и в случае с датчиком Холла, может считаться не имеющей задержек.
Поскольку температурная чувствительность имеет ярко выраженный эффект на сопротивление магниторезисторов (примерно 50-процентное снижение на 100 К), они обычно бывают только в двойной конфигурации в цепях делителей напряжения (дифференциальные магниторезисторы). Для конкретной области применения каждая из двух секций резистора должна быть магнитоуправляемой (по возможности с противоположными полярностями). Несмотря на высокий температурный коэффициент отдельных резисторов, цепь делителей напряжения гарантирует хорошую стабильность рабочей точки (точки, в которой обе секции резистора имеют одинаковое значение).
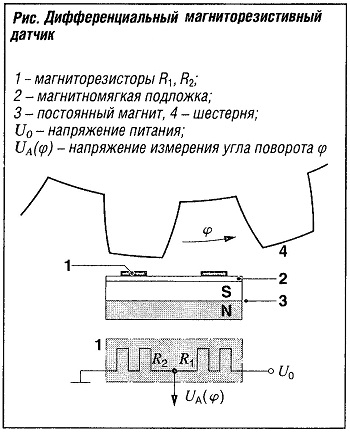 Для достижения хорошей чувствительности измерений лучше всего эксплуатировать магниторезисторы в магнитной рабочей точке между 0,1 и 0,3 Тл. Обычно необходимая магнитная основа обеспечивается небольшим постоянным магнитом (рис. «Дифференциальный магниторезистивный датчик» ), эффект которого можно усилить с помощью небольшой магнитной возвратной пластины. Магниторезистор обладает ярко выраженной температурной чувствительностью, так что он используется почти исключительно в инкрементных датчиках угла поворота и перемещения или в бинарных датчиках с ограничением значений (с переключающей характеристикой). Магниторезистивный инкрементный датчик используется для измерения регулировки момента впрыска в топливных насосах высокого давления VE в двигателях с распределенным впрыском дизельного топлива.
Для достижения хорошей чувствительности измерений лучше всего эксплуатировать магниторезисторы в магнитной рабочей точке между 0,1 и 0,3 Тл. Обычно необходимая магнитная основа обеспечивается небольшим постоянным магнитом (рис. «Дифференциальный магниторезистивный датчик» ), эффект которого можно усилить с помощью небольшой магнитной возвратной пластины. Магниторезистор обладает ярко выраженной температурной чувствительностью, так что он используется почти исключительно в инкрементных датчиках угла поворота и перемещения или в бинарных датчиках с ограничением значений (с переключающей характеристикой). Магниторезистивный инкрементный датчик используется для измерения регулировки момента впрыска в топливных насосах высокого давления VE в двигателях с распределенным впрыском дизельного топлива.
Основным преимуществом магниторезистора является его высокий уровень сигнала, обычно вольтового порядка. Это означает, что не требуются усиление и локальные электронные схемы и связанные с этим меры защиты, которые обычно необходимы. Кроме того, будучи пассивными резистивными компонентами, эти датчики очень нечувствительны к электромагнитным помехам и, в результате их высокого напряжения смещения, практически неуязвимы для внешних магнитных полей.
Магниторезистивные NiFe тонкопленочные датчики AMR
Слои NiFe толщиной всего 30-50 нм демонстрируют электромагнитные анизотропические свойства, т.е. их электрическое сопротивление изменяется под влиянием магнитного поля. Поэтому резистивные структуры этого типа называют анизотропическими магниторезистивными (AMR) элементами или просто AMR-датчиками. Обычно используемый металлический сплав также называют пермаллоем.
Технология и типы
На вытянутой резистивной полоске, как показано на рис. «Базовый принцип AMR, структура резистора с поперечными полосками» , а, происходит небольшое, самопроизвольное намагничивание Ms в продольном направлении токопроводящей дорожки даже без внешнего управляющего поля (анизотропия формы). 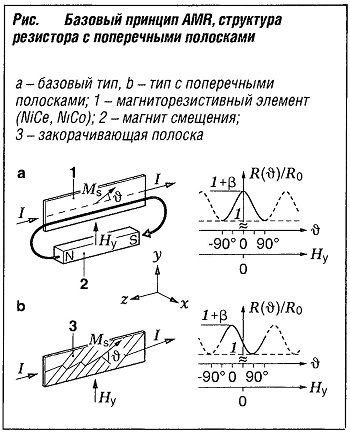 Чтобы придать этому намагничиванию четко определенное направление — теоретически, оно может быть в другом направлении — AMR-датчики часто снабжаются слабыми смещающими магнитами. В этом состоянии последовательное сопротивление имеет самое большое значение R.
Чтобы придать этому намагничиванию четко определенное направление — теоретически, оно может быть в другом направлении — AMR-датчики часто снабжаются слабыми смещающими магнитами. В этом состоянии последовательное сопротивление имеет самое большое значение R.
Если вектор намагничивания поворачивается под влиянием дополнительного внешнего поля Hу на угол φ, то последовательное сопротивление постепенно уменьшается, пока не примет при φ = 90° минимальное значение R. Здесь сопротивление зависит только от угла φ между получающимся намагничиванием Ms и током I; оно имеет примерно косинусоидную характеристику как функцию от φ:
R = R0(1+βcosφ),
где:
R= R0( 1+β) ; R = R0.
Коэффициент β обозначает максимально возможное изменение сопротивления и примерно равен 3%. Если внешнее поле намного сильнее произвольного намагничивания, а это обычно имеет место при использовании управляющих магнитов, то эффективный угол почти полностью будет зависеть от направления внешнего поля. Теперь напряженность поля не имеет значения, иными словами, датчик теперь работает в «насыщенном состоянии».
Закорачивающие полоски высокой проводимости (например, золотые) на AMR-пленке заставляют ток течь под углом менее 45° к произвольному намагничиванию (продольное направление) без воздействия внешнего поля. В результате кривая этого датчика смещается на 45° по сравнению с кривой простого резистора (рис. Ь, «Базовый принцип AMR, структура резистора с поперечными полосками» ). Это означает, что даже при напряженности внешнего поля Hу = 0 кривая находится в точке максимальной чувствительности измерения (в точке возврата). «Нанесение дорожек у двух резисторов в противоположных направлениях» означает, что их сопротивления изменяются в противоположных направлениях под воздействием одного и того же поля. Иными словами, когда одно сопротивление растет, другое падает. Кроме того, преимущество AMR-датчиков состоит в том, что будучи тонкопленочными датчиками, они могут регулироваться, например, путем лазерной подгонки до заданного значения (например, нулевой точки).
Подложка датчика состоит из слоев оксида кремния, в которые, при необходимости, может быть встроена электронная схема обработки сигналов. В настоящее время жесткая экономия диктует необходимость, по большей части, раздельного изготовления пластинки датчика и электронного чипа, и последующего монтажа на общую рамку с внешними выводами и пакетирования. Управляющее магнитное поле В создается, большей частью, магнитом, которому придается поступательное или вращательное движение через датчик.
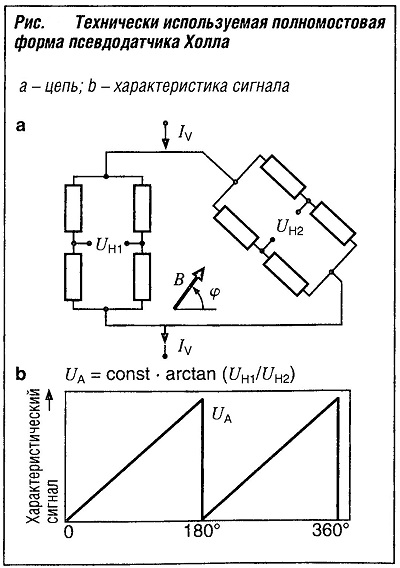
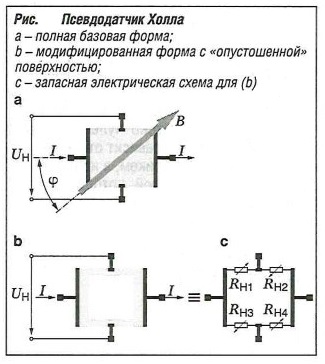 В дополнение к простым двухполюсным AMR-элементам имеются также псевдодатчики Холла, например, прямоугольные NiFe тонкопленочные структуры, которые, как уже описанные обычные датчики Холла, имеют четыре контакта: два для пути прохождения тока и два поперечных для снятия (псевдо-) напряжения Холла (рис. а, «Псевдодатчик Холла» ). Но в отличие от обычного датчика Холла псевдо-датчик Холла чувствителен к магнитным полям в плоскости пленки, а не перепендикулярно ее поверхности. Кроме того, псевдодатчик Холла не дает пропорциональной характеристической кривой; он имеет синусоидную кривую с очень высокой точностью формы, которая ни в коем случае не зависит от напряженности управляющего поля и температуры. Для поля, параллельного пути прохождения тока, выходное напряжение исчезает, чтобы затем описать полупериод синусоиды при повороте поля на угол φ = 90°. Поэтому синусоидальное напряжение получает амплитуду uн:
В дополнение к простым двухполюсным AMR-элементам имеются также псевдодатчики Холла, например, прямоугольные NiFe тонкопленочные структуры, которые, как уже описанные обычные датчики Холла, имеют четыре контакта: два для пути прохождения тока и два поперечных для снятия (псевдо-) напряжения Холла (рис. а, «Псевдодатчик Холла» ). Но в отличие от обычного датчика Холла псевдо-датчик Холла чувствителен к магнитным полям в плоскости пленки, а не перепендикулярно ее поверхности. Кроме того, псевдодатчик Холла не дает пропорциональной характеристической кривой; он имеет синусоидную кривую с очень высокой точностью формы, которая ни в коем случае не зависит от напряженности управляющего поля и температуры. Для поля, параллельного пути прохождения тока, выходное напряжение исчезает, чтобы затем описать полупериод синусоиды при повороте поля на угол φ = 90°. Поэтому синусоидальное напряжение получает амплитуду uн:
Uн = uн sin2φ
Если внешнее управляющее поле повернуть один раз на φ = 360°, выходное напряжение пройдет два полных периода синусоиды. Однако амплитуда uн сильно зависит от температуры и воздушного зазора между датчиком и управляющим магнитом; она уменьшается с ростом температуры и воздушного зазора.
Чувствительность измерений такого псевдо-элемента Холла можно значительно повысить (без излишнего искажения синусоидальной формы) путем «опустошения» элемента изнутри так, чтобы осталась только «рамка» (рис. Ь, «Псевдодатчик Холла» ). Эта модификация превращает псевдодатчик Холла в полный мост, состоящий из четырех AMR-резисторов (рис. с, «Псевдодатчик Холла» ). Даже когда мостовые резисторы имеют форму меандра, при условии, что данная минимальная ширина проводника не станет меньше, это все равно практически не влияет на синусоидальную форму сигнала.
AMR-датчики линейного и углового перемещения
Простой датчик углового перемещения для диапазонов <30°
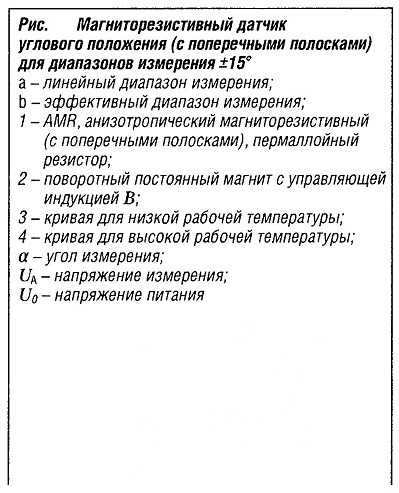
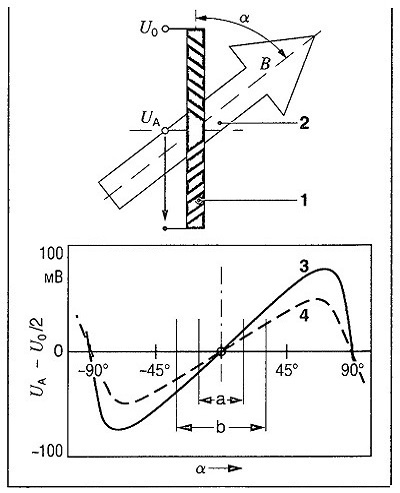
AMR-датчики углового перемещения с ограниченной точностью и ограниченным диапазоном измерения (до ±15°) зависят от дисбаланса магниторезистивного делителя напряжения, состоящего из вытянутого (он может быть также в форме меандра) пермаллойного резистора с золотыми поперечными полосками высокой проводимости (рис. » Магниторезистивный датчик углового положения для диапазонов измерения ±15°» ). В таких датчиках именно нулевая точка в значительной степени зависит от расстояния между магнитом и датчиком, а не начало характеристической кривой, которое все еще зависит от температуры (температурный коэффициент примерно равен -3·10-3/К). Такие датчики уже рассматривались в качестве экономичной альтернативы для измерения положения педалей.
 |
 |
Простой датчик линейного перемещения для миллиметрового диапазона
Можно также использовать отдельные дифференциальные штырьки с поперечными полосками для создания простейших датчиков перемещения с типичным диапазоном измерения в несколько миллиметров. Однако для достижения высокого уровня точности требуется постоянный зазор между датчиком и движущимися магнитами, что позволяет измерять положение s. Температурный коэффициент градиента кривой можно легко компенсировать с помощью дополнительного металлического тонкопленочного датчика на той же подложке, дающего примерно тот же температурный коэффициент, только с обратной полярностью (например, Pt, Ti, Ni).
Датчик угла поворота в пределах до 180°
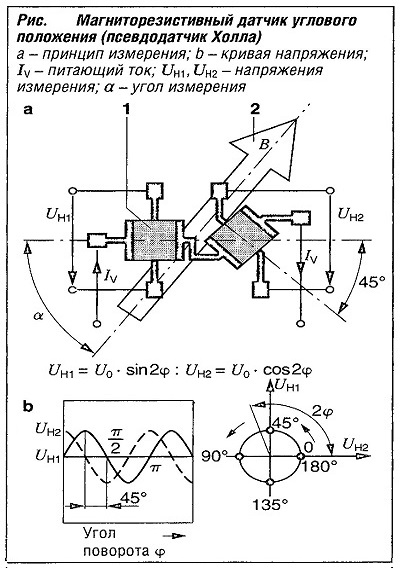
Магниторезистивные псевдодатчики Холла для измерения угла поворота используют практически на 100% синусоидальный сигнал, снимаемый с выходных контактов четырехконтактной структуры, при этом два полных периода электрического выходного сигнала соответствуют механическому вращению магнитов на 360°. С помощью второго элемента, повернутого на 45°, создается также косинусоидальный сигнал (рис. «Магниторезистивный датчик углового положения» ). Применив функцию арктангенса, можно через соотношение двух напряжений сигнала определить угол измерения с помощью микроконтроллера или специализированной интегральной схемы ASIC (см. рис. » Технически используемая полномостовая форма псевдодатчика Холла» ). Это применимо в диапазоне 180° и большей частью не зависит от изменений температуры и колебаний магнитных полей (зазоров, старения).
 |
 |
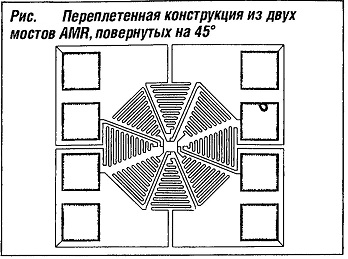 Еще одним условием высокой точности этого датчика является как минимум совпадение направления поля в обоих мостах (сверх заданной величины напряженность поля роли не играет). Это может быть гарантировано только в случае, когда оба моста находятся непосредственно один над другим. Была разработана конструкция, где два моста, расположенные под углом 45° друг к другу, были переплетены так, как будто бы они находились в одной точке и «друг на друге» (рис. «Переплетенная конструкция из двух мостов AMR, повернутых на 45°» ).
Еще одним условием высокой точности этого датчика является как минимум совпадение направления поля в обоих мостах (сверх заданной величины напряженность поля роли не играет). Это может быть гарантировано только в случае, когда оба моста находятся непосредственно один над другим. Была разработана конструкция, где два моста, расположенные под углом 45° друг к другу, были переплетены так, как будто бы они находились в одной точке и «друг на друге» (рис. «Переплетенная конструкция из двух мостов AMR, повернутых на 45°» ).
Датчик угла поворота в пределах до 360°
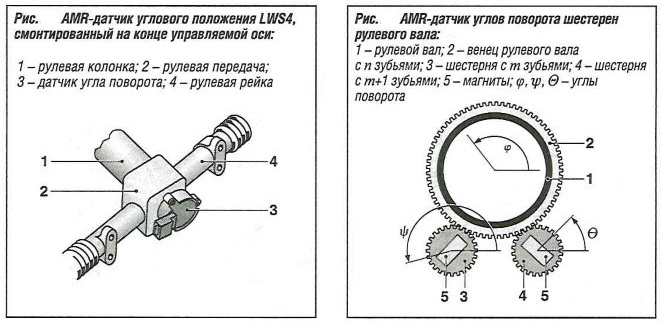
Для таких областей применения, как, например, измерение угла поворота рулевого колеса, (например, LWS4, рис. «AMR-датчик углового положения LWS4, смонтированный на конце управляемой оси» ), изображенный на рис. «Измерение углового положения в диапазоне 360° с помощью четверного датчика Холла» датчик углового положения можно расширить до диапазона 360°. С помощью дополнительного вспомогательного поля ВH, электромагнитно создаваемого через токопроводящие дорожки (под AMR- пластинкой) можно определить, в какой половине полного оборота находится управляющий магнит — в первой или во второй. Датчик можно установить только на конце какого-либо вращающегося вала. Таким образом, его можно установить, к примеру, на конце рулевого вала для измерения угла поворота рулевого колеса в системах, работающих без определения нескольких оборотов.
Датчик углового положения в диапазоне более 360° (определение нескольких оборотов)
Для измерения количества оборотов вращающейся детали (например, рулевого вала) можно использовать конфигурацию из двух псевдодатчиков Холла (под углом 180°). Два соответствующих постоянных магнита вращаются через редуктор с большим передаточным отношением (рис. «AMR-датчик углов поворота шестерен рулевого вала» ). Поскольку две малые выходные шестерни, на которых закреплены управляющие магниты, отличаются на один зуб (количество зубьев m и т+1), то их взаимный фазовый угол (разность углов поворота: Ψ—Θ) является мерой абсолютного углового положения φ рулевого вала. Система конструируется таким образом, что эта фазовая разность не превышает 360° для четырех оборотов рулевого вала, что гарантирует четкость измерения. Учитывая, что каждый датчик также предлагает индетерминантную (неопределимую) разрешающую способность угла поворота, при таком расположении для полного диапазона угла поворота рулевого вала можно получить более высокое разрешение, например, менее 1°.
GMR-датчики
GMR-датчики (гигантские магниторезистивные) были разработаны несколько лет назад и теперь впервые используются в автомобилестроении для определения углового положения и скорости вращения. 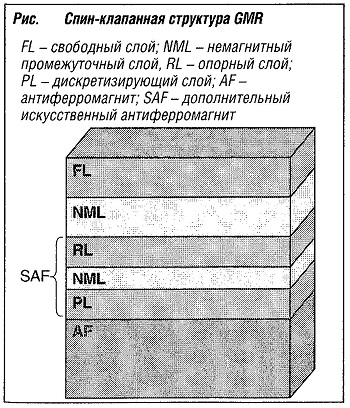 Главными преимуществами GMR-датчиков над AMR- датчиками являются естественный диапазон в 360° для определения углового положения, и более высокая чувствительность магнитного поля при определении скорости вращения.
Главными преимуществами GMR-датчиков над AMR- датчиками являются естественный диапазон в 360° для определения углового положения, и более высокая чувствительность магнитного поля при определении скорости вращения.
Спин-клапанная структура GMR состоит из антиферромагнитного, ферромагнитного и немагнитного функциональных слоев (рис. «Спин-клапанная структура GMR» ). Толщина отдельных слоев в обеих системах находится в диапазоне 1-5 нм, т.е. это несколько слоев атомов. Для определения углового положения необходимое опорное намагничивание создается посредством того, что направление намагничивания одного из ферромагнитных слоев (PL) фиксируется путем взаимодействия с соседним антиферромагнитным слоем (AF). Поэтому данный слой также называют «фиксируемым слоем». С одной стороны, намагничивание второго ферромагнитного слоя (FL), в значительной степени магнитноизолированного за счет немагнитного промежуточного слоя (NML), можно свободно поворачивать внешним магнитным полем. Соответственно, этот слой называют «свободным слоем».
Сопротивление изменяется с косинусоидальной зависимостью от угла φ между направлением внешнего поля и опорным направлением. Крайне важной для точности измерения углового положения является устойчивость опорного намагничивания к воздействию внешнего поля. Эта устойчивость сильно повышается с помощью дополнительного искусственного антиферромагнита (SAF).
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: